基于全方位发射的反坦克导弹关键技术研究
2016-10-27王海峰赵久奋
王海峰, 赵久奋
(火箭军工程大学 4501分队, 陕西 西安 710025)
基于全方位发射的反坦克导弹关键技术研究
王海峰, 赵久奋
(火箭军工程大学 4501分队, 陕西 西安 710025)
针对基于全方位发射的反坦克导弹,介绍了国内外对于垂直起飞-快速转弯技术、大迎角飞行技术及制导控制系统设计等若干关键技术方面的研究现状。研究表明,气动力/推力矢量复合控制技术是解决快速转弯的有效策略,空中自主完成全方位快速转弯是全方位发射的关键,以比例导引为基础的滑模变结构多条件约束制导律是反坦克导弹制导控制的研究方向。在此基础上,分析了反坦克导弹滚转飞行和大迎角飞行过程中存在的问题,给出了相应的研究方法,并从快速机动响应、复合制导、末端约束导引和指控一体化等方面展望了反坦克导弹的发展趋势。
反坦克导弹; 快速转弯; 全方位发射; 制导控制
0 引言
反坦克导弹是在现代陆战的直接推动下、在与坦克装甲的直接较量与对抗中逐步发展和提高的,具有精度高、威力大、射程远、结构简单、造价低廉、使用方便等优点。当今典型的反坦克导弹主要有美国的“标枪”和“陶式”、俄罗斯的“AT-4”和“AT-X-14”、法德联合研制的“米兰”、以色列的“长钉”等。目前,反坦克导弹朝着全方位、多用途、精确制导、智能化的方向发展,其战术价值和军事意义越来越突出。
随着科学技术的不断发展,反坦克导弹从最初的单一作战模式发展到现在具有综合作战能力的复合模式。在作战目标上,从攻击单一地面坦克等固定装甲目标,发展到拦截作战飞机等对空作战;在作战能力上,从攻击固定目标,到对快速移动目标实施有效拦截和毁伤;在制导方式上,从第一代反坦克导弹的有线制导、短距飞行到现在的第三代、第四代寻的复合制导、大范围火力覆盖。不论是在毁伤效能,还是在打击精度上,反坦克导弹在短短的几十年中发生了翻天覆地的变化,从而不断适应未来战场的作战需求。
较高的快速响应能力、高性能的控制、精确打击与有效的毁伤是包括反坦克导弹在内所有武器系统共同的发展目标。提高反坦克导弹快速响应能力的有效途径之一是改变导弹的发射方式,达到真正的全方位发射,垂直发射是其首选发射方式。垂直起飞后所面临的快速转弯策略的设计是需要解决的主要问题,主要是大迎角飞行造成的弹体姿态通道交叉耦合效应。精确制导是反坦克导弹等战术导弹的核心技术,复合制导有着适应性强、优势互补等特点,是目前制导技术发展的重要方向。多模复合制导可以满足导弹不同飞行阶段的需求,但是实现导弹飞行弹道的平滑、保证控制系统稳定工作,关键在于多模复合制导的交接律设计。另外,实现反坦克导弹对目标有效毁伤的途径之一是攻击目标的薄弱部位,对于坦克等装甲目标来说,顶部装甲是首选的攻击部位,这就要求反坦克导弹在着落点处满足预先设定的要求,如实施垂直攻击[1]。因此,带有末端多条件约束的导引律设计也是反坦克导弹所要研究的问题之一。
1 垂直发射技术
1.1垂直起飞及快速转弯
垂直发射具有发射装置和控制系统简单、便于在360°范围内发射瞄准以及阻力所造成的速度损失小的优点[2]。根据导弹在不同阶段的运动特点和受力特性不同,将垂直发射弹道分为垂直起飞段、程序转弯段、巡飞搜索段和末制导段。
垂直发射的关键技术之一是实现导弹的快速转弯。转弯初期,由于导弹飞行速度小,空气舵操纵效率低,为了达到快速对准和转弯的目的,一般采用推力矢量控制技术或直接力控制技术。
推力矢量控制技术[3]可以提高战术导弹全向攻击性能、减小自动驾驶仪等效时间常数,提高导弹有效载荷比;但同时也会造成大迎角飞行,导致非线性较强的气动力和力矩、在俯仰-偏航-滚动通道之间产生强烈的交叉耦合等问题。
由于反坦克导弹转弯时间短、控制系统简单,文献[4-5]提出了三种复合控制分配策略:常比例系数线性分配策略、角误差的非线性函数分配策略和最小控制能量分配策略。基于特定系数分配原则,在采用常比例系数线性分配策略基础上,通过设计复合控制回路也可以实现导弹的快速转弯[6]。同时,模糊逻辑及链式递增理论[7]、模糊PID控制[8]等现代控制方法也运用到了导弹的快速转弯策略中,满足了导弹在不同飞行阶段多样的控制需求。
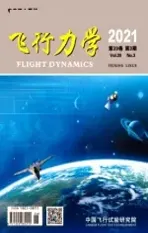
通过对导弹弹体施加直接控制力产生直接控制力矩,从而快速改变其运动姿态,实现对目标的有效打击。图1和图2分别给出了纯气动舵控制和空气舵/直接力复合控制时导弹命中目标的状态。从图中可以看出,直接力控制具有更高的控制效率,可以更好地实现导弹的快速转弯。
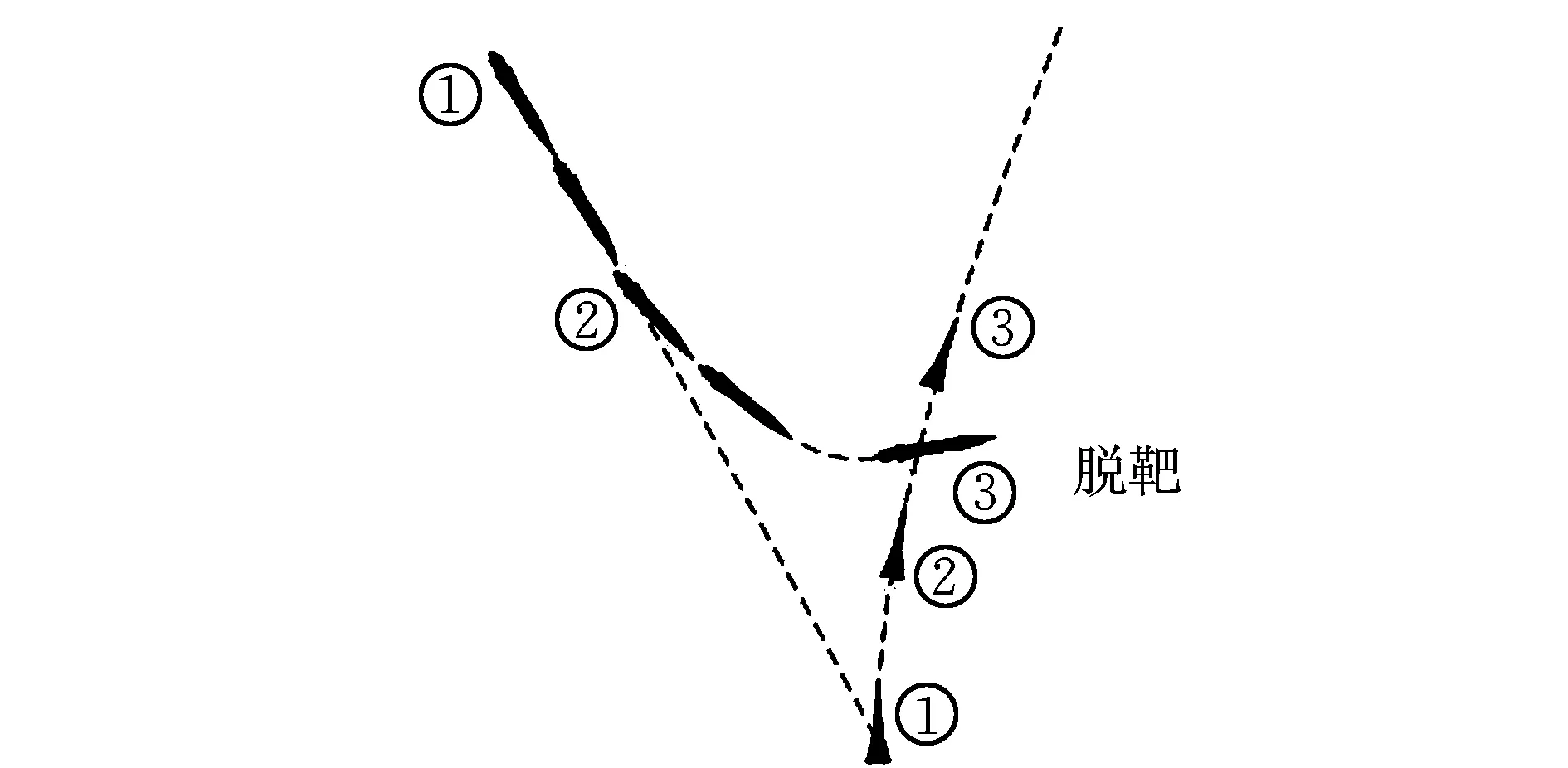
图1 纯空气舵控制Fig.1 Pure air rudder control
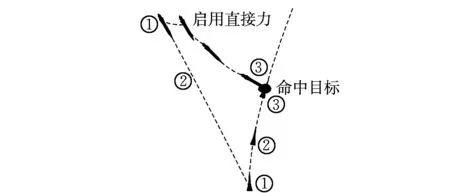
图2 空气舵/直接力复合控制Fig.2 Air rudder/direct force compound control
推力矢量控制技术和直接力控制技术虽然能够解决导弹快速转弯问题,但却会产生大迎角飞行,导致强烈的气动耦合和姿态通道耦合,不利于导弹的稳定控制。
文献[9]基于对直接力寄生回路耦合机理的分析,给出了采用气动力/直接力复合控制时导弹自动驾驶仪的稳定域。文献[10]针对弹体旋转引起的耦合效应,提出了一种对惯性积耦合和运动学耦合完全补偿的解耦设计方法。文献[11]分析了直接力/气动力复合控制模式下的两类操纵耦合原理,采用动态逆、模糊控制理论与变结构方法相结合的策略设计了鲁棒控制器。这些策略属于动态解耦,根据导弹运动的实时状态调整控制参数,实现对导弹的稳定控制。
1.2全方位发射技术
全方位发射技术对于扩大导弹攻击范围、提升导弹快速响应能力,具有良好的应用价值和军事意义。全方位发射的基本思想是:通过把控制指令传递给弹上执行机构,使导弹产生伪姿态角,改变导弹的运动姿态,也称为导弹侧飞技术。
如图3所示,导弹初始瞄准A点,如果准确测量导弹初始滚转角Δλ=λB-λA[12-13],在未改变导弹射向的前提下,通过导弹侧飞技术实现对目标B的打击。从图中可以看出,空中自主完成全方位快速转弯是实现导弹全方位发射的关键技术。在详细建立导弹全方位发射惯测组合数学模型的基础上,文献[14]应用最小时间控制理论,研究了垂直发射近程防空导弹在空中的全方位快速姿态调转技术。文献[15]推导了最速滚转控制规律,指出了提高快速滚转能力的途径,制定了一套既迅速又简便可行的全方位快速滚转程序控制方案,使导弹纵对称面与射面重合,提高弹上舵机系统的执行效率,更好地实现了对目标的攻击。
图3 全方位发射示意图Fig.3 All-directinon launching
2 制导控制技术
2.1滚转弹体控制技术
滚转导弹是指在导弹飞行过程中绕弹体纵对称轴旋转的一类导弹,主要依靠气动面或动力装置进行滚转。滚转导弹较非滚转导弹有很多优点:改善了气动不对称和发动机推力偏心等干扰因素的影响,控制装置和弹体结构更为简单[16]。但是,滚转也会使导弹运动受到马格努斯和陀螺效应的影响,其纵侧向运动以及俯仰和偏航通道会产生交叉耦合效应。
在研究滚转导弹的解耦问题初期,袁子怀[17]首先提出了一种基于线性系统理论的稳态意义上的近似解耦方法。此后,唐胜景等[18-19]采用串联解耦网络对开环系统近似解耦,通过模糊PID控制对闭环系统进行设计,实现了纵向和侧向通道间的稳定解耦;杨立峰等[20]通过Nyquist阵列判定,设计了基于频率域耦合度稳定性理论的解耦控制器。另外,文献[21]提出了一种滚转导弹智能控制方法,利用自适应退步法实现了控制参数的在线调整,优化了导弹控制参数,提高了控制系统的稳定性。
2.2大迎角飞行控制技术
随着坦克、飞机等目标的机动性能越来越高,提高反坦克导弹拦截功效的有效途径之一是提高导弹的最大可用迎角,然而,大迎角条件下的导弹空气动力学特性将变得十分复杂。通常来说,当迎角较小时采取控制面解耦算法,当迎角较大时采用推力矢量控制技术[22-23]。
基于滑模变结构理论,采用模型参考时变全程滑态变结构控制方法[24-25]可以较好地解决俯仰/偏航、滚动通道的耦合作用。仿真结果表明,该控制方法具有良好的鲁棒性和较高的控制效率;通过重构法向过载微分信号,将气动参数的变化等效为动力参数的摄动,设计了基于“过载+角速度+角度”三回路自动驾驶仪[26],工程上易于实现。另外,基于μ方法[27-28]对俯仰通道驾驶仪进行设计,也可以解决非线性气动力和空气动力系数不确定性问题。
2.3制导律分析
制导律分为经典制导律和现代制导律。经典制导律包括比例导引法、三点法、前置角法和平行接近法等;现代制导律包括BTT最优制导律和LQG最优制导律等[29]。目前制导律的研究现状为:
(1) 以寻的制导为核心的多模复合/融合制导
任何单一的制导模式都存在不足和缺点,为了适应未来复杂多变的战场,满足精确制导导弹的需求,需要为弹上控制系统提供两种以上的制导模式,提高导弹对环境的适应性。实现弹上多模复合制导的关键是实现弹道的平滑过渡及制导交接策略。目前,主要有以三角函数和多项式函数的交接律平滑算子[30];基于最优预测比例导引法,应用拉格朗日法设计的平滑过渡的中末制导交接律[31]。
(2)末端多条件约束导引
对导弹末端着落状态进行约束是精确制导技术的重要研究内容,实现导弹末端多条件约束的途径主要有:在传统比例导引中增加一时变偏差项[32-33],根据零滞后系统原理在线调整导引系数[34],实现对落角和飞行时间的约束;利用二次型最优控制设计满足导弹落角和迎角条件的变结构最优制导律[35]。Brierley等[36]最早基于变结构控制理论设计了以比例导引为基础的滑模面,孙未蒙等[37]利用虚位移概念构建弹目相对运动关系,得出了一种满足落角和入射角等多条件约束的三维变结构制导律。
(3)制导控制一体化
制导控制一体化设计考虑制导与控制之间的相互影响,可以降低制导误差,提高制导品质。通过对非线性时变不确定性实时估计和补偿,基于自抗扰控制理论较好地解决了系统阶数较高和不确定性问题[38]。通过控制设计分层思想[39]和特征结构配置方法[40]建立了三维制导控制一体化模型。考虑到耦合效应,采用微分几何法对模型进行反馈线性化、基于扩张状态观测器(ESO)和反步滑模设计思想实时观测和动态补偿耦合项[41],实现了通道间的主动解耦。
滑模变结构控制方法虽然能很好地实现控制参数适应系统当前状态,但变结构控制器比较复杂而且需要用具有大增益的控制规则切换。同时,变结构控制切换造成的系统抖振问题,都会使系统可靠性降低[42]。
3 反坦克导弹发展趋势
随着信息化战争的不断发展,反坦克导弹越来越成为战场上的尖锐武器,朝着信息化、智能化的方向发展。总结近几年国内外对于反坦克导弹相关技术的研究和发展现状,以及信息化条件下战争的需求,对反坦克导弹相关技术的发展趋势作简要论述:
(1)垂直发射,实现全方位火力覆盖,提高导弹快速响应能力;
(2)多种转弯策略综合运用,实现快速、稳定、高效转弯;
(3)多模复合制导技术,以寻的制导为核心,向着三模、多模的方向发展;
(4)运用光学全息、计算机智能识别等技术,提高目标识别效能;
(5)通过卫星信息链高速传输、信息实时共享,实现人在回路、智能控制;
(6)配备“雷达组网”,提高武器系统发现、跟踪、摧毁目标的能力;
(7)适应标准化、系列化、通用化趋势,实现一弹多用、一架多弹、三军通用。
4 结论
本文对国内外关于垂直发射反坦克导弹相关技术的研究现状作了详细的综述,并得出以下结论:
(1)针对全方位发射技术,在导弹垂直上升的过程中,基于最速滚转法,通过姿态脉冲发动机快速使弹体纵对称面转向射面,利用最小时间原理,合理设计初始导弹飞行程序角,保证弹体平稳高效地完成空中自主转弯。
(2)空气舵/燃气舵复合控制技术是实现导弹垂直起飞-快速转弯的关键,对于快速转弯造成的导弹大迎角飞行所引起的耦合效应,采用非线性解耦算法对影响程度大、建模精度高的耦合项实现完全解耦;对影响程度较大、但建模精度很差的耦合项,采用鲁棒控制器抑制其影响;对影响程度较弱、建模精度差的耦合项,可以依靠导弹制导控制系统本身的鲁棒性得以解决。
(3)针对滚转导弹耦合效应,采用前馈解耦和串联解耦对开环系统进行设计,实现导弹的近似解耦;通过模糊PID方法对闭环系统进行设计,实现纵侧向的稳态解耦。另外,现代控制理论中的最优控制理论、自适应控制理论也逐渐应用在滚转导弹的制导控制系统中。
(4)基于弹道平滑条件,设计了诸如多项式函数平滑算子交接律、最优预测中末制导交接律等策略,解决了以寻的制导为核心的多模复合制导在制导模式之间的平滑过渡交接问题。滑模变结构理论、自适应理论、二次型最优控制理论等现代控制方法广泛应用于导弹的制导律设计中,通过设置滑动模态,在线调整控制参数,实现导弹适应不同飞行环境的需求。
随着对反坦克导弹等飞行器性能要求的不断提高,传统单一的控制理论和方法不能完全满足其性能的需求。特别是对于导弹姿态通道耦合效应和复合制导模式,由于其复杂的工作环境和多条件约束的控制需求,在未来的发展中,现代控制方法包括智能控制方法,如最优控制法、变结构法、自适应法等将会成为重点研究的方向。同时,采用至少两种以上的控制方法将是未来的发展趋势。
[1]Solis R E.An analysis of the vertical launch phase of a missile concept[R].AIAA-83-0569,1983.
[2]张毅,肖龙旭,王顺宏.弹道导弹弹道学[M].长沙:国防科技大学出版社,2005:294-296.
[3]高峰,唐胜景,师娇.推力矢量控制技术在导弹上的应用[J].飞航导弹,2010(12):52-59.
[4]闫循良,徐敏,陈士橹,等.垂直发射转弯复合控制分配策略研究[J].系统仿真学报,2009,21(24):78-82.
[5]闫循良,陈士橹,王志刚,等.垂直发射快速转弯气动力/推力矢量控制研究[J].西北工业大学学报,2009,27(1):57-60.
[6]刘满国,张科.战术导弹垂直发射快速转弯复合控制研究[J].计算机仿真,2013(8):32-35.
[7]高峰,唐胜景,郭杰,等.气动力/推力矢量飞行器分阶段复合控制分配策略设计[J].系统工程与电子技术,2013,35(6):1249-1255.
[8]高晨,马文涛,张庆振.基于模糊PID的直/气复合再入控制方法研究[J].系统仿真学报,2010,22(增刊1):146-148.
[9]贾晓洪,凡永华,杨军.气动力/直接力复合控制导弹自动驾驶仪的鲁棒稳定性分析[J].弹箭与制导学报,2005,25(3):1-3.
[10]李鑫,杨军.直接力/气动力复合控制导弹自动驾驶仪解耦设计[J].宇航学报,2008,29(5):1501-1504.
[11]Zhou Fengqi,He Guangyu,Zhou Jun.Coupling analysis and robust controller design based on direct force/aerodynamic controlled re-entrty aircraft[J].Fire Control and Command Control,2010,35(7):66-69.
[12]肖龙旭,王顺宏,魏诗卉.地地弹道导弹制导技术与命中精度[M].北京:国防工业出版社,2009:377-378.
[13]肖龙旭.某型导弹全方位机动发射技术研究[R].北京:第二炮兵第三研究所,1997:23-30.
[14]高帆,李向林.垂直发射近程防空导弹全方位快速转弯技术研究[J].现代防御技术,2009,37(6):18-21.
[15]崔志强,黄寿康.垂直发射导弹全方位快速滚转控制[J].系统工程与电子技术,1986,8(11):32-39.
[16]张有济.战术导弹飞行力学设计[M].北京:宇航出版社,1998:163-171.
[17]袁子怀.旋转导弹纵侧向运动解耦的一种近似方法[J].北京理工大学学报,1989,9(2):41-50.
[18]唐胜景,郭杰.旋转飞行器的一种解耦模糊控制方法[J].北京理工大学学报,2011,31(9):1062-1065.
[19]唐胜景,钱杏芳,戴斌.旋转导弹掠飞击顶弹道控制研究[J].弹箭与制导学报,2004,24(3):65-67.
[20]杨立峰,闫晓勇.一种旋转导弹解耦控制方法[J].现代防御技术,2011,39(4):19-25.
[21]Xie Xiaozhu,Liu Zaozhen,Luo Zhilin.Intelligent adaptive control and simulation for a spin missile[C]∥Aisa Simulation Conference 2008 International Conference on System Simulation and Scientific Computing(ICSC’2008).2008:1431-1435.
[22]杨军,朱学平,袁博.现代防空导弹制导控制技术[M].西安:西北工业大学出版社,2014:84-89.
[23]杨军,朱学平,张晓峰,等.弹道导弹精确制导与控制技术[M].西安:西北工业大学出版社,2013:90-93.
[24]田进,张科.防空导弹大迎角飞行姿控系统设计[J].弹箭与制导学报,2006,26(增刊2):357-359.
[25]吴催生,张科,田进.防空导弹大迎角飞行姿态控制系统设计[J].航天控制,2006,24(2):14-16.
[26]梁雪超,杨军,邱峰.大迎角导弹法向过载控制的变结构设计[J].计算机与现代化,2014(1):46-50.
[27]张晓峰,杨军.大迎角飞行导弹控制器μ综合设计[J].火力与指挥控制,2009,34(10):125-127.
[28]张举,祝小平.大迎角飞行空空导弹鲁棒自动驾驶仪设计[J].火力与指挥控制,2010,35(4):111-113.
[29]任海龙,高敏,张恒,等.浅谈反坦克导弹关键技术[J].飞航导弹,2014(4):45-49.
[30]张磊,方洋旺,高翔,等.导弹中末制导弹道交接律研究[J].弹道学报,2014,26(2):12-16.
[31]李保刚.近距空空导弹复合制导关键技术研究[J].电光与控制,2012,19(9):23-28.
[32]Kim K S,Jung B,Kim Y.Practical guidance law controlling impact angle[J].Journal of Aerospace Engineering,2007,221(1):29-36.
[33]Jeon I S,Lee J I,Tahk M J.Guidance law to control impact time and angle[C]//2005 International Conference n Control and Automation.Budapest,2005:852-857.
[34]徐洪元,林青松,蔡远利.具有落角约束的空地导弹最优导引律[J].计算机仿真,2015,32(7):51-54.
[35]孙阳平,林王鹏,范作娥, 等.一种多约束条件下的最优末制导律研究[J].兵工自动化,2013,32(12):4-7.
[36]Brierley S D,Longchamp R.Application of sliding mode control to air-air interception problem[J].IEEE Transactions on Aerospace and Electronic Systems,1990,26(2):306-325.
[37]孙未蒙,郑志强.一种多约束条件下的三维变结构制导律[J].宇航学报,2007,28(2):344-349.
[38]薛文超,黄朝东,黄一.飞行制导控制一体化设计方法综述[J].控制理论与应用,2013,30(12):1511-1520.
[39]Yeh F K,Cheng K Y,Fu L C.Variable structure based nonlinear missile guidance/autopilot design with highly maneuverable actuators[J].IEEE Transactions on Control Systems Technology,2014,12(6):944-949.
[40]尹永鑫,杨明,王子才.导弹三维制导控制一体化设计[J].电机与控制学报,2010,14(3):87-91.
[41]张尧,郭杰,唐胜景,等.导弹制导与控制一体化三通道解耦设计方法[J].航空学报,2014,35(12):3438-3450.
[42]贾杰,刘连章,曹琦.导弹解耦控制方法综述[J].航空兵器,2010(3):18-21.
(编辑:崔立峰)
Research of key points on all-direction launched anti-tank missile
WANG Hai-feng, ZHAO Jiu-fen
(Unit 4501, Rocket Force University of Engineering, Xi’an 710025, China)
Based on the all-direction launched anti-tank missile, this paper analyzes the research achievements in the field of vertical take-off/quick turn, high attack-angle flight technique and guidance law at home and aboard. It concluded that aerodynamic/thrust vector control was used widely for solving quick turn, autonomous quick turn for all directions in the air was the key to the all-direction launching, the sliding mode control guidance law with multiple constraints based on PPN was studied; the problems existed in rolling and high AOA flight of anti-tank missile are analyzed and several corresponding research methods were put forward. Lastly, from the aspects of rapid response, complex guidance, terminal constraint guidance and command and control integration, we discussed the development trend of anti-tank missile.
anti-tank missile; quick turn; all-direction launched; guidance and control
2016-01-25;
2016-04-07; 网络出版时间:2016-05-18 13:49
王海峰(1991-),男,山东菏泽人,硕士研究生,研究方向为飞行器总体设计、结构分析与飞行力学。
TJ761.12
A
1002-0853(2016)05-0007-05