IGS RTS产品数据中断修复方法研究
2016-10-27臧建飞范士杰秦学彬陈冠旭
臧建飞 范士杰 秦学彬 陈冠旭 华 亮
1 中国石油大学(华东)地球科学与技术学院,青岛市长江西路66号,266580 2 东方地球物理公司大港物探处测量设备服务中心,涿州市范阳西路189号,072751
IGS RTS产品数据中断修复方法研究
臧建飞1范士杰1秦学彬2陈冠旭1华亮1
1中国石油大学(华东)地球科学与技术学院,青岛市长江西路66号,266580 2东方地球物理公司大港物探处测量设备服务中心,涿州市范阳西路189号,072751
针对IGS RTS(real time service)实时数据流产品难以避免的数据中断现象,开展了RTS数据中断修复方法研究,提出“插值修复”方法。在对RTS数据中断的区间分布进行统计分析的基础上,选取15 min为可修复的最大数据中断区间;采用常用的拉格朗日插值方法进行RTS轨道数据中断修复,对不同阶数的插值修复效果进行比较;提出新的基于RTS改正的精密卫星钟差计算方法,采用拉格朗日插值、三次样条插值、线性插值和线性拟合等方法进行RTS钟差数据中断修复和结果对比;最后利用IGS跟踪站观测数据和修复后的RTS产品,进行静态模拟动态的准实时PPP实验,对“插值修复”方法的效果和PPP定位精度进行验证。
IGS RTS产品;实时数据流;数据中断;插值修复;精密单点定位
针对IGS及其各分析中心发布的实时数据流改正,国内外学者分别进行了RTS产品的精度分析[1-2]和基于RTS产品的实时PPP[3-6]、实时GNSS水汽提取[7-10]等研究。然而,由于网络传输等各种不确定性因素,致使IGS等实时数据流产品难以避免地存在数据不连续或者中断现象[1],严重影响了PPP数据处理和定位精度。本文对IGS RTS产品的数据中断和可用性进行统计分析,并寻求数据中断后的应对措施。利用BNC软件接收4种RTS综合产品(IGC01、IGS01、IGS02和IGS03),对基于广播星历计算的卫星轨道和钟差进行改正,然后对基于RTS改正的实时精密卫星轨道和钟差数据的稳定性和中断现象进行统计分析。在此基础上,选取15 min为中断修复的最大时间窗口,提出“插值修复”的方法,分别采用拉格朗日插值、三次样条插值、线性插值和线性拟合等多种方法进行“插值修复”实验和结果对比。最后,利用IGS跟踪站观测数据和修复的RTS精密轨道和钟差数据,进行静态模拟动态的快速准实时精密单点定位实验,对“插值修复”方法的效果和PPP定位精度进行验证。
1 RTS产品数据中断分析
对IGS RTS 4种综合产品的稳定性进行统计分析。利用BNC软件接收了2014-12-28~2015-01-10共14 d的RTS数据,其中IGC01和IGS01的轨道、钟差采样间隔均为5 s,IGS02和IGS03的轨道采样间隔为60 s,钟差采样间隔为10 s。本文以4种产品的钟差为例,对各产品可用数据率(即实际接收数据量与应接收数据量的比值)分卫星进行统计。在统计过程中,没有考虑卫星整日无数据记录的情况,结果如图1所示。

图1 IGC01、IGS01、IGS02和IGS03产品的可用数据率Fig.1 The available data rate of IGC01, IGS01, IGS02, and IGS03 products
从图1可以看出,除PRN3、PRN6卫星外,IGC01和IGS01的数据完整性均优于IGS02和IGS03,IGS02的数据完整性整体上不如其他3种产品。对4种RTS产品连续14 d的数据进行统计分析后发现,IGS01的可用数据率最高,达到97.12%;IGC01和IGS03次之,分别为94.46%和94.00%;IGS02产品最差,可用数据率仅为88.47%。
图2给出了2015-01-08 IGC01和IGS01产品的数据中断分布情况。从图2可以看出,数据中断分布并无一定的规律,且会出现连续若干个历元整体数据丢失的现象。对比两种产品发现,不同产品的数据中断分布也不一致。造成RTS产品数据中断的原因可能与数据发布站点有关,也可能与网络传输有关。

图2 IGC01和IGS01产品的数据中断分布(2015-01-08)Fig.2 The distribution of data interruptions in IGC01 and IGS01 products(2015-01-08)
为分析IGC01和IGS01产品的数据中断分布特性,按照5 min的间隔将中断长度划分为0~5 min、5~10 min、10~15 min等13个区间,并分别统计各区间的数据中断个数占总中断个数的百分比。结果表明,5 min以内的数据中断所占比例(IGC01为95.2%,IGS01为95.8%)最高,而超过5 min的中断相对较少,因此对5 min以内的数据中断进行修复应该就可以达到连续PPP的目的。但是,对RTS产品的数据中断分析发现,有可能出现所有卫星全部数据丢失超过5 min的现象(如图2(a) 08:03:25~08:12:25区间),因此本文尝试对15 min以内的数据中断(占比约为97%)进行修复。
2 RTS产品数据中断修复
由于卫星钟差包含随时间累积的随机变化以及白噪声特性,即使是短期预报,基于多项式拟合的外推钟差的精度也不甚理想[1]。因此,本文提出了“插值修复”方法,适当增加产品延时,以确保RTS数据中断修复的精度。
仍以IGC01和IGS01产品为例进行RTS数据中断修复方法的实验和分析。在“插值修复”过程中,插值样本数据间隔的选取至关重要。当数据中断区间较长时,若选取的插值样本数据间隔太小,则无法准确反映卫星轨道和钟差的变化趋势,容易产生较大的插值误差;若插值样本数据间隔太大,则会降低RTS数据的时效性,增加产品延时,影响PPP技术的实时或准实时应用。经过多次实验,本文所采取的处理策略为:以RTS数据中断间隔的1/3作为插值样本数据的间隔,分别从数据中断的两端按照该间隔大小选取插值样本数据。当插值样本数据间隔所对应的节点上没有数据时,则选取节点前后的数据。若仍然无法满足插值计算的需求,则增大插值样本数据间隔,重新选取样本数据。当插值样本数据的间隔超过中断修复范围(如15 min)时,则放弃当前历元的数据修复。
2.1RTS轨道产品的数据中断修复
本文采用目前常用的拉格朗日插值方法对RTS轨道数据中断进行修复。首先利用IGC01、IGS01实时轨道产品,将其恢复成精密的卫星坐标[4];然后按照上述处理策略,对15 min内的坐标数据中断进行修复;最后以IGS最终产品为参考值,对“插值修复”后的RTS轨道产品进行精度评价,以间接验证插值修复的效果。
拉格朗日插值的阶数不仅关系到插值修复的精度,而且会影响到RTS产品的时延长短。以IGC01为例,分别采用不同阶数的拉格朗日插值对轨道数据中断进行修复,并对所有卫星插值修复后的RTS轨道数据相对于IGS最终轨道产品的坐标(X,Y,Z)偏差进行误差统计,其均方根差(RMS)的平均值见表1。从表1可以看出,采用6阶以上的拉格朗日插值均能取得比较理想的结果。当插值的阶数为7阶时,插值修复后的RTS轨道产品在X、Y、Z方向的精度(RMS)均优于3 cm,这与RTS产品的标称精度相当;继续增加插值的阶数,卫星轨道坐标的精度并没有显著变化,且插值阶数越高,时延越长。因此,考虑到RTS产品的时效性,本文建议选用7阶拉格朗日插值对RTS轨道产品的数据中断进行修复。

表1 插值修复后的IGC01轨道产品
利用7阶拉格朗日插值,对IGS01轨道产品的数据中断进行修复处理,同样以IGS最终产品为参考值,对“插值修复”后的轨道坐标进行精度评价。由于IGS01轨道产品是相对于卫星天线相位中心的,而IGS最终产品参考的是卫星质心,需将IGS最终产品转换到相位中心,然后再进行IGS01轨道坐标的精度验证[11]。图3给出了插值修复后的IGS01轨道产品分卫星的坐标精度(RMS)统计。从图3可以看出,除PRN 32卫星3个坐标方向的RMS均大于5 cm以外,其余卫星各方向上的RMS均在4 cm以内;所有卫星X、Y、Z3个方向RMS的平均值分别为2.7 cm、2.6 cm和2.4 cm,与表1中IGC01轨道产品的处理结果基本一致。

图3 插值修复后IGS01轨道产品所有卫星的坐标精度(RMS)Fig.3 The RMS of X,Y and Z coordinate component for every satellite with repaired IGS01 orbit product
2.2RTS钟差产品的数据中断修复
利用RTS钟差产品,直接将其恢复成精密的卫星钟差[4],由于受RTS钟差产品系统误差的影响,变化比较剧烈,直接进行插值处理容易产生较大的插值误差。因此,本文提出新的基于RTS改正的精密卫星钟差计算方法,即首先扣除RTS钟差产品中系统误差的影响,然后再利用扣除系统误差后的卫星钟差改正计算精密卫星钟差。具体的计算公式如下:
(1)
(2)
(3)

采用上述方法计算得到的精密卫星钟差序列的变化较为平缓,适合RTS钟差产品数据中断的插值修复处理。卫星钟差的变化比轨道变化复杂得多,因此本文采用多种插值方法进行RTS钟差产品数据的中断修复处理,以寻求最优方案。
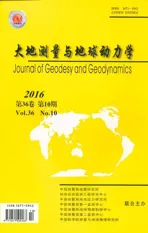
以IGC01产品为例,分别采用拉格朗日插值、三次样条插值、线性插值和线性拟合等方法,对RTS钟差产品的数据中断进行修复处理,并采用二次差的方法[2]与IGS最终产品进行比较和精度评价。表2给出了基于不同插值方法修复的IGC01产品所有卫星钟差相对于IGS最终产品的精度(RMS)统计。其中拉格朗日插值方法只选用了奇数阶,主要是因为当插值阶数为奇数时,插值点正好位于插值区间的中间,可以提高插值的精度。从表2可以看出,采用3阶或5阶拉格朗日插值均可取得比较理想的中断修复效果,所有卫星钟差的RMS均在0.3 ns以内,RMS均值为0.17 ns;而7阶拉格朗日插值修复的精度有所下降,这可能与卫星钟差的短期复杂变化有关。直接利用中断区间两端数据进行线性插值的效果最差,RMS的最大值达到3.52 ns。线性拟合、三次样条函数插值方法与3阶或5阶拉格朗日插值的精度相当,其中,线性拟合是利用3阶拉格朗日插值的数据,采用最小二乘方法确定的最佳拟合直线,其拟合效果比曲线插值方法更加平滑,这可能与卫星钟差序列呈近似线性变化有关。因此,建议采用线性拟合方法,对RTS钟差产品的数据中断进行修复处理。
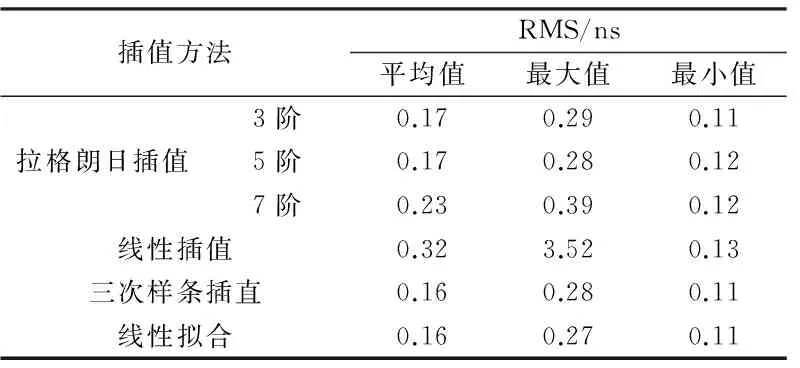
表2 不同插值方法修复的IGC01产品
采用线性拟合方法,对IGS01钟差产品的数据中断进行处理,同样以IGS最终产品为参考值进行精度评价。图4为插值修复前、后IGS01产品各卫星钟差的精度(RMS)对比。可以看出,除PRN 3卫星外,其余各卫星修复前、后卫星钟差的RMS均在0.3 ns以内,RMS均值为0.20 ns,与IGC01产品处理结果基本一致。PRN 3卫星修复前、后的RMS均超过1 ns,说明是由于IGS01钟差数据本身造成,并非是插值修复产生,这可能与PRN 3的卫星钟不稳定有关。

图4 插值修复前、后IGS01产品各卫星钟差的精度(RMS)对比Fig.4 The comparison of RMS of every satellite clock offsets with the original and repaired IGS01 products
3 基于RTS改正的快速准实时精密单点定位
为进一步说明RTS产品数据中断修复的必要性以及验证“插值修复”方法得到的RTS产品的定位效果,对IGS跟踪站(BJFS)2015-01-07的观测数据(采样间隔为30 s)进行静态模拟动态的快速准实时PPP处理。以IGS公布的精确站点坐标为参考,求取单历元PPP解在N、E、U3个方向的偏差,并对其进行误差统计和分析。
首先利用本文提出的“插值修复”方法,对2015-01-07 RTS实时轨道和钟差产品进行处理;然后,分别利用修复前、后的IGS01产品进行动态PPP处理,结果如图5所示。从图5可以看出,采用原始的IGS01实时轨道和钟差产品进行PPP处理时,由于原始数据中存在多处所有卫星数据的整体中断,导致PPP定位中断,且在重新获得改正数后,有个重新初始化的过程(图5(a))。虽然在发生中断后可采用SPP(standard point positioning)继续定位,但是其定位精度较低;而采用修复后的IGS01轨道和钟差产品,则可以很好地进行连续PPP处理,且定位结果较为稳定(图5(b))。
图5 采用修复前、后的IGS01产品的动态PPP结果Fig.5 The results of kinematic PPP based on the original and repaired IGS01 products
分别对修复后的IGC01和IGS01产品以及IGS最终产品、IGU(实测部分)产品的动态PPP结果进行精度评价。以IGS发布的BJFS站点坐标为真值,对PPP相位模糊度收敛后N、E、U方向的坐标偏差进行误差统计,结果见表3。从表3可以看出:1)采用IGS最终产品的PPP结果最优,但是其时延最长(12~18 d)。2)采用IGC01和IGS01产品的PPP结果基本一致,其平面位置精度(RMS)约为5 cm,高程精度(RMS)约为8 cm。当RTS实时数据流产品没有发生数据中断时,为实时PPP处理;而当RTS数据产生中断时,按照本文方法,其PPP处理的时延最长仅为45 min。3)基于IGU(实测部分)产品的PPP结果的平面位置精度与IGC01和IGS01产品基本相当,高程方向的精度稍差(RMS为9.5 cm),其时延为3~9 h。

表3 不同IGS产品的动态PPP结果的精度统计
4 结 语
以IGC01和IGS01为例,利用连续14 d的RTS数据,详细分析了RTS产品的数据中断现象和区间分布情况。在此基础上,分别采用拉格朗日插值、线性拟合等方法对RTS轨道和钟差产品的数据中断进行修复实验和结果比较。最后利用IGS跟踪站(BJFS)观测数据,采用修复后的IGC01和IGS01产品、IGS最终产品以及IGU(实测部分)产品进行静态模拟动态的PPP处理和精度评价。结果表明:1)目前RTS产品的数据中断大部分在5 min以内,15 min以内的数据中断约占97%;2)以IGS事后最终轨道(15 min间隔)和钟差(30 s间隔)产品为参考,采用7阶拉格朗日插值方法修复得到的RTS轨道产品在X、Y、Z方向的精度(RMS)均优于3 cm;3)基于3阶拉格朗日插值数据的线性拟合方法的修复结果比曲线插值方法更加平滑,修复后的RTS卫星钟差优于0.3 ns;4)“插值修复”处理的RTS产品的精度与其标称精度相当,静态模拟动态的快速准实时PPP的平面位置精度约为5 cm,高程精度约为8 cm。
“插值修复”方法极大地改善了RTS数据的可用性,兼顾了PPP连续定位的精度和时效性。但是,“插值修复”方法增加了RTS产品的延时,在一定程度上破坏了PPP的实时性。因此,RTS产品数据中断的实时修复方法是本文下一步研究的重点。
[1]Hadas T, Bosy J. IGS RTS Precise Orbits and Clocks Verification and Quality Degradation Over Time[J]. GPS Solutions, 2014, 19(1): 93-105
[2]尹倩倩,楼益栋,易文婷.IGS 实时产品比较与分析[J]. 大地测量与地球动力学,2013,32(6): 123-128(Yin Qianqian,Lou Yidong,Yi Wenting. Comparison and Analysis of IGS Real-Time Products[J].Journal of Geodesy and Geodynamics,2012,32(6): 123-128)
[3]Chen J P, Li H J, Wu B, et al. Performance of Real-Time Precise Point Positioning [J]. Marine Geodesy, 2013, 36(1): 98-108
[4]王胜利,王庆,高旺,等.IGS实时产品质量分析及其在实时精密单点定位中的应用[J]. 东南大学学报:自然科学版, 2013, 43(增2): 365-369(Wang Shengli,Wang Qing,Gao Wang,et al. Quality Analysis of IGS Real-Time Products and Its Application in Real-Time Precise Point Positioning[J]. Journal of Southeast University: Natural Science Edition, 2013, 43(S2): 365-369)
[5]刘志强,王解先.广播星历 SSR 改正的实时精密单点定位及精度分析[J]. 测绘科学,2014,39(1): 15-19(Liu Zhiqiang,Wang Jiexian. Realization and Analysis of Real-Time Precise Point Positioning Based on SSR Broadcast Ephemeris Corrections[J]. Science of Surveying and Mapping, 2014, 39(1): 15-19)
[6]Elsobeiey M, Al-Harbi S. Performance of Real-Time Precise Point Positioning Using IGS Real-Time Service[J]. GPS Solutions, 2016, 20(3): 565-571
[7]Shi J, Xu C, Li Y, et al. Impacts of Real-Time Satellite Clock Errors on GPS Precise Point Positioning-Based Troposphere Zenith Delay Estimation[J]. Journal of Geodesy, 2015, 89(8):747-756
[8]Yuan Y B, Zhang K F, Rohm W, et al. Real-Time Retrieval of Precipitable Water Vapor from GPS Precise Point Positioning[J]. Journal of Geophysical Research: Atmospheres, 2014, 119(16): 10 044-10 057
[9]Shi J B, Xu C Q, Guo J M, et al. Local Troposphere Augmentation for Real-Time Precise Point Positioning[J]. Earth, Planets and Space, 2014, 66(1): 1-13
[10]Shi J B, Xu C Q, Guo J M, et al. Real-Time GPS PPP Based Precipitable Water Vapor Estimation for Rainfall Monitoring and Forecasting[J]. IEEE Transactions on Geoscience and Remote Sensing, 2015, 53(6): 3 452-3 459
[11]时小飞,高成发,潘树国,等.全球定位系统实时服务数据的精度分析[J]. 导航定位学报,2013,1(4):84-88(Shi Xiaofei,Gao Chengfa,Pan Shuguo,et al. Accuracy Analysis of GPS Real-Time Service Data[J]. Journal of Navigation and Positioning, 2013,1(4):84-88)
About the first author:ZANG Jianfei,postgraduate,majors in GNSS precise point positioning and its application,E-mail:jianfeizang@163.com.
Research on Repairing Method for the Data Interruptions of IGS RTS Products
ZANGJianfei1FANShijie1QINXuebin2CHENGuanxu1HUALiang1
1School of Geosciences, China University of Petroleum, 66 West-Changjiang Road, Qingdao 266580, China 2Survey Center of BGP Offshore, CNPC, 189 West-Fanyang Road, Zhuozhou 072751, China
This paper first analyzed the data interruptions of RTS (real time service) products, and second carries on research into methods of repairing of these disruptions. According to statistics on the interval distribution of these data interruptions, the maximal repairable interval of 15 min is selected. Then, the data interruptions less than 15 min are repaired with different interpolation methods. The satellite orbit data interruptions are repaired using the common Lagrange interpolation with different orders. In order to explore the optimal solution, the satellite clock data interruptions are repaired with the Lagrange interpolation, cubic spline interpolation, linear interpolation and linear fitting, respectively. Finally, an experiment of simulative near real-time PPP on the IGS station is conducted using the repaired RTS orbit and clock products to verify the proposed method.
IGS RTS product; real-time data stream; data interruption; interpolation repairing; precise point positioning
National Natural Science Foundation of China, No. 41274011,41374044.
2015-09-26
臧建飞,硕士生,研究方向为GNSS精密单点定位技术及应用,E-mail:jianfeizang@163.com。
10.14075/j.jgg.2016.10.009
1671-5942(2016)010-0884-05
P228
A
项目来源:国家自然科学基金(41274011,41374044)。