零速修正在GNSS/INS紧组合导航中的应用研究
2016-10-27章红平高周正丁昱心
常 乐 章红平 高周正,2 丁昱心 张 全
1 武汉大学卫星导航定位技术研究中心,武汉市珞喻路129号,430079 2 武汉大学测绘学院,武汉市珞喻路129号,430079 >3 北京航空航天大学电子信息工程学院,北京市学院路37号,100191
零速修正在GNSS/INS紧组合导航中的应用研究
常乐1章红平1高周正1,2丁昱心3张全1
1武汉大学卫星导航定位技术研究中心,武汉市珞喻路129号,430079 2武汉大学测绘学院,武汉市珞喻路129号,430079 >3北京航空航天大学电子信息工程学院,北京市学院路37号,100191
为研究零速修正在GNSS/INS紧组合导航中的应用,提出综合利用GNSS/INS紧组合解算速度、IMU原始数据和多普勒观测数据的零速判断准则以及零速状态下的紧组合数学模型,并通过车载测试进行验证。结果表明,该零速判断准则对载体静止状态的判断与实际情况吻合良好,零速修正能够有效抑制载体静止状态下的IMU传感器误差积累,尤其是在卫星观测质量不好时。相对于不使用零速修正,在较短静止时间内,采用零速修正算法可以使卫星信号正常时的载体位置、速度精度分别改善27%、35%;卫星信号中断30~120 s时,载体位置和速度精度分别改善16%~75%和87%~97%;但卫星信号正常与中断时,姿态改善效果都不明显。
GNSS/INS紧组合;零速判断;零速修正;卡尔曼滤波
车载惯性导航中,零速修正(zero velocity update,ZUPT)可有效提高长时间导航的精度。其利用载体静止时的速度为零作为观测量对其他各项误差进行修正[1-3],还可用载体运动时垂向和横向速度为零作为约束条件进行动态修正[3-5]。零速修正的关键在于正确判断载体零速状态。目前,大部分学者利用IMU(inertial measurement unit)观测数据来判断载体的运动状态[3, 6-7]。但这种判断方式需要的阈值通常由IMU设备的性能以及工作环境来确定,准确率不太理想。本文提出综合利用GNSS/INS紧组合解算的速率、经误差补偿的IMU观测数据以及多普勒数据对载体的运动状态进行判断。实验结果表明,本文方法不仅提高了零速状态判断的准确率,同时明显改善了GNSS/INS紧组合导航结果的精度。
1 GNSS/INS紧组合数学模型
IMU采样率一般大于GNSS接收机,因此在GNSS观测数据不可用时,利用INS力学编排来更新状态参数中的位置、速度和姿态信息[8];若GNSS观测可用,则利用GNSS观测值与INS推算观测量以闭环修正模式进行GNSS/INS紧组合观测更新计算。
GNSS/INS紧组合系统中,状态参数x由INS误差状态和GNSS误差状态共同组成:
(1)
式中,δrn、δvn、ψ分别表示位置误差、速度误差、姿态角误差,bg、sg分别表示陀螺零偏和比例因子,ba、sa分别表示加速度计零偏和比例因子,δVtR表示接收机钟差误差,δfR表示接收机钟漂误差。
GNSS/INS紧组合中,通常采用卡尔曼滤波进行参数的时间更新和观测更新[1, 8]。状态参数x的时间更新可表示为[8]:
(2)
(3)

状态参数观测更新可表示为[8]:
(4)
(5)
式中,Kk为卡尔曼滤波增益矩阵;zk为新息向量,由INS推算的GNSS伪距、多普勒值与GNSS接收机观测的伪距、多普勒观测值作差得到;Hk为设计矩阵;Rk为观测信息先验方差矩阵,本文按高度角确定观测值先验方差[9]。
2 零速修正
零速修正可有效提高静止状态下GNSS/INS组合导航结果的精度,其中零速状态判断最为关键。本文在前人提出的基于IMU数据判断[3, 6-7]的基础上,进一步提出综合利用GNSS/INS紧组合解算速度、IMU原始数据和多普勒数据的零速判断准则:在卫星观测信号良好的情况下,优先使用多普勒观测信息判断载体运动状态;对于已经判断为零速的时刻,统计IMU观测数据的标准差,为使用IMU观测数据判断零速状态提供阈值。
2.1零速状态判断
1)GNSS/INS计算速度判定。使用GNSS/INS组合解算的NED方向速度计算得到的载体速率进行判断,设置阈值为伪距、伪距率紧组合的速度误差,小于阈值认为静止,否则认为动态。
2)IMU数据判定。当载体处于零速状态时,IMU的观测数据趋于稳定,其标准差接近0。利用一个GNSS采样间隔内经过误差补偿之后的线加速度信息和角加速度信息的标准差,当加速度计、陀螺仪3轴观测数据的标准差都小于对应坐标轴设定的阈值时认为静止,否则认为动态。由于惯导设备本身性能的多样性以及工作环境的复杂性,阈值一般不为定值,可通过统计当前GNSS采样与前2个GNSS采样都判断为静止时刻的误差补偿之后的IMU观测值标准差的RMS得到,阈值设为该RMS的2倍。
3)多普勒数据判定。卫星的多普勒观测数据具有比较高的精度,在卫星观测信号良好的情况下,可以比较准确地判断载体的运动状态。
当卫星数目大于某一数值时,对于每个卫星按式(6)计算载体径向速率vel:
(6)

若载体处于静止状态,各个卫星计算的速率接近0,统计其RMS。当RMS小于阈值时,判定为静止,否则为动态。卫星的径向速度精度为0.1cm/s[10],多普勒测速的精度为0.1m/s[11-12],卫星的径向速度误差相比于多普勒观测值误差可以忽略不计,故将统计速率RMS的阈值设为0.1m/s。当卫星数目不足时,认为多普勒数据不可靠,不使用其进行零速判断。
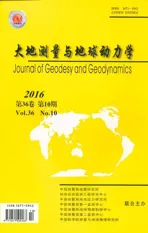
图1为本文提出的静止状态判定方法。
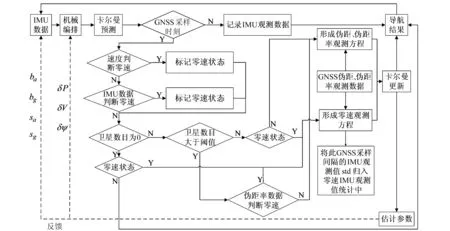
图1 零速判断流程Fig.1 Flow chart of determining the zero velocity
2.2零速修正数学模型
理论上,载体静止时导航计算出来的速度应该为零,但因观测噪声等误差的影响,载体的位置和速度会出现漂移。因此当判断为零速状态时,在有卫星信号的情况下,在伪距、伪距率观测方程基础上增加零速约束方程(7),形成零速状态观测方程;在没有卫星信号的情况下,直接使用零速约束方程,形成零速状态观测方程。零速约束方程精度极高,通过给定较小的先验方差,实现利用零速附加方程卡尔曼滤波参数解算进行强约束,达到对静止状态误差累计进行修正的目的。

(7)

3 实例分析
为验证零速修正在GNSS/INS紧组合导航中的作用,本文采用在武汉市大花岭采集的一组车载数据进行分析处理(测试轨迹见图2)。测试时长3 650s,测试环境为开阔天空,共有4段4min左右的静止,其中,后2段中有2min去掉天线,以仿真GNSS信号中断。使用TrimbleNetR9作为静止参考站,在测试车中搭载SickeEncoderDFS60里程计以及中精度光纤陀螺定位定姿系统MP-POS310,其GNSS板卡型号为TrimbleBD982。IMU的主要指标见表1,其中里程计观测数据作为零速判断的参考真值。另外,采用武汉迈普时空导航公司开发的GINS软件提供的PPK/INS松组合平滑结果作为位置、速度和姿态的参考真值。分别使用零速修正的GNSS/INS紧组合解算和不采用零速修正的GNSS/INS紧组合解算进行数据处理。

图2 测试轨迹Fig.2 Testing track

指标数值陀螺零偏0.5(°)/h角度随机游走0.05(°)/h1/2加速度零偏25mGal速度随机游走0.1m/(s·h1/2)
3.1零速判断
分别使用综合准则(GNSS/INS计算速度判定阈值设为0.5 m/s,多普勒数据判定方法的卫星数目阈值设为4颗)以及IMU数据(加速度计数据阈值设为0.001 25 m/s,陀螺仪阈值设为0.000 035 rad)进行载体零速状态判断,将结果与里程计速率判断的参考真值对比。图3、图4中,纵坐标为1表示里程计判断为静止而判断准则判断为动态;-1表示里程计判断为动态而判断准则判断为静止;0表示判断结果与里程计一致。载体在测试阶段,里程计判断有1 055个GPS历元处于静止状态,对于这些静止状态,综合准则判断正确率为99.905%,IMU数据判断正确率仅为69.95%;测试阶段载体一共经历了3 650个GPS历元,综合准则总体判断正确率为99.945%,IMU数据总体判断正确率为91.15%。可以看出,相对于IMU数据判断,综合准则很好地判断出了载体的运动状态,为进一步的零速修正提供了基础。

图3 IMU数据零速判断结果Fig.3 Results of determining the zero veclocity by IMU data
图4 综合判断零速结果Fig.4 Results of determining the zero veclocity by comprehensive method
3.2零速修正对GNSS/INS紧组合导航结果的影响分析
两种方法解算的位置、速度、姿态误差见图5。从表2、3可以看出,在静止时段,使用零速修正后的位置、速度的精度明显改善。其中,在信号良好时,北向、东向、地向位置误差RMS由不使用零速修正的2.045 m、1.422 m、3.161 m分别减少为1.648 m、0.982 m、2.209 m;北向、东向、地向速度误差RMS由不使用零速修正的0.014 m/s、0.014 m/s、0.032 m/s分别减少为0.009 m/s、0.009 m/s、0.021 m/s。在信号中断时,随中断时间的增大,位置、速度误差逐步增大,姿态误差变化不大。中断120 s时,北向、东向、地向位置误差RMS由不使用零速修正的7.328 m、8.029 m、2.726 m分别减少为1.510 m、1.181 m、2.100 m;北向、东向、地向速度误差RMS由不使用零速修正的0.087 m/s、0.135 m/s、0.015 m/s分别减少为0.003 m/s、0.003 m/s、0.003 m/s。统计结果表明,卫星信号正常与中断时,零速修正对姿态误差的改善效果都不明显。这说明零速修正可有效地抑制载体静止状态下的位置、速度误差累计,提高定位测速精度,但对姿态几乎无影响。

图5 两种方法解算的位置误差、速度误差、姿态误差Fig.5 Position errors,velocity errors and attitude errors with two methods

模式位置误差/m速度误差/m·s-1姿态误差/(°)北向东向地向北向东向地向横滚俯仰航向使用ZUPTMAX2.1931.5083.0380.0670.0440.1950.0200.0180.212RMS1.6480.9822.2090.0090.0090.0210.0040.0110.130不使用ZUPTMAX9.1268.5755.9140.0810.0580.2210.0200.0160.211RMS2.0451.4223.1610.0140.0140.0320.0050.0110.128

表3 GNSS信号中断时载体静止时段误差统计
4 结 语
本文详细分析了零速修正在GNSS/INS紧组合导航中的作用,并给出了一种综合利用解算速度、IMU观测数据以及多普勒观测数据的零速判断准则。实验结果表明,本文的零速判断准则可准确判断载体的运动状态,通过在卡尔曼滤波中使用零速修正模型,可有效抑制零速状态下的位置、速度误差的累计,提高导航结果的精度。
[1]刘川川. 基于伪距/多普勒的GPS/INS紧组合算法实现与抗差性能研究[D]. 武汉: 武汉大学, 2012(Liu Chuanchuan. Research on Robust Performance and Algorithm Implementation in Tightly Coupled GPS/INS Integration Based on Pseudo Range and Doppler Observations[D]. Wuhan: Wuhan University, 2012)
[2]高钟毓,王进,董景新,等.惯性测量系统零速修正的几种估计方法[J]. 中国惯性技术学报,1995,3(2): 24-29(Gao Zhongyu, Wang Jin, Dong Jingxin, et al. A Comparison of ZUPT Estimation Methods for Inertial Survey Systems[J]. Journal of Chinese Inertial Technology, 1995,3(2): 24-29)
[3]冯庆奇. 激光陀螺捷联惯性导航系统组合导航及零速修正技术研究[D]. 长沙: 国防科学技术大学, 2009(Feng Qingqi. Research on Integrated Navigation and Zero Velocity Update Technology of Strapdown Inertial Navigation System with Ring Laser Gyroscope[D]. Changsha: National University of Defense Technology, 2009)
[4]赵玉,赵忠,范毅. 零速修正技术在车载惯性导航中的应用研究[J]. 压电与声光, 2012,34(6): 843-847(Zhao Yu, Zhao Zhong, Fan Yi. Study on Application of Zero Velocity Update Technology to Inertial Navigation System[J]. Piezoelectrics and Acoustooptics, 2012,34(6): 843-847)
[5]方靖,顾启泰,丁天怀. 车载惯性导航的动态零速修正技术[J]. 中国惯性技术学报, 2008,16(3): 265-268(Fang Jing, Gu Qitai, Ding Tianhuai. Dynamic Zero Velocity Update for Vehicle Inertial Navigation System [J]. Journal of Chinese Inertial Technology, 2008,16(3): 265-268)
[6]高宗余,李德胜,王跃宗. 结合零速检测的微惯性系统混合滤波[J]. 光学精密工程, 2010,18(2): 377-383(Gao Zongyu, Li Desheng, Wang Yuezong. Design of Hybrid Unscented Particle Filtering Combining with ZUPT for Vehicle MINS[J]. Optics and Precision Engineering, 2010,18(2): 377-383)
[7]徐海鑫,孙付平,刘帅,等. 零速修正在GNSS/INS组合导航中的应用[J]. 全球定位系统, 2014,39(4): 42-45(Xu Haixin, Sun Fuping, Liu Shuai, et al. The Application of Zero-Velocity Update in the GNSS/INS Integrated Navigation[J]. GNSS Word of China, 2014,39(4): 42-45)
[8]Shin E H. Estimation Techniques for Low-Cost Inertial Navigation[D]. Calgary: University of Calgary, 2005
[9]Jin X X, De-Jong C D. Relationship between Satellite Elevation and Precision of GPS Code Observations[J]. Journal of Navigation,1996, 49(2): 253-265
[10]刘伟平,郝金明,李作虎. 由广播星历解算卫星位置、速度及精度分析[J]. 大地测量与地球动力学, 2010,30(2): 144-147(Liu Weiping, Hao Jinming, Li Zuohu. Solution Method and Accuracy Analysis of Satellite Position and Velocity from Broadcast Ephemeris[J]. Journal of Geodesy and Geodynamics, 2010,30(2): 144-147)
[11]刘朝英,陈国,赵齐乐,等. BDS单点测速原理及精度分析[J]. 大地测量与地球动力学, 2014,34(6): 114-118(Liu Chaoying, Chen Guo, Zhao Qile, et al. Principle and Precision Analysis of BDS Absolute Velocity Determination[J]. Journal of Geodesy and Geodynamics, 2014,34(6): 114-118)
[12]单瑞,赵铁虎,于得水,等. 单点GPS多普勒测速模型比较与精度分析[J]. 测绘通报, 2013(3): 7-9(Shan Rui, Zhao Tiehu, Yu Deshui, et al. Model Comparison and Accuracy Analysis of Single-stationed GPS Velocity Estimation Using GPS Doppler Measurements[J]. Bulletin of Surveying and Mapping, 2013(3): 7-9)
About the first author:CHANG Le, postgraduate, majors in GNSS/INS integrated navigation, E-mail: changlesgg@whu.edu.cn.
The Application of Zero Velocity Update in GNSS/INS Tightly Coupled Integration
CHANGLe1ZHANGHongping1GAOZhouzheng1,2DINGYuxin3ZHANGQuan1
1GNSS Research Center,Wuhan University, 129 Luoyu Road, Wuhan 430079,China 2School of Geodesy and Geomatics,Wuhan University,129 Luoyu Road, Wuhan 430079,China 3School of Electronic Information Engineering, Beihang University,37 Xueyuan Road,Beijing 100191,China
In this paper, the performance of zero velocity update (ZUPT) in the GNSS/INS tightly coupled integration is researched. First, we propose a zero velocity judgment method by the utilization of GNSS/INS tightly coupled solver velocity solutions, IMU raw data and doppler data. Then, the mathematical model for the ZUPT added GNSS/INS tightly coupled integration is introduced in detail, and it is verified by vehicle testing. The statistics show that the new zero velocity judgment method is very effective in detecting the static state of the platform in comparison with real situations. By using this ZUPT mode, the IMU sensor error accumulation while stationary can be constrained visibly, especially in poor observation environmental conditions. Compared to the result without ZUPT, in a short time in the stationary state, the carrier position and velocity accuracy can be improved by 27% and 35% respectively in the quality of satellite observations, and 16%-75% and 87%-97% respectively in the case of 30-120 s satellite signal interruption. However, the improvements of altitude accuracy are not obvious whether the satellite signal is normal or interrupted when the stationary time is not so long.
GNSS/INS tightly coupled integration;zero veclocity determination;zero veclocity update;Kalman filter
National High Technology Research and Development Program of China,No.2015AA124002.
2015-09-22
常乐,硕士生,研究方向为GNSS/INS组合导航,E-mail:changlesgg@whu.edu.cn。
10.14075/j.jgg.2016.10.008
1671-5942(2016)010-0879-05
P228
A
项目来源:国家863计划(2015AA124002)。