电磁感应信号导航的智能车设计与实现
2016-10-25余世干杨齐成张廉洁
余世干, 刘 勇, 杨齐成, 贾 克, 冯 拓, 张廉洁
(1.阜阳师范学院 信息工程学院,安徽 阜阳 236041; 2.安徽广播电视大学 滁州分校,
安徽 滁州 239000; 3.西安电子科技大学 软件学院,西安 710071)
电磁感应信号导航的智能车设计与实现
余世干1, 刘勇2, 杨齐成2, 贾克1, 冯拓3, 张廉洁1
(1.阜阳师范学院 信息工程学院,安徽 阜阳 236041; 2.安徽广播电视大学 滁州分校,
安徽 滁州 239000; 3.西安电子科技大学 软件学院,西安 710071)
详细介绍了智能车的整个设计开发过程.控制器使用的是飞思卡尔单片机MC9S12XS128,在通电导线的引导下,用5个电感传感器来识别未知路径.整个系统模块主要由电源、电机驱动、核心控制、速度检测、传感器和辅助调试等模块组成,为智能车良好、稳定的运行提供硬件支撑.另外在开发工具、软件以及各种调试、测试手段的帮助下,成功完成了整个智能车系统的设计,使小车可以稳定地在赛道上运行.
MC9S12XS128;系统模块;智能车;电磁感应
开展智能汽车的技术开发,对汽车工业的成长,以及公路交通的治理与控制都有着非常重要的作用.当碰到障碍时可以使小车及时有效地减速停止,避免发生意外.在军事工业上,未来的科技战争环境多变,无人飞机,无人汽车可以完成很多军事任务,还能够作为无人战车,提高军事实力,减少人员伤亡.显然,智能汽车的技术开发有着很大的意义和广泛的前景[1].
智能车技术是一种集计算机科学、模式识别等多学科于一体的新技术,具有环境识别、路径规划和自助导航等功能,由于其可控制性和方便性的特点,其将在未来的生活中广泛应用.在教育部创办的智能车竞赛的背景下,本文以MC9S12XS128单片机为主控制器,设计出的智能车以电磁感应信号为引导,在白板道路上,在无人操作条件下实现自动导航、控制车体速度和方向.
1 系统硬件结构
系统结构[2]以MC9S12XS128单片机为核心,外围扩展了速度检测、信号检测、电源、直流电机驱动以及舵机驱动等模块,具体系统结构如图1所示.
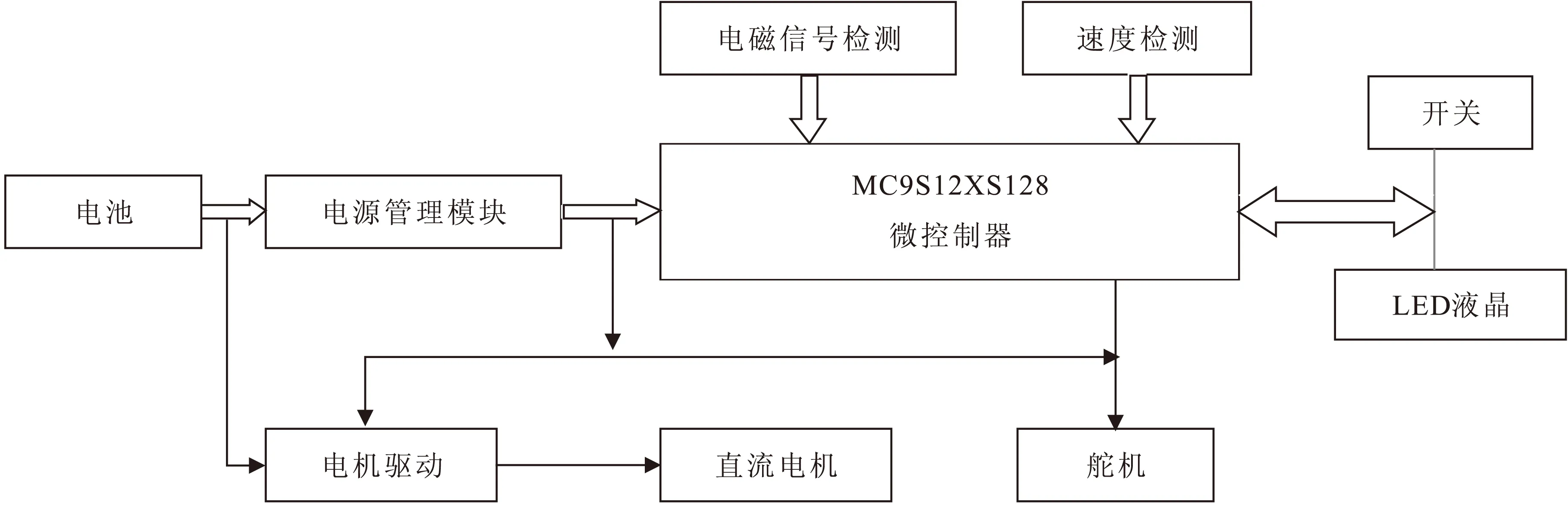
图1 智能车整体设计图
传感器模块是由两个子模块,速度传感器和电磁传感器构成,能够感知车模的状态信息和外部环境信息,为小车可以沿着跑道检测与行驶控制提供信息.
电源管理模块主要针对每个模块的输入电压要求,用稳压芯片将提供稳定的5 V,3.3 V电源、给微控制理器、传感器以及舵机使用,而电机则不需要进行稳压,可以直接用电源供电.
核心控制器MC9S12XS128是智能车的“大脑”,在此系统中主要是用来处理路况信息,根据系统算法程序进行智能判断,实现系统自动导航.

图2 智能车实际效果图
电机驱动模块主要为电机提供大的电流驱动,由于官方指定的电磁车模采用A型,它的最大的一个特点就是直流电机特别大,需要很大的电流驱动,直接用BTN7970B驱动经测试效果良好.
人机接口部分用于对程序中的参数进行选择修改以及运行状态指示,对小车的运行做实时的监控和相关的数据信息存储功能,包括LCD液晶显示和模拟键盘.
根据系统结构设计思路设计出智能小汽车实际效果如图2所示.
2 系统硬件设计
智能车追求简洁、可靠、稳定的硬件系统.除了单片机的主板为购买外,其他电路一律采用双面板或者万用板制作.电源芯片使用的是5V稳压芯片LM2940和可调稳压芯片29302,驱动芯片使用的是两块BTN7970B,传感器使用5块TL082运放芯片,将采集来的信号进行放大、二极管电压检测.调试过程中,采用过5110液晶显示器,跑道计时系统来辅助调试.
2.1单片机最小系统
如图3所示核心板MC9S12XS128的最小系统包含1个RC复位电路、1个LED指示灯、1个BDM接口、1个64引脚的母板接口、1个5 V电源接口及1个16 MHz的晶振,核心板实物图,它是Freescale公司推出的一种16位单片机,该芯片是用5V作为电源,芯片内部结构含有许多的存储器如EEPROM、RAM、Flash等,还有一些通信接口(SPI和SCI),定时器通道有8路,两个可调转换精度的A/D转换接口,同样每个也有8路,91个数字型的通用I/O口,八路PWM输出.
2.2电磁传感器设计
磁场的测量是第一个要解决的关键技术问题.智能车传感器检测的是一个通有20 kHz、100 mA电流的导线所产生磁场的道路环境.
基于麦斯威尔电磁理论,不断改变的电流四围将产生不断变化的磁场,如图4所示.
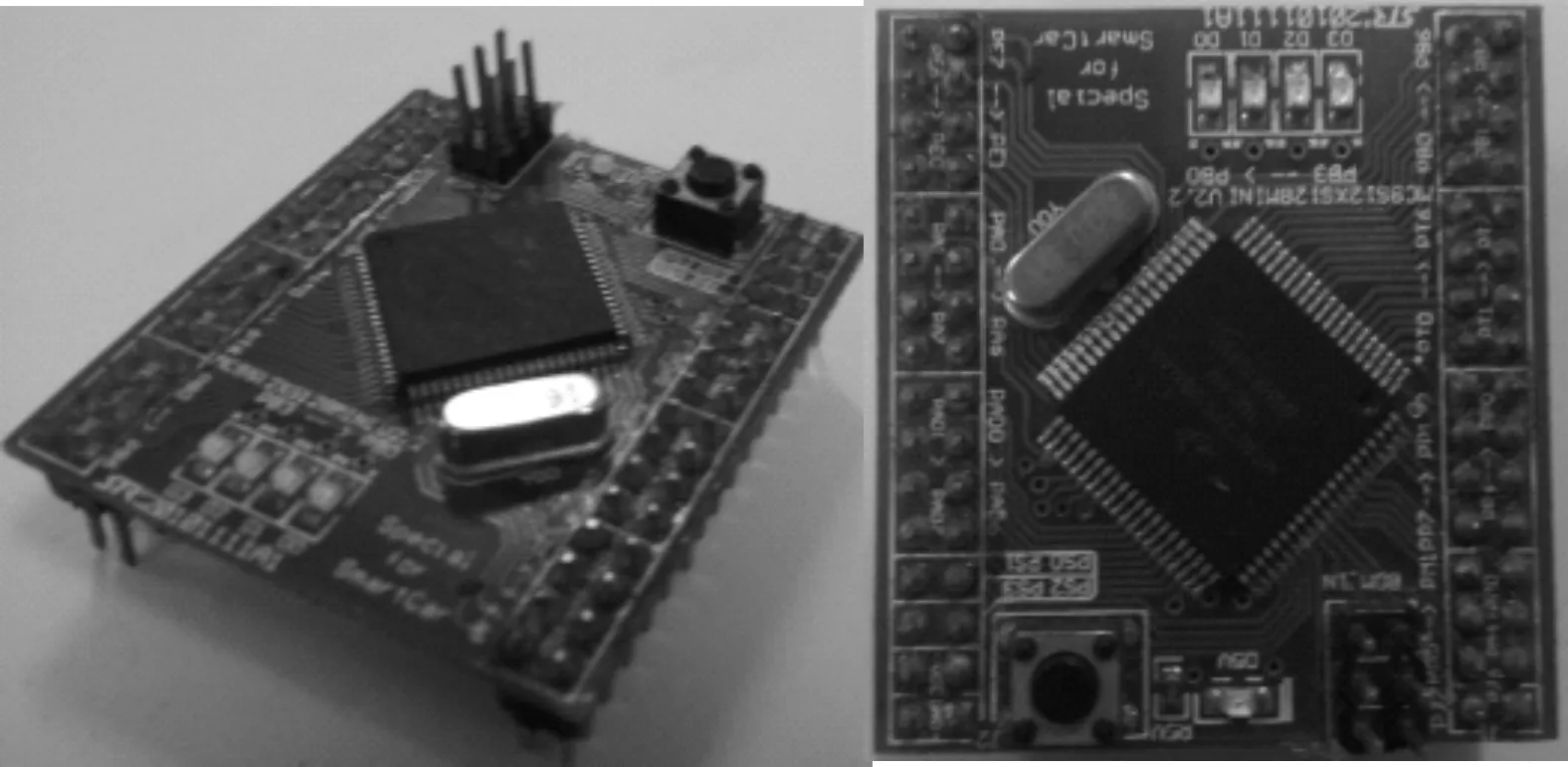
图3 核心板实物图
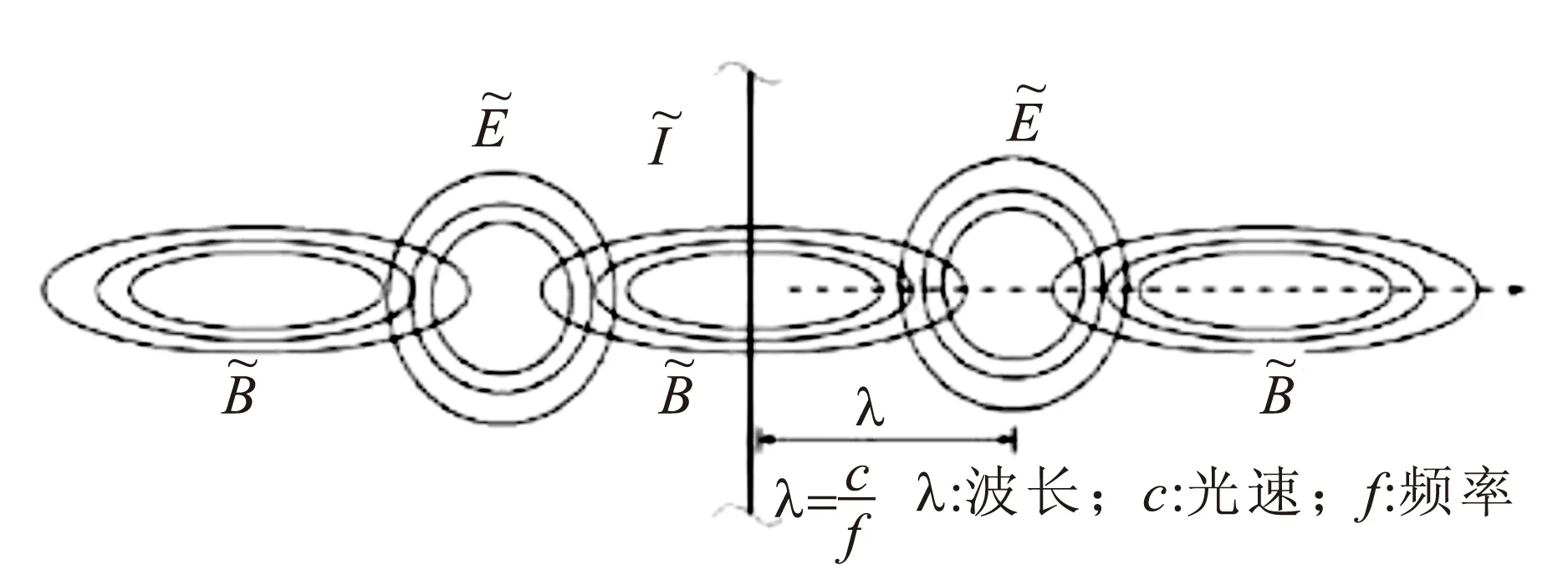
图4 通电导线周围的电磁场的示意图

图5 直线电流产生的磁场
导线所产生的电场和磁场按一定规律分布.跑道的中心位置电磁强度最大,因此通过电磁强度的检测来确定跑道的中心位置,从而进行导航.由于轨道和汽车导航线尺寸L比电磁波的波长λ小得多,电磁辐射的能量是非常小的,因而可以检测到的电磁波的能量很小.因此,将近似导线周围磁场的变化是一个缓慢变化的磁场,根据周围的磁场分布的线的静磁场的检测方法,来检测位置.通过毕奥萨伐尔定律知道:导线中电流大小为I,长为L,如图5所示[3-4].
P点处的磁感应强度计算公式为:
(1)
如图4、6对于无限长直电流来说θ1=0,θ2=Π,则有:
(2)
在图6、图7中,感应磁场是以铺设在跑道中心的导线为轴的同心圆.上面各点的磁场强度都是相等的,且导线半径r越长,电磁场的强度就越弱,如图6,图7所示.

图6 通电长导线的磁场强度

图7 直导线稳恒电流磁场示意图
由于测量磁场方法所依据的原理不尽相同,所以测量的磁场精度和范围也不一样.要根据不同的赛道情况选择正确的方法进行检测,除了需要考虑到检测磁场的准确度,还要考虑所使用的传感器的成本功耗、检测速度、模块大小、以及是否容易实现.在所有的检测方法中,决定选择电磁感应线圈的方案.此方案具有电路实现简单、体积较小、价格成本低、响应频率快等特点.利用电感线圈可对导线周围的交变磁场产生相应的感应电动势.
赛道上是选择20 kHz的环境作为检测的磁感应信号,所以信号接收处理时需要进行相应的选频和信号的放大,使20 kHz的交变磁场可以有效的进行放大,并且可以有效地去除其它信号的干扰.频率选择的电路可以使用LC串联和并联来实现,如图8所示,电感实物如图9所示.选频方式选择阻容C并联谐振回路进行选频,采用运算放大器.
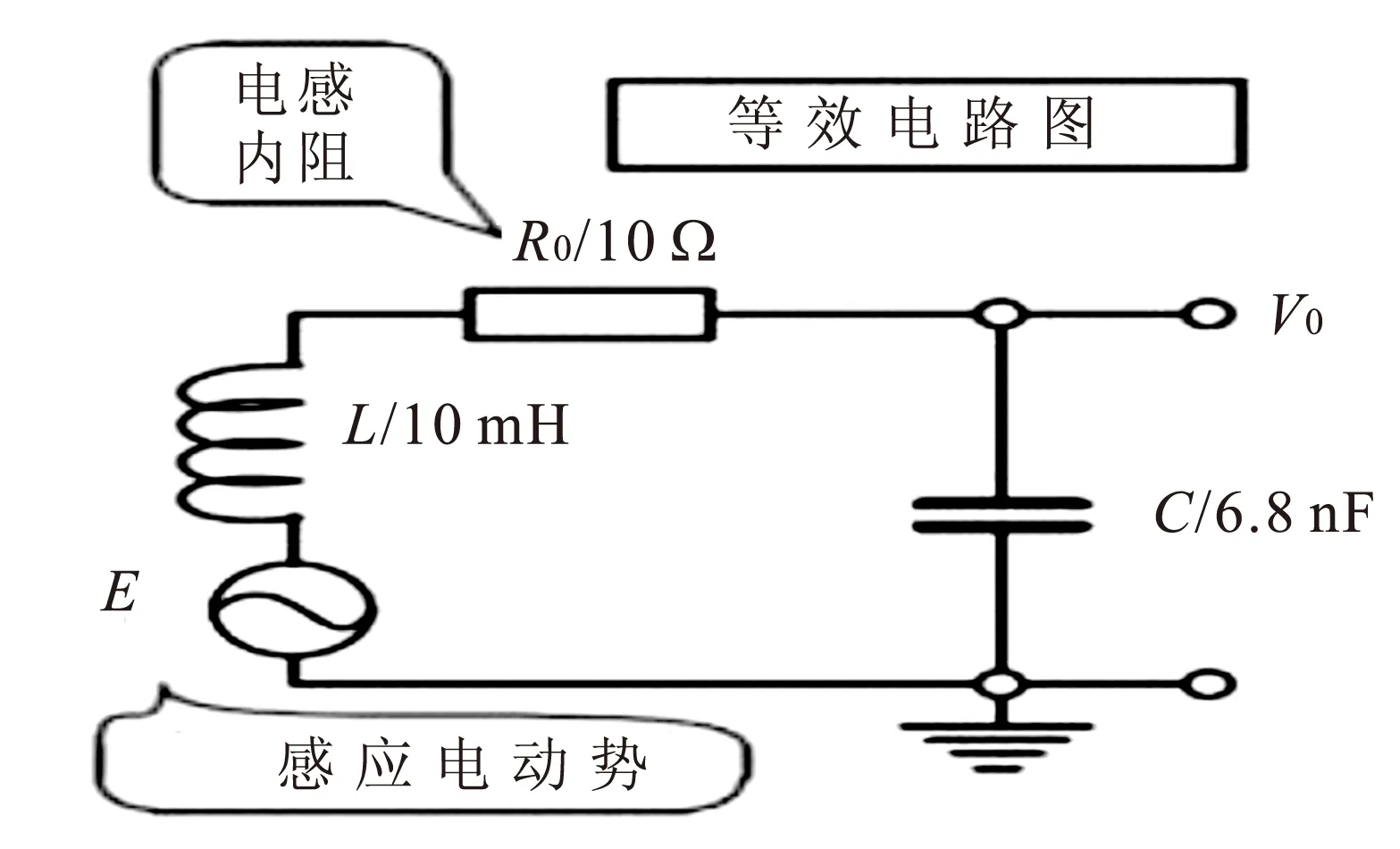
图8 LC并联谐振电路

图9 10 mH电感样品
2.3电源模块设计
本次方案[5]使用的单片机芯片,传感器为5 V供电电压,其中比较特殊的就是陀螺仪和加速度模块,此模块采用3.3 V供电电压.针对这两种供电要求,此设计选取了LM2940作为5 V稳压芯片,LM1117-3.3作为3.3 V稳压芯片.这两种芯片的性价比较高,而且可以满足此系统的供电要求.同时考虑到整体系统需要电流的大小,此设计采用将最小系统供电电源与传感器供电分别用两个5 V电源来进行供电,保证系统的正常工作.图10、图11分别为5 V稳压电路、3.3 V稳压电路原理图.

图10 5 V稳压电源电路
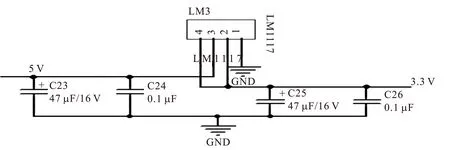
图11 3.3 V稳压电源电路
2.4直流电机驱动模块
车模采用的是直流电机,改变电流的流向即可改变电机旋转的方向.此类对电机的驱动电路大多数采用H桥电路,其原理为:用4个NMOS管构成可控制电流流向的电路从而驱动电机.在构建电机驱动电路时,要注意电机最大电流值,测量电机最大电流值,可将电机转子固定,然后根据电机可工作电压范围,选择最大电压,进行测量电流.图12为系统设计的电机驱动电路原理图.
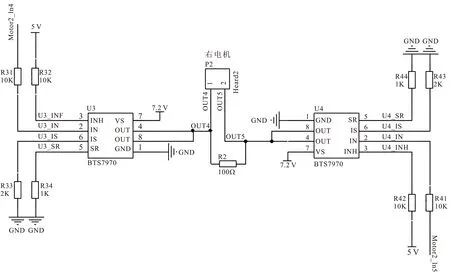
图12 直流电机驱动原理图
2.5其他模块

图13 程序结构图
其他模块的设计相当容易,在此不作详细介绍,主要包括(1)人机交互接口模块:用来调整软件程序的输入参数和其他辅助信息,以便更好地调试智能车运行状态.(2)速度检测模块采用编码器来完成,通过侦测车轮运动的速度、角度、距离、位置以及计数,再把相关信息反馈给主程序以便主程序更好地控制.
系统硬件电路的设计与开发的工具主要采用Altium Designer 09,它具有友好的开发界面,整合了原理图、PCB图,包含很多芯片厂家的原理图库,使得开发电子线路变得十分方便,同时也拥有DRC检测机制等功能.
3 系统软件设计
系统软件结构是通过硬件模块和功能需求来设计的[6-7].程序结构基本流程为:首先,进行初始化设置,系统的控制参数和各功能模块都需要进行初始化.其次,信号采集,通过传感器采集信号,即时速度.利用PD算法对舵机方向控制进行反馈调节.此外,通过传感器采集来的数据信息结合算法设计得到的数据获取前方道路的情况,同时通过光电编码器获取赛车当前的状况,对车子在行驶过程中的速度进行不断的调整,使智能车在满足比赛要求的情况下,可以沿赛道快速行驶,具体软件结构流程如图13所示.

图14 智能车在跑道上运行中
4 系统测试
系统的测试主要是完成对系统的整体结构检查是否实现预期功能,是系统设计最后一环.在本系统测试中主要包括系统中的稳压电路测试,最小系统电路测试,光电编码器测试,陀螺仪、加速度模块测试,车体单片机与PC机通信电路测试,电机驱动电路测试.通过对各模块的测试发现,各模块功能均正常,能够完成预定目标.
如图14所示经过系统设计与测试的智能车在实际跑道上运行中,智能车赛道具体参数为:整个赛道主要是由直道,U形弯道和S形弯道组成,全长45 m,赛道中心铺设有100 mA,20 Hz交变电流的铜线.
经过不断的测试改进[8-9],小车行驶的平均速度从一开始的1.0 m/s,提高到的2.65 m/s.
5 结语
本文针对电磁信号的智能车完成了自动循迹系统的设计,实现了智能车在规定的直行、S型、十字交叉路口、斜坡、自动避障等赛道上自助循迹行使.另外,基于本文所设计的智能车的控制系统的方法,也可以在其他自动控制领域发挥作用.
[1]杨明.无人驾驶车辆研究综述与展望[J].哈尔滨工业大学学报,2006,38(S):1259-1262.
[2]卓晴,黄开胜,邵贝贝.学做智能车[M].北京:北京航空航天大学出版社,2007.
[3]王能才.基于电磁导航的智能车信号检测与控制策略研究[D].兰州:兰州理工大学,2014.
[4]赵凯瑞,陶模,王明亮,等.电磁引导智能汽车设计与关键技术研究[J].西北工业大学学报,2013,31(3):487-490.
[5]于少伟.智能车辆控制的关键技术研究[D].淄博:山东理工大学,2008.
[6]李珊珊.基于单片机的两轮智能车设计[D].南京:南京理工大学,2013.
[7]于娟.提高智能车速度的研究[D].成都:电子科技大学,2010.
[8]张宇腾.基于主动视觉的智能车导航系统研究[D].上海:上海交通大学,2010.
[9]鲁云,赵亮,陈晓东,等.基于磁导航的两轮智能车系统设计[J].湖南师范大学(自然科学学报),2013,36(1):40-45.
[责任编辑马云彤]
Design and Implementation of Intelligent Car Based onthe Electromagnetic Induction Signal Navigation
YU Shi-gan1, LIU Yong2, YANG Qi-cheng2, JIA Ke1, FENG Tuo3, ZHANG Lian-jie1
(1.College of Information Engineering, Fuyang Teachers College, Fuyang 236041,China; 2. Chuzhou Branch of Anhui Open University, Chuzhou 239000, China; 3. School of Software, Xidian University, Xi’an 710071, China)
The article introduces the whole process of design and development about the intelligent car in detailed. The core controller of the smart car is a MC9S12XS128 single-chip microcomputer, which leaded under a guidance wire as well as five inductance sensor to identify the unknown path. The whole system module is mainly made up by the modules of power supply, core controller, motor, speed detection, sensor and secondary debugging module, providing hardware support for smart car with a well and stable operation. In addition, the whole system design of the intelligent car is completed successfully under the help of the development tools, software, and various debugging and testing methods, making the car run steadily on the track.
MC9S12XS128; system modules; smart car; electromagnetic induction
1008-5564(2016)03-0065-06
2016-03-01
安徽省教育厅自然科学研究项目(2015FXTZK01);阜阳师范学院自然科学研究项目(2013FSKJ15);安徽省质量工程项目(2014sxzx049;2013jyxm555;2014zjjh079);安徽省大学生创新创业训练项目(AH201413619001)
余世干(1982—),男,安徽定远人,阜阳师范学院信息工程学院讲师,硕士,主要从事嵌入式系统开发、数字图像研究.
TN966
A
