基于网络图像反馈的汽车引导控制系统研究
2016-10-25
汽车文摘 2016年9期
基于网络图像反馈的汽车引导控制系统研究
基于网络图像反馈的汽车引导控制系统在驾驶员疲惫时可以保证行车安全,并为车辆无人驾驶提供可能性。该引导控制系统的基本原理可以通过简单试验来说明。试验采用一辆自航小车,在小车中心位置的适当高度安装摄像头,小车的控制板内有微处理器、WiFi模块及一些电路控制驱动车轮转动的直流电机。
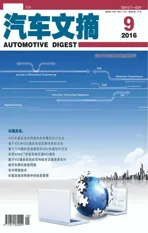
首先,安装在小车上的摄像头拾取车辆周围的图像,并通过无线WiFi网络传送给控制中心(本试验为笔记本电脑)。控制中心通过二值化、Canny边缘检测和霍夫变换等图像处理技术得到清晰的道路左右边线,并呈现在显示屏上。同时,控制系统内的导向算法会自动根据当前行车速度、路宽、车宽产生两条虚拟道路边线即警戒线,其作用是弥补图像传输时间的滞后,而警戒线只存在于系统内部,并不显示在显示屏上。之后,系统计算出车辆距左右边线的距离,经过导向算法的处理后,控制中心将控制信号同样以WiFi网络传送回小车控制板。控制板调节车辆转角使小车沿道路中心行驶。试验设备和结果如图1所示。
试验结果为0~20s内小车偏离道路中心线的位移值。该试验拾取到的道路边线为[-100,100],系统内的警戒线为[-50,50],可见无论弯路还是直路,小车行驶路径均在警戒线内,该引导控制系统的控制效果非常好。而在实际驾车时,有必要切断车与控制中心间的信号时,驾驶主动权也会及时交还给驾驶者。
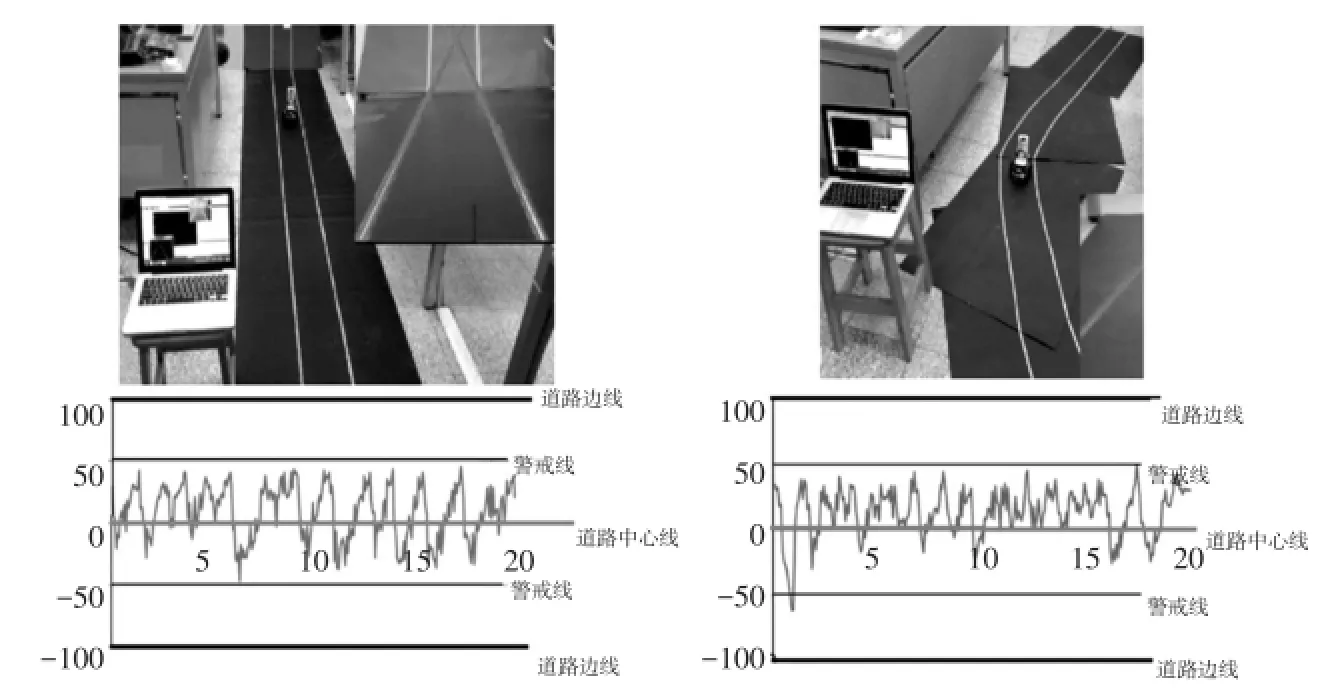
图1 基于图像反馈的汽车引导控制试验设备及结果
刊名:EURASIP Journal on Wireless Communications and Networking(英)
刊期:2016年第9期
作者:Hou-Tsan Lee
编译:杨晓帆