非接触式圆弧半径检测系统
2016-10-24桂林电子科技大学朱剑芳
桂林电子科技大学 朱剑芳
非接触式圆弧半径检测系统
桂林电子科技大学朱剑芳
曲面圆弧半径检测系统正随着近代工业技术的发展而被越来越多的应用到了工业领域中。本文对采用了电子技术、单片机、微型计算机接口、距离检测采集传感器的特性等知识来进行设计制作的工件表面曲面圆弧半径检测系统进行了理论结合实践的研究,并对距离检测传感器的工作特性、对采集到的数据进行相位计算和三角定圆等算法及系统功能软件等做了详尽的说明。
曲面圆弧半径检测;相位计算;三角定圆
引言
各种高端的加工方式随着现代社会的发展而出现,促进了制造控制技术的高速发展,检测技术所要求的条件越来越倾向于高速度、高精度、非接触等检测手段。以红外线、激光等传感器的非接触式检测技术作为代表。在众多领域,例如小型柱类零件、小直径容器等得到了广泛的应用取得了明显的经济效益。
本文用红外线的波长相对于可见光要大,其传播较容易检测,容易定向发射,方向特性好,强度容易控制等特点,研制出这一应用于曲面工件直径检测的红外线检测系统,通过“三点定圆”的方法达到求知工件直径的应用。
1 系统总体设计方案
1.1功能系统
本案中,构成曲面检测系统的电路分为两个主要的功能系统:第一部分是由红外线发射和接收电路、步进电机电路组成的系统;第二部分,是以LCD1602显示模块、AD7705 A/D采集模块、单片机控制芯片及其他辅助电路为主的接收机系统。
系统的总体设计框图如图1-1所示。
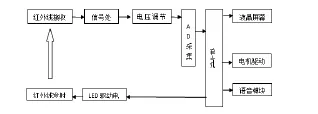
图1-1 曲面工件检测系统总体设计框图
1.2 红外线检测系统方案
本设计红外线传感器选择型号为GP2Y0A21YKF。该传感器包含了位置检测器、红外发光二极管和信号处理电路。GP2Y0A21YKF型红外传感器运用的是三角测距原理,能够以特定的角度发射出红外光线,当照射到物体之后,红外光线就会反射回来。反射回来的红外光线通过位置感应检测器检测之后,将获得的发射角度a、滤镜的焦距f、偏移距离L、中心矩X经过三角关系和几何关系计算出传感器到物体的距离D。如图1-2所示。
由图1-2可以得出,被测物体D的公式为:


图1-2 红外距离传感器测距原理框图
1.3水平平移控制系统方案
曲面检测系统采用的是 “三点定圆”的方式测出被测工件的半径。根据数学知识:利用已知三角形的三点的坐标值,可确定三角形外接圆的直径和圆心。所以,一定要要有相应的水平移动机构,带动红外线测距模块进行三点坐标横坐标的检测。根据本系统设计的需求,利用步进电机带动丝杆旋转可得出每个点的水平位移,从而通过相应的数学计算得出工件直径。在本设计中采用L298N控制芯片对步进电机进行控制。
2 系统硬件电路
2.1单片机最小系统
综合单片机的特点,及考虑到系统设计的成本性,故本系统选用价格低廉功能强大的AT89S52作为核心CPU。
2.2步进电机驱动模块
步进电机具有效率高、发热量小、能够360度旋转、输出扭矩大、能够进行精密控制等优点。当今在工业生产中多使用步进电机作为动力元件,在各种自动化控制系统中被广泛的运用。
步进电机采用L298作为驱动芯片,以使步进电机的转动步距角能够满足于系统的要求,用改变相邻两相电流的大小这一方法来驱动步进电机。
2.3AD7705模数转换模块
AD7705是使用Σ-Δ转换方式来实行16位代码性能并运用于低频测量的模拟器。该模拟器通过接受来自于传感器的信号,执行的是串行的数字输出的方式。
3 曲面检测系统的简单算法
3.1红外线测距
红外线测距的原理为红外线发生器发出红外线信号,当这个红外线射到被物体后被反射,红外线接收器接收采集。计算出红外线发射口到红外线接收口之间的相位差,通过红外测距传感器内部的计算和放大电路的处理,红外测距传感器通过输出端输出一于检测距离成比例的电压值,通过AD采集模块采集该电压值,通过模数转换检测物体的距离。通过记录程序返回值value,并测量当前被测物体的距离L,可计算出单位距离内所对应的AD值t。计算公式如下:

3.2直径计算处理
单片机经过控制红外线发射与接收并通过AD7705模数转换模块采集数据后,对这些数据进行相关的处理。
单片机在本次系统的设计中的主要功能是进行数据处理以及显示处理结果。根据数学知识:若知道三角形的三点的坐标值,就能够通过计算公式求出三角形的外接圆的直径和圆心坐标。检测出,工件上的三点A、B、C三点坐标之后,根据数学知识可计算出直线AB和BC的直线方程。从而,根据直线AB和BC的直线方程可计算出线段AB和BC所对应的中垂线A’B’和B’C’的方程,这两个方程的交点坐标(x,y)就是该工件的圆心。通过圆心与已知A、B、C三点中的任意一点,就是可求出工件的半径。半径计算的公式为:

4 程序流程图
本系统的单片机程序流程图,如图4-1所示。单片机程序完成初红外线发射和接收、AD模数转换、旋转水平移动平台的步进电机旋转控制功能。
单片机定程序完成对红外信号的模数转换,内部中断服务子程序主要完成时间值的读取、距离计算、步进电机步数的计数、输出等工作。
红外线测距时工作过程如下:(1) 由单片机产生脉冲信号
控制平台移动,通过红外线距离检测器发出红外线;(2)单片机在发送驱动脉冲时刻开始计数,以计算水平距离;(3)红外线遇到障碍物后回波被红外线传感器接收,输出模拟电压输读取AD模块,单片机通过AD模块数值计算出被测物体距离。

图4-1 主程序流程图
5 结论
本设计的最终是使用红外线测距模块产生红外线,实现红外线的发送与接收,用红外线扫描检测被测工件上三点的距离。最终以数字的形式显示出检测距离和半径。红外线检测距的原理是利用红外线的发射并接受,根据红外线发射与接收时的相位差来计算出检测的距离。对于不同被测物体进行了几组实际测量如表5-1所示。

表5-1 测量结果
曲面检测系统主要包括单片机系统、红外发射与接收电路、AD模数转换电路、步进电机驱动电路以及液晶显示电路五部分。处理器采用AT89S52单片机。红外线检测接收电路主要由GP2Y0A21YKF红外距离传感器来完成,它内部自带了红外线发射与接收时的相位差的感应以及放大计算电路,并将采集到的数据通过电压模拟量的形式输出,再由AD7705模数转换芯片采集计算后,将模拟量转变成为数字量,将数据传输给单片机,单片机通过将AD芯片采集到的数据进行计算,得出准确的距离,具有良好的市场应用价值。
[1]富鑫鑫等.采用红外测距绕行障碍物算法的机器人设计[J].上海电力学院学报.2010.
[2]修亮等.基于DSP的红外测距系统CAN总线通信[J].中国仪器仪表.2008.
[3]宋轶群等.基于PIC16F877的红外测距系统[J].仪表技术.2004.
朱剑芳(1981-),讲师,主要研究方向:电子技术应用,智能测控。
