基于ATmega328p与Android的航拍侦察六轴对转飞行器的设计
2016-10-24吉林大学珠海学院刘梦亭陈志钦
吉林大学珠海学院 刘梦亭 吴 凡 陈志钦
基于ATmega328p与Android的航拍侦察六轴对转飞行器的设计
吉林大学珠海学院刘梦亭吴凡陈志钦
本设计以ATmega328p控制芯片为核心控制器实现了六轴对转飞行器的设计,并通过蓝牙和无线串口通信的方式实现了在Android系统下的远程控制。通过电脑及手机地面站在谷歌地图上标注预计航点,将信息保存并上传至飞行器身上带有的GPS模块使其自主飞行。
ATmega328p;android;六轴对转飞行器
引言
由于天气因素的影响,卫星或载人飞机难以及时获取对灾难救助指挥的实时地面影像。采用无人机可超低空云下作业,对天气依赖小,不需要专用机场,获取地面影像速度快。
六轴式无人侦察飞行器是一种机上无人驾驶,可重复使用的航空侦察,监控飞行器。飞行器内部控制系统自主控制(自动程序控制或依靠传感器的人工智能式自动控制)执行任务,或由飞行器外的控制站(手机Android地面站及电脑地面站)发出遥控指令操纵执行任务。
爱特梅尔公司的ATmega328p单片机具有高性能、高性价比、外设丰富和低功耗等优点,本设计应用ATmega328p内核的单片机作为飞行器的行为控制器,对摄像设备进行底层驱动,图像处理及视频处理,通过2.4G的Wi-Fi无线传输图像信息到地面站的电脑上实时显示,实现航空视频拍摄及照片拍摄,并及时将信息传回地面站。也可由地面站从电脑通过ZIGBEE数字传送电台发送到飞行器的接收端。由飞控设备通过GPS定位进行飞行路线的预先设定,飞行器按照指定路线飞行,实现自主导航,自主盘旋,并且在失去信号时自动回到GPS记录的初始位置,实现无人控制的远程无线遥感控制飞行器自主飞行。
超声波定高可实现高度保持模式,即飞控设备参与控制飞机高度,结合云台增稳抗震系统保持摄像机的平稳,适合航拍。
1.硬件设计
六轴无人飞行器是一种有动力、可控制、能携带多种任务设备、执行多种任务,并能重复使用的无人驾驶航空器。简称无人机(Unmanned Aerial Vehicle缩写UAV)。由于飞行器的研发在民用和军事领域中具有广阔的应用前景,众多的航模爱好者、科学家致力于微型飞行器的研究。目前在市场上出现较多的是三轴、四轴的飞行器,六轴对转飞行器相对非常少。

图1 硬件控制原理图
本课题研究以六轴微型飞行器的机型特点,采用螺旋桨上下对转形式,减小气流对旋翼的影响,增强了飞行器的稳定性,结合ATMEGA328P单片机的优越性能,以ATMEGA328P为控制单元核心,加上相应的电源电路、串/并口通讯电路、传感器检测电路及PWM信号隔离电路等,进行了六轴飞行器系统的硬件设计(见图1)。
本设计采用Y6布局,共有三个输出轴,每个输出轴有两个旋转方向相反的动力系统,这代表了一旦在空中某一个电动机(螺旋桨)发生故障,由于同一输出轴上还有一个具有较大剩余功率的动力系统,飞机的控制系统会自动加大剩余功率的使用,使飞行器从容返回并安全降落。

图2 六轴对转螺旋飞行器
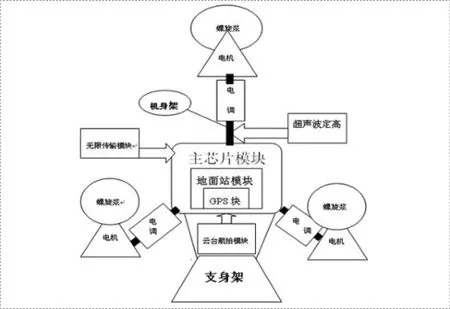
图3 六轴对转无人飞行器机身硬件设计
动力系统:多轴飞行器通常由多个电动机直接带动螺旋浆旋转产生升力 。以无刷无感马达为动力核心,无刷电子调速器,用于产生三相交流电,以PWM信号的脉冲宽度来控制输出的电压及电流,进而控制电动机转速。
2.软件设计
由地面站(ground station)从电脑通过ZIGBEE数据传输电台发射到飞行器上的接收端,由飞控设备配合GPS实现自主导航,自主盘旋,并且在失去信号时自动回到GPS记录的初始位置。或由手机android系统地面站通过蓝牙与飞行器上的蓝牙模块对接实现数据的传送,通过地面站在谷歌地图上标注预计航点,这样通过手机GPS也可实现自主导航。
软件采用手机Android地面站及电脑地面站显示终端,实现飞行试飞调试及控制。
软件调试:启动无线传输模块,在遥控模式下试飞六轴飞行器,观察其震动剧烈程度,打开mission planner软件反复调试P、I、D值,直到飞行状况十分稳定。

图4 手机地面站

图5 蓝牙模块实现短距离实时操控
采用zigbee1605A无线数字传输模块实现数字通讯,电脑作为视频监控站,可以多航点自动飞行;能显示实时的飞机姿态与高度,航向等功能;能显示飞机在谷歌地图上的位置与航向,及高度。相当于一个无人机的雷达,可以跟踪自己的飞机所在,在电脑地面站上进行监测。
图6 电脑地面站
GPS定点与导航自主飞行系统的设计,通过手机地面站在谷歌地图上标注预计航点,将信息保存并上传至飞行器身上带有的GPS模块,使其自主飞行。根据实时GPS坐标判断飞行器是否发生漂移或者偏离预定飞行轨道。并且在失去信号时自动回到GPS记录的初始位置。

图7 GPS定点与导航自主飞行系统的设计
3.结束语
六轴对转飞行控制系统的机上部分包括:六轴姿态稳定与控制系统,自主飞行控制和指挥系统,飞行轨迹和导航控制系统,起飞与精确着陆飞行控制系统,及飞行安全控制系统。飞行控制系统的地面部分包括:飞行操纵和指令系统,飞行监控及显示系统,飞行定位系统,飞行自动指令系统,手机地面站系统。
该设计实现了航拍及无线视频及图像传输功能,研究成果可应用于电力巡线,灾害评估,农林喷药等民用领域。
[1]刘峰等.四轴飞行器姿态控制系统设计[J].计算机测量与控制,2011,19(3).
[2]孙骅.基于GPS与AHRS的四轴飞行器悬停算法研究[J].机械科学与技术,2013,Vol.32,No.4.
[3]X-600D四轴飞行器使用说说[S].香港:香港科比特科技有限公司.
[4]张明连.飞行控制系统[M].北京:航空工业出版社,1994.
刘梦亭(1981-),女,江西景德镇人,工学硕士,讲师,主要研究方向:系统工程,嵌入式开发,信号处理。
吴凡(1995-),男,广东汕头人,在校大学生,主要研究方向:机械设计制造及其自动化,机电一体化,机械结构原理设计。
陈志钦(1994-),男,广东茂名人,在校大学生,主要研究方向:微电子工程,嵌入式开发。
2015年广东大学生科技创新培育专项资金(“攀登计划”专项资金)立项项目:四轴无人机智能运输系统;吉林大学珠海学院质量工程立项(ZLGC20130701),项目名称:以多层次MCU为核心的系列课程实践教学改革与创新;吉林大学珠海学院质量工程立项(ZLGC20150706)项目名称:数字信号处理精品课建设。
