基于北斗短报文的列车通信系统
2016-10-24兰州交通大学自动控制研究所甘肃省高原交通信息工程及控制重点实验室陈光武赵晓春
兰州交通大学自动控制研究所 甘肃省高原交通信息工程及控制重点实验室 杨 厅 陈光武 赵晓春
基于北斗短报文的列车通信系统
兰州交通大学自动控制研究所 甘肃省高原交通信息工程及控制重点实验室杨厅陈光武赵晓春
针对CTCS-3列控系统,分析了它的系统结构和列车控制命令的传输流程。通过介绍北斗卫星导航定位系统和北斗短报文的工作原理,提出了一种基于北斗短报文的列车通信系统。该系统能满足在地面信号系统故障,无法为车载子系统传输控制命令时,实现在相互追踪运行的列车间传输运行状态信息,继续保证列车安全运行的功能。该列车通信系统只需在原有车载子系统的基础上加装北斗终端来收发包含列车运行状态信息的短报文即可。它不仅能为列车间通信提供一种新的方法,而且由于无需建设额外的地面设备,大大降低了系统建设成本。
CTCS-3;北斗短报文;列车通信系统;北斗终端
信号系统是轨道交通自动控制系统的核心,为保证列车的安全运行发挥了巨大作用。在现有的列车运行控制系统中,是通过轨道电路和GSM-R基站等地面设备在列车间传输运行状态信息的,这使得列车运行控制系统极大地依赖于地面信号系统,一旦地面信号系统发生故障,它就无法保证列车的安全运行。如2011年7月23日,由于雷击导致地面信号系统故障,致使甬温线上发生重大列车追尾事故,造成了巨大人员伤亡和财产损失。此时,若是能为列车提供一种不依赖地面信号设备就能实现列车间通信的渠道,完成列车间运行状态信息的交互,那么就能有效避免此类事故的发生。
1 CTCS-3列车运行控制系统
CTCS-3列控系统是一种基于无线通信的列车运行控制系统,包括地面设备和车载设备,如图1所示[1]。地面设备主要包括:①RBC(Radio Block Center,无线闭塞中心)能根据轨道占用情况及进路状态向所管辖范围内的列车发出行车许可和列车控制信息;②GSM-R基站用来完成车-地间双向、大容量的数据通信;③轨道电路用于轨道占用检测和列车完整性检查;④应答器用于传输各种线路数据、定位信息和临时限速信息。车载设备主要包括:①BTM(Balise Transmission Module)用于接收应答器信息;②STM(Specific Transmission Module)用于接收轨道电路信息;③列车测速模块用于检测列车的实时速度,计算列车走行距离并结合应答器信息进行列车定位[2];④车载安全计算机用于对输入信息进行综合逻辑运算,并生成目标距离模式曲线来控制列车运行;⑤GSM-R无线通信模块用于发送列车的运行状态信息,接收行车许可和其他控制命令。⑥人机界面用于向司机显示列车的运行状态信息和报警信息等。
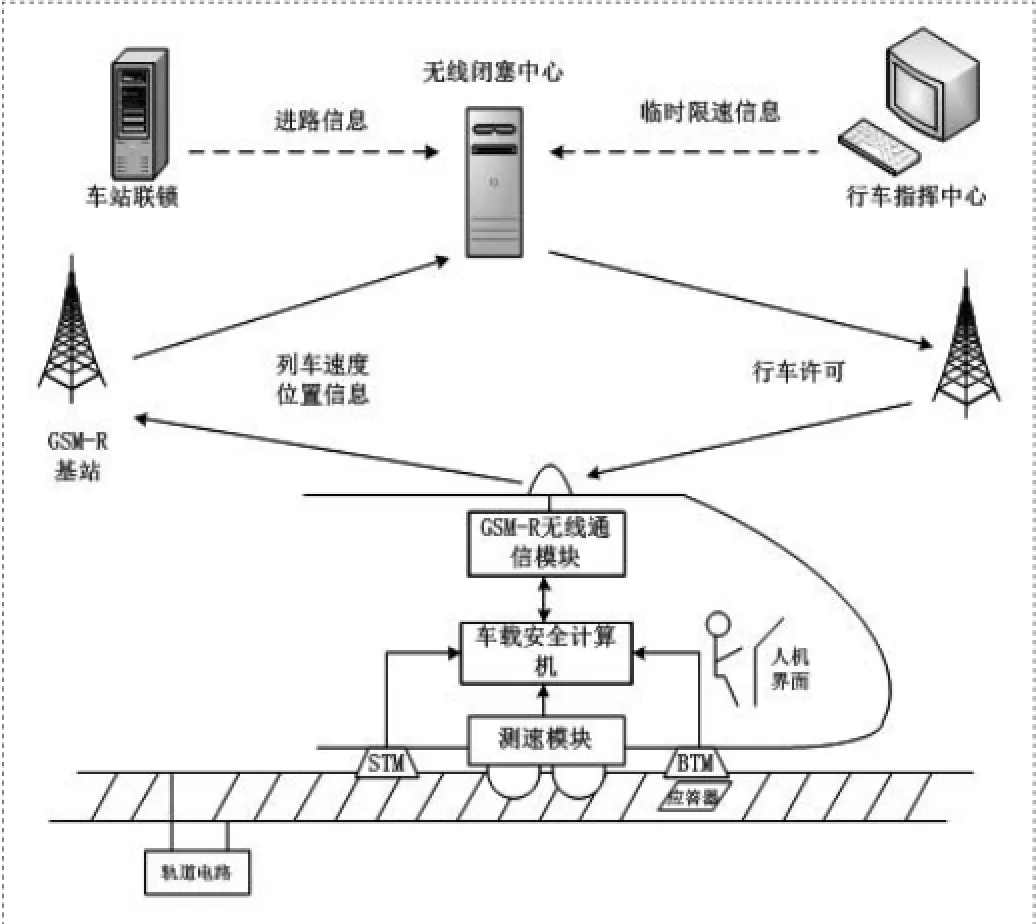
图1 CTCS-3列车运行控制系统结构
CTCS-3列控系统工作原理:列车通过GSM-R无线网络向RBC发送列车位置和速度等信息,RBC根据车载设备发送的信息,结合车站联锁的进路信息和列控中心的临时限速信息,计算列车追踪距离,通过GSM-R无线网络向列车发送行车许可,实现对列车运行的闭环控制。列控中心还能对列车运行状态进行实时监控,向列车下达相应的调度命令,并根据车站联锁的进路信息和临时限速信息控制有源应答器和轨道电路发码,从而实现信息的传递。
由以上分析可知,现有的列控系统极大地依赖于地面信号系统的完整性。当地面设备瘫痪时,为了确保安全,列车将不得不降速运行,甚至紧急停车,直到故障排除为止,这势必会影响线路的运行效率。
2 北斗卫星导航定位系统
截至2012年底,我国的“北斗二代”已经覆盖了亚太地区,到2020年左右,中国将累计发射30余颗北斗导航卫星,建成覆盖全球的北斗卫星导航定位系统[3]。目前,北斗二代卫星导航定位系统的定位精度可达10m,测速精度可达0.2m/s。除了具有与GPS相同的定位、导航和授时功能外,它还保留了“北斗一代”的通讯功能,能在公共通讯网络中断、没有其他卫星通讯的情况下,继续为用户提供通信服务[4]。
北斗终端按照不同的业务服务模式,可分为RDSS终端和RNSS终端;按照用途可分为导航型终端、测量型终端、定时型终端和位置报告/短报文型终端。其中,RDSS终端可提供定位、导航、授时、位置报告和短报文通信的全部或部分功能。指挥管理型终端是指利用北斗RDSS业务接收其下属用户的定位信息和通讯信息的多用户地址码,一般具有用户信息管理、通播、组播、单播、查询、调阅、指挥调度和管理功能。
3 北斗短报文工作原理
北斗卫星导航定位系统不仅能像GPS一样进行无源定位(即被动接收卫星发来的信号),还能实现有源定位,在用户终端之间以及用户终端与指挥管理型终端之间提供每次最多120个汉字的短报文通讯服务,每个终端都有唯一的ID号,且短报文通信都需要经过地面中心站来进行转发[5]。
如图2所示,北斗短报文的通信流程可以分为5个步骤:①发送方终端(如用户1)从北斗卫星接收到符合NMEA-0183标准的导航电文,并对报文进行解析获得该终端的位置、速度等信息;②发送方终端将包含发送方ID号、接收方ID号、位置信息和其他表示特定含义的通讯申请信号进行加密后通过卫星转发给地面中心站;③地面中心站接收通讯申请信号;④地面中心站对接收到的通讯申请信号进行解密、处理和再加密后,再将通讯申请信号加入到出站广播电文中,经卫星广播给接收方终端[6];⑤接收方终端接收出站信号,并对出站电文进行解调、解密,从而获取短报文通讯信息,至此就完成了一次短报文通信。
接收方终端在接收到短报文信息时,还应及时发出视觉、声响等提示信息,并在用户终端上显示出报文发送方ID号、发送时间、发送方位置信息和其他表示特定含义的报文信息。

图2 北斗短报文工作原理
4 基于北斗短报文的列车通信系统
如图3所示,基于北斗短报文的列车通信系统能独立于现有的地面信号系统进行工作,通过车载子系统对列车的各种运行状态进行实时采集,将这些信息按指定格式封装成数据包,再以短报文的形式发送给同线路、同方向追踪运行的相邻的列车,使后行列车能实时掌握前行列车的运行状态[7]。
该数据包中应包含以下信息:前行列车用户终端ID号、前行列车车次号、后行列车用户终端ID号、后行列车车次号、报文发送时间、前行列车的速度、前行列车的坐标信息、坐标信息对应的线路公里标数据、列车的运行方向和数据包校验信息。
后行列车对接收到的数据包进行拆封、校验后,得到前行列车车次号、运行速度和前行列车在线路上所处的公里标位置信息,然后将前行列车的速度和位置信息输入车载安全计算机来计算与前行列车之间的距离和目标距离模式曲线,并按照目标距离模式曲线对本列车的运行速度进行监督和调整。当列车运行速度超过目标距离模式曲线所规定的速度时,及时发出警报来提示司机采取相应的制动措施,从而保证列车的安全运行[8]。
此外,在行车指挥中心还设置了一套指挥管理级的北斗定位终端,其作用在于:①接收管辖线路上所有列车发送的包含运行状态信息的短报文,实现对线路上所有列车运行状态的实时监控;②当列车发生故障或其他紧急事件时,接收列车发送的求救信息;③向指定列车发送包含临时限速命令、调度命令和其他控制命令的短报文信息来实现行车指挥中心对线路上列车的控制和调度功能。
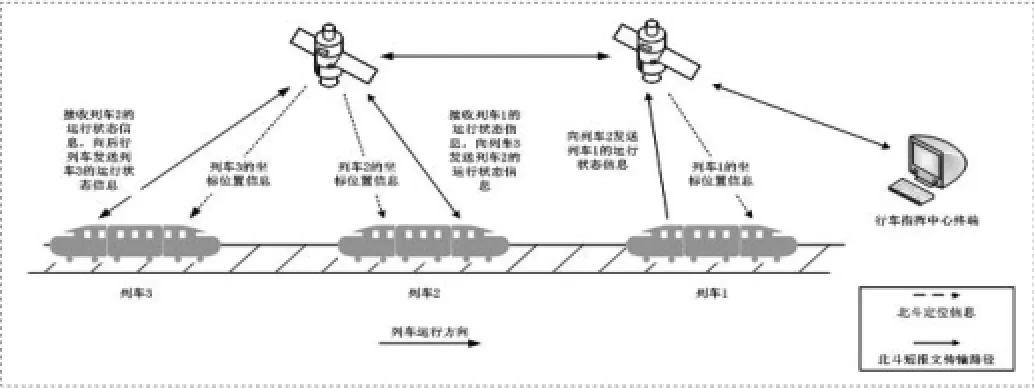
图3 基于北斗短报文的列车通信系统工作原理
5 结语
本文提出的基于北斗短报文的列车通信系统能够在没有地面信号系统的情况下,解决列车之间以及列车与行车指挥中心之间无法通信的问题。通过收发包含列车运行状态信息的短报文,使后行列车与前行列车保持安全制动距离,从而保证列车追踪运行的安全和高效;同时,也使行车指挥中心能够掌握全线列车的运行情况,为列车调度和实施救援提供了便利。
北斗短报文通信目前还存在以下不足:
1)当卫星信号被遮挡时,就无法完成短报文的通信,因此该系统还只能作为车载子系统通信的备用方法;
2)与定位功能相类似,短报文通讯功能的传输时延约为0.5秒,通讯的最高频率为1Hz,离车载子系统对通信实时性的要求还存在一定差距。
[1]高云波.一种基于模糊逻辑的CTCS-3级列控系统越区切换算法[J].兰州交通大学学报,2014,33(6):27-32.
[2]刘锋.基于通信的列车控制模式下的列车定位新技术[J].城市轨道交通研究,2012,15(4):48-53.
[3]刘基余.北斗卫星导航系统的现况与发展[J].遥测遥控,2013(3):1-3.
[4]中国卫星导航定位协会.卫星导航定位与北斗系统应用[M].北京:测绘出版社,2015.
[5]黄颖,唐小明,黄水生,等.林业野外巡护采集信息北斗短报文编码设计及应用[J].中南林业科技大学学报,2014,34(8):107.
[6]谷军霞,王春芳,宋之光.北斗短报文通信信道性能测试与统计分析[J].气象科技,2015,43(3):458-463.
[7]张炯韬.北斗卫星导航系统在铁路应急通信中的应用研究[J].铁路通信信号工程技术,2013,10(6):11-12.
[8]杨厅.使用北斗短报文通信的列车防追尾系统.[P].中国专利:CN205365641U,2016-07-06.
