图像特征点描述子综述
2016-10-21宋俊芳闻江
宋俊芳 闻江
摘 要:局部图像特征描述是计算机视觉的一个基本研究问题,在寻找图像中的对应点以及物体特征描述中有着重要的作用。本文简要介绍在机器视觉发展过程中常用的图像特征点描述子,并展示各特征描述子在同一图片中的检测结果,分析它们的特点及优缺点。
关键词:计算机视觉;特征点描述子;检测结果
中图分类号: TP391.4 文献标识码: A 文章编号: 1673-1069(2016)21-158-2
0 引言
图像特征点描述子是很多实际应用的基础,在多幅图像的配准利用多幅二维图像进行三维重建、恢复场景三维结构,这些应用在建立图像之间点与点之间的对应关系通常都依赖于一个优秀的局部图像特征点描述子。尤其是近年来对复杂场景冲目标跟踪的应用中,基于目标图像特征点的跟踪能够有效解决目标被遮挡、形变等比较复杂的情况,受到越来越多研究者的关注。
1 第一类图像特征点描述子
1.1 SIFT
SIFT(尺度不变特征转换),此算法由David Lowe在1999年所发表,2004年完善总结。是一种计算机视觉的算法,用来侦测与描述影像中的局部性特征,它在空间尺度中寻找极值点,并提取出其位置、尺度、旋转不变量。自它提出以来,很快在物体识别、宽基线图像匹配、三维重建、图像检索中得到了应用,局部图像特征描述子在计算机视觉领域内也得到了更加广泛的关注,涌现了一大批各具特色的局部图像特征描述子。
1.2 SURF
SURF(加速稳健特征)是Hebert Bay在ECCV2006年提出的SIFT算法加速版,在适中的条件下完成两幅图像中物体的匹配基本实现了实时处理。它的速度是SIFT的3-7倍,大部分情况下它和SIFT的性能相当,因此它在很多应用中得到了应用,尤其是对运行时间要求高的场合。
1.3 BRISK/SBRISK
BRISK(二进制鲁棒的不变尺度关键点),是ICCV2011年提出的图像特点点描述子,2014年提出加速版SBRISK。它具有较好的旋转不变性、尺度不变性及鲁棒性。在对有较大模糊的图像配准时,BRISK算法在其中表现最为出色。
1.4 KAZE/AKAZE
KAZE是ECCV2012提出的一种比SIFT更稳定的特征检测算法,KAZE的取名是为了纪念尺度空间分析的开创者——日本学者Iijima。KAZE是日语‘风的谐音,寓意是就像风的形成是空气在空间中非线性的流动过程一样,KAZE特征检测是在图像域中进行非线性扩散处理的过程。AKAZE 是加速版KAZE特征,即Accelerated KAZE Features。
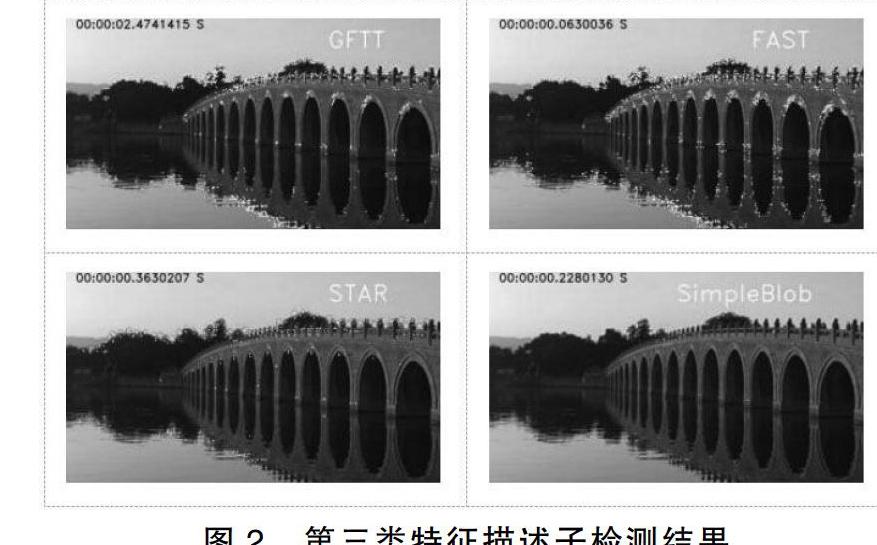
1.5 检测结果
其中,图1左上角原图为1920*1080的高清图像,从检测结果可以看出,第一类图像特征点描述子中,BRISK是速度最快的,在时间效率上依次是BRISK>SURF> AKAZE>SIFT>KAZE,SURF则是特征点最丰富的。
2 第二类图像特征点描述子
2.1 MSER
MSER(最大稳定极值区域)是一种用于在图像中进行斑点检测的方法。这个方法由Matas等人于BMVC2002年提出,用于在两个不同视角的图片中寻找对应关系。这种方法从图像中提取全面的元素对应关系,有助于宽基线匹配,以及更好的立体匹配和物体识别算法。该特征点描述子在具有相同阈值范围内所支持的区域才会被选择;无需任何平滑处理就可以实现多尺度检测,即小的和大的结构都可以被检测到。
2.2 ORB/ORBSLAM
ORB(ORiented Brief)是ICCV2011年提出的新的特征点描述子, 它是在BRIEF基础上引入了方向的计算方法,并在点对的挑选上使用贪婪搜索算法,挑出了一些区分性强的点对用来描述二进制串。主要解决了BRIEF在噪声敏感、旋转不变性方面的问题。BRIEF (Binary Robust Independent Elementary Features) 则是ECCV2010年提出,利用局部图像邻域内随机点对的灰度大小关系来建立局部图像特征描述子,得到的二值特征描述子不仅匹配速度快,而且存储要求内存低,因此手机应用中具有很好的应用前景。优点在于速度,缺点也相当明显:不具备旋转不变性;对噪声敏感;不具备尺度不变性。ORBSLAM是2015年提出的比较完备的单目slam算法,主要是一个基于特征点地图的应用。它对关键帧做了半稠密场景重建。
2.3 检测结果
检测结果显示,MSER、ORB特征描述子均有很高的检测效率,相对于第一类特征描述子,更容易满足对于实时性要求高的应用,在特定的場合应用中,这两类描述子应用广泛,例如在点匹配的目标跟踪上,由于帧率的高速,目标在当前帧和下一帧中的尺度变化很小,利用ORB特征点来实现跟踪相对于其它所有特征点来说,具有不容忽视的巨大优势。
3 第三类图像特征点描述子
3.1 第三类特征点描述子总述
第三类特征点是一些不具有尺度变换或方向变换不变性的描述子,它们主要1994年提出的GFTT(Good Features To Track)、2006年FAST(Features From Accelerated Segment Test)、2008年Star,以及SimpleBlob特征点描述子等等。它们的提出时间都较早,随着对图像特征点描述子研究的深入,不少研究者在此基础上不断改良这些特征描述,提高它们的功能。当然,计算的时间复杂度也随之提高,在具体表现上,性能仍不及上述的第一类、第二类描述子。不过值得注意的是,它们的优势主要体现在运算速度上,在先验知识比较丰富的具体应用中,这些图像特征描述子在时间效率上往往占有极大优势。
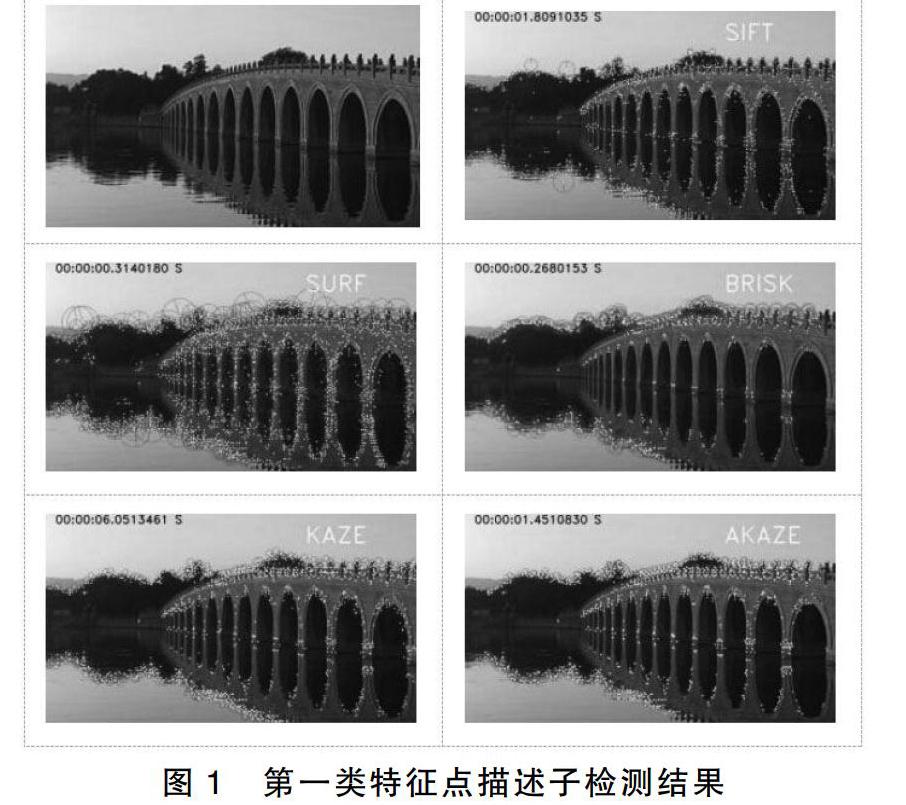
3.2 检测结果
图2检测结果显示,FAST特征点检测速度快,且数量丰富,SimpleBlob则数量稀少。GFTT以及STAR速度快,在特征点的跟踪上有着极好的性能。
4 总结
在实际应用中,根据不同场景的具体情况,不同的特征点都有不同的优势,例如第一类图像特征点描述子在对精度要求较高而不要求实时性的要求中表现出极好的性能;第二类特征描述子则在特定场合能够很好的协调精度与速度之间的关系;而第三类特征描述子则主要在时间效率上占有极大优势,适合于对实时性要求较高的场景应用。随着研究的不断深入,已有的图像特征点描述子不断的被改良,新的图像特征点描述子也不断被提出,在实际应用中也发挥着越来越重要的作用。
