新一代天气雷达风廓线产品的可用性研究
2016-10-21颜涛黄祖辉刘玲严雪娇
颜涛 黄祖辉 刘玲 严雪娇
摘 要:本文通过南昌单部多普勒雷达风廓线产品利用速度方位显示来计算得出各层高度中的风向风速的工作原理,利用VAD原理计算得出在非均匀流场中的风向、风速、辐散和形变信息,并与气球携带电子探空仪综合探测得到的各层高度中的风向风速的资料进行对比,来研究多普勒天气雷达风廓线产品的可用性,综合研究表明多普勒天气雷达风廓线(VWP)产品对天气预报、强天气识别、水文、航天等领域提供了重要的参考风资料。
关键词:风廓线;VAD;风场反演;综合探测风
新一代天气雷达是监测与预警灾害性天气的重要手段,多普勒雷达风场反演技术能提供回波区域风场信息,是研究灾害性天气和超短期预报有效的工具之一, 也对研究大气边界层起了重要作用。
新一代天气雷达﹙CINRAD/SA﹚风廓线产品即速度方位显示风廓线(表示号#48,标识符VWP),是利用VAD技术测量风场结构的原理,根据不同时刻的不同仰角同一距离或者不同时刻的同一仰角不同距离上的多普勒速度V(θ)分布资料,应用VAD技术就可以得到几个规定高度的平均风向风速,并说明了运用VAD技术测量风场的可用性和局限性。风廓线产品是速度方位显示(VAD)在各层导出水平平均风的垂直廓线。风被描绘于坐标格点上。X轴为时间,Z轴是高度,以km为单位,只显示最近11个体扫的数据,每个体扫可以显示30个高度层的风资料。这些用于显示的平均高度在UCP上选择,两层间的最小间隔必须大于0.3Km(约1000英尺),而最低层选择必须高于台站雷达拔海高度.高度可以选择到21Km,但高于14Km 的风场质量不是很高,它被推荐在雷达产品请求列表中。风场使用风羽图绘制,风向杆的长度总是相同。
南昌新一代天气雷达﹙CINRAD/SA﹚风廓线产品的选择的拔海高度分别为:0.3、0.6、0.9、1.2、1.5、1.8、2.1、2.4、2.7、3.0、3.4、3.7、4.0、4.3、4.6、4.9、5.2、5.5、5.8、6.1、6.7、7.3、7.6、7.9、8.5、9.1、10.7、12.2、13.7、15.2(单位为Km)。其中VCP21为降水模式,6分钟完成一体扫工作;VCP31为晴空模式,10分钟完成一体扫。研究表明多普勒天气雷达风廓线产品在雨天的可用性比较好,为风的观测又提供了一个重要参照值。
一、VAD技术测量水平风场原理
单部多普勒雷达通过VAD技术能探测降水区域风场的特征,VAD技术即速度-方位显示方法,让雷达天线以某一固定的仰角作为方位扫描,并把探测到的降水粒子在某一距离和方位上的径向速度记录并显示出来,如图所示。降水粒子的运动速度可分为垂直下落分量和水平量(恒为正值)。如果以正北方x轴的正向,正东方为y轴的正向,z轴向下为正,并令β0为水平风向与正x轴的夹角,β为方位角,a为天线仰角,则由图1可见,雷达探测的降水粒子的径向速度为:
按照公式(1)和实际流场的均匀与否,可以探测风向、风速、辐散辐合,形变等物理量。
若流场均匀,则由(1)式可知,当仰角a 不变时,雷达测得的某一固定距离上的径向速度υR(β)将按余弦方式变化,而且叠加一个常数值(见图2)。当雷达天线指向水平风速的方向时,因,故有
即径向速度取极大值,当天线指向下风方向时,β=β0,径向速度取极小值。
比较上面两式,可以解出被探测高度上的水平风速,即
而水平风的来向,就是雷达径向速度极小值时天线指向的方位角。
粒子的平均下落速度也可由(2)和(3)两式解出,为
此即为垂直方向的平均多普勒速度,再采用的前面介绍的方法就可以进一步导出大气垂直速度和雨滴譜分布。
二、测量非均匀流场的风向,风速、辐散和形变
当水平风场不均匀时,则VAD曲线将不是余弦曲线形式,实际上在前面的方法中并未应用曲线的全部信息,只用了曲线的极值和零点。而VAD曲线的非简谐振荡形式提供了水平风场更多的信息。对VAD曲线作谐波分析,应用傅氏级数的零次,一次和二次谐波展开,可以得到水平辐合、水平风向和风速以及水平风场的形变等信息。
三、速度方位显示(VAD)
速度方位显示产品在业务上虽然不是很常用,但它有两方面重要的作用:用于速度方位风廓线(VWP)产品和环境风表中,所以明白速度方位显示产品是很重要的 。
1.算法
速度方位显示(VAD)产品是用于离散的数据点资料,计算各给定高度层上的风速大小和方向。具体算法如下:
(1)使用同一斜距和单一仰角的资料计算VAD风场。对于VAD风廊线要求的每一个高度层,VAD算法选择最靠近VAD区域(30千米,适配参数)相交的仰角。实际的斜距会随要计算的VAD风的高度而变化。
(2)将每一个方位角上,250米分辨率的基速度资料点绘在一张图上。
此图上x轴为方位角(0°/360°为北方,180°为南方)Z轴表示速度(正的顶部为向外速度,负的底部向内速度)。
(3)如果此图上点绘了25点以上的资料,算法计算拟合相应资料的正弦曲线(使用最小二乘法),再从正弦曲线中计算出VAD风。正弦曲线的振幅用于估计风速,正弦曲线向内部分(接近图形的底部)估计风向。
(4)对称性和均方根误差两附加值的计算:对称性是VAD坐标系统中速度零线与正弦波中线二者的差。如果对称性为负(中性低于零线)向内的风大于向外的风,表明雷达附近为辐合气流。如果对称性为正,向外的风大于向内的风,雷达附近为辐散气流。均方根误差;由点绘的探测曲线资料计算得到。RMS可以作估计风的可信度参数。
如果对称性超过13.65kft(4.41528km) ,或均方根误差超过9.7kft(2.95656km)(适配参数),操作员或以用点绘的正弦曲线确定风扬,但此风扬不能作为VAD风廊线(VWP)产品输出。
2.风廓线产品简介
风廓线 VWP产品(#48产品)数据层展示速度方位显示VAD风场的均方根误差,KTS(或m/s)为单位。第一数据层均方根误差小于4 KTS(约1.6m/s),第二数据层均方根误差4~7 KTS(约2.8m/s),第三数据层均方根误差8(约13.2m/s)~11 KTS(约23.2m/s),由于均方根误差超过9.7 KTS(约4m/s)时,VWP产品层上将显示“ND”(无资料),所以对于更高的数据层, VWP产品不会再显示。
有三种情况:风廓线 VWP产品层上将显示“ND”;少于25个资料点;均方根误差超过9.7 KTS(约4m/s);对称性13.6KTS(约5.5m/s);以上数据由适配参数控制。
3.速度方位显示风廓线(VWP) 产品的局限性
(1)所需的测量值在编码所需的VAP高度上,至少需要25点的数据资料;
(2)如果均方根误差或对称性超过门限值,不再对风场进行编码。并将显示无资料“ND”;
(3)通常只显示RDA40Km范围内的风场;
四、多普勒天气雷达风廓线与探空综合测风
1.多普勒雷达风廓线产品
单部多普勒天气雷达测量风场的一种方法,称为VAD(Veloccity-Aximuth-Dispitay)技术。VAD方法对雷达的探测方式要求比较简单,天线以某固定仰角作方位扫描(即作圆锥扫描),可探测到某固定距离内不同方位上多普勒速度,多普勒速度不但和所在高度上的水平速度和垂直速度有關,还和雷达的方位角和仰角有关。在风场一致性和各向同性的假设条件下,对某一距离上不同方位角测得的径向速度数据作谱宽分析,应用傅里叶级数的零次、一次和二次谐波分析展开,可以得到在水平风场符合线性分布条件下的平均风向风速。
在上述VAD产品基础上,应用体积扫描资料,根据式(其中R是斜距,α是雷达体扫仰角,r是水平区域半径),可得到半径为30Km的水平区域在不同高度上的风向风速,从而得到平均风向风速随高度变化的垂直廓线。用用相继时间的体扫资料,即可获得平均风向和风速随高度和时间变化的剖面图形。VAD风廓线产品是用不同时刻VAD算法导出的各个高度上水平风用风标表示在同一幅图上而成,横坐标表示时间,纵坐标表示高度,以km为单位,最大可包含30个高度。图形与一般天气图的风向风速表示方法相同,同时也可配上不同色调表示均方根值或回波强度值。
2.探空综合测风
探空测风雷达通过跟踪自由上升气球携带的探空仪在空间的移动轨迹,对其进行定位,从而测得每分钟探空仪相对雷达的仰角、方位角和斜距;利用两个计算分钟点的角度和距离数据,可计算出这两个计算分钟点的中间时刻的量得风(水平平均风向和风速)规定高度层矢量风的算法是,从探空气压、温度、湿度记录的时间-高度曲线上查算每个高度所对应的探测时间,将与其相邻的上、下两量得风层中内插,计算后得到该高度的水平平均风向和风速。
3.多普勒天气雷达风廓线与探空综合测风资料的对比
在比较两种不同测风方法的探测结果时,应当充分考虑它们的测量原理,计算方法、数据的时间和空间代表性,以及天气状况等诸多因素,使对比条件和环境尽可能接近。基于以上几个方面的考虑,文中选择符合条件的一些测风资料进行对比。
(1)资料取样、处理和对比。2003年6月13~14日受高空低槽东移和中低层切变影响,江西多个台站出现大到暴雨,南昌13日07时~14日07时累积降水量70.7mm;其中13日13~14时降水量6.1mm,且一直维持云量10/10的层积云。将南昌探空站13日14时次L波段探空雷达加密观测得到的风资料和同一时段的南昌多普勒雷达(VCP21模式)风廓线产品进行比较,两部雷达相距100m左右,高度采用多普勒雷达风廓线产品(VWP)上的规定高度,多普勒雷达风廓线产品的取值时间用探空观测同一规定高度的时间为准,不同步时用靠近法代替。具体对比情况如表2(高度、风向、风速的单位分别为米、度、米/秒,差值为多普勒雷达观测值减探空观测值)。
(2)多普勒天气雷达风廓线(VCP21)与探空综合测风资料的对比。从表2可以看出由于受明显天气过程影响,雷达周围有大面积稳定性降水回波,南昌多普勒雷达(VCP21模式)风廓线产品数据的层均方根误差较小。统计从300m到9100m高度26组样本后发现,除第一层外,每层风向差值不大于10°、风速差值不大于3m/s,云层比较密,回波较强的4000~6700m高度层的对比资料几乎重合。其中,多普勒雷达风廓线产品风向平均值228.85°,风速平均值12.46m/s;探空风向平均值228.19°,风速平均值12.69m/s;风向平均差0.66°,风速平均值差-0.23m/s。以上的对比结果可以发现两者基本吻合。
(3)多普勒雷达(VCP21模式)风廓线在晴天的可用性研究。2014年12月1日08时,晴天,南昌多普勒雷达VCP21模式工作,多普勒雷达风廓线产品与同一时段的探空资料对比结果,从表3中可以看出几乎没有可比性,即南昌多普勒雷达(VCP21模式)风廓线在晴天几乎没有可用性。
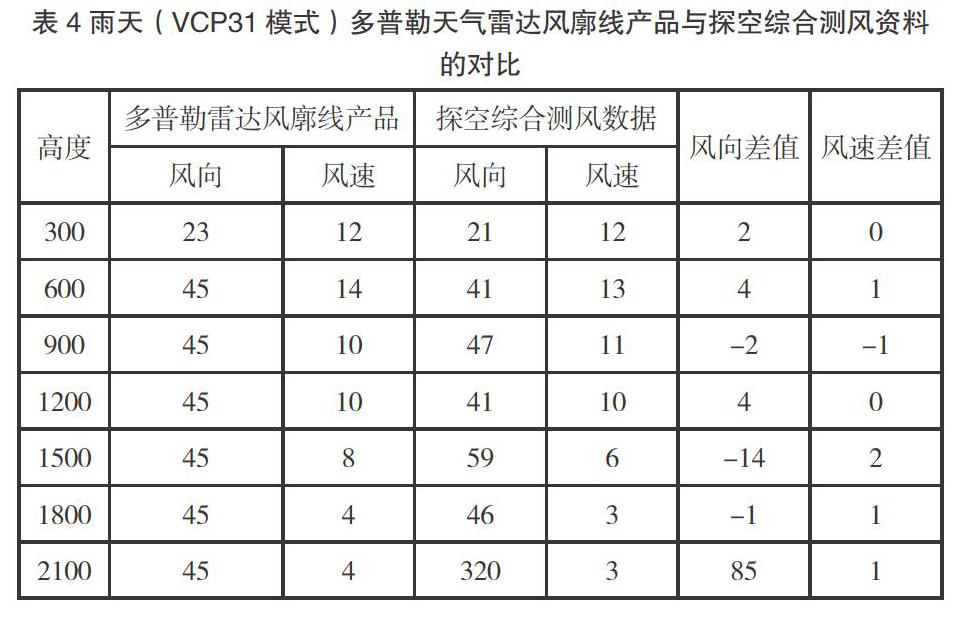
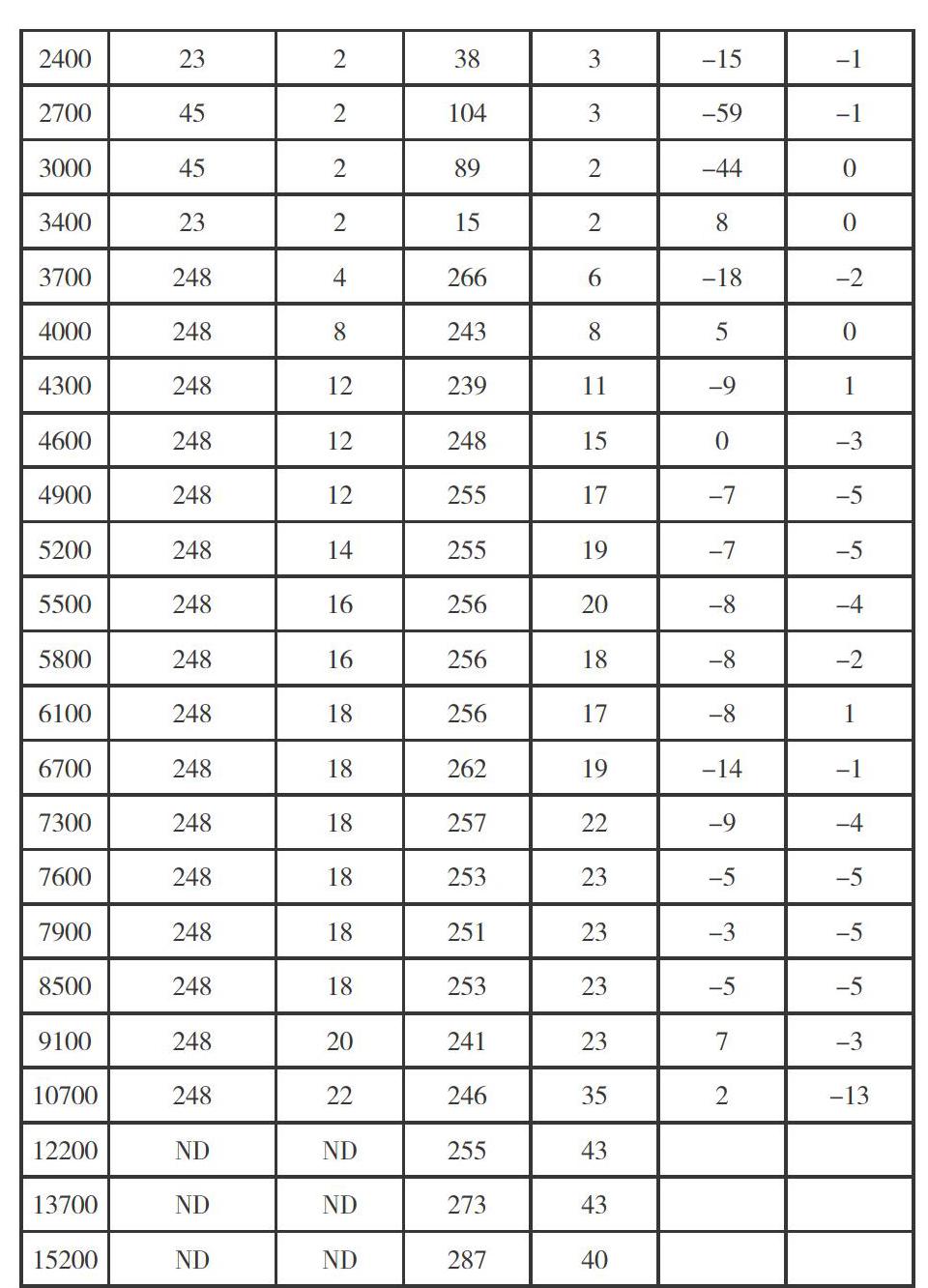
(4)多普勒天气雷达风廓线晴空模式(VCP31)与探空综合测风资料的对比。2013年11月11日08时,雨天状况进行对比,多普勒天气雷达风廓线晴空模式(VCP31)工作。多普勒雷达风廓线产品与同一时段的探空资料对比,从表4可以看出:从300m到9100m风速差值都不是很大,多普勒天气雷达风廓线大部分偏小,其中5个高度层偏小5m/s,最后10700m偏小13m/s,几乎没有用,风向在风速10m/s时以上时只有6700m偏小14°,其它的都在10°以内;风速小时有时偏差比较大,其中2100m的偏差最大达85°,1500m、2400m、2700m、3000m、3700m都偏差比较大。但近地面层可比性比较好,总体可用性比较好。
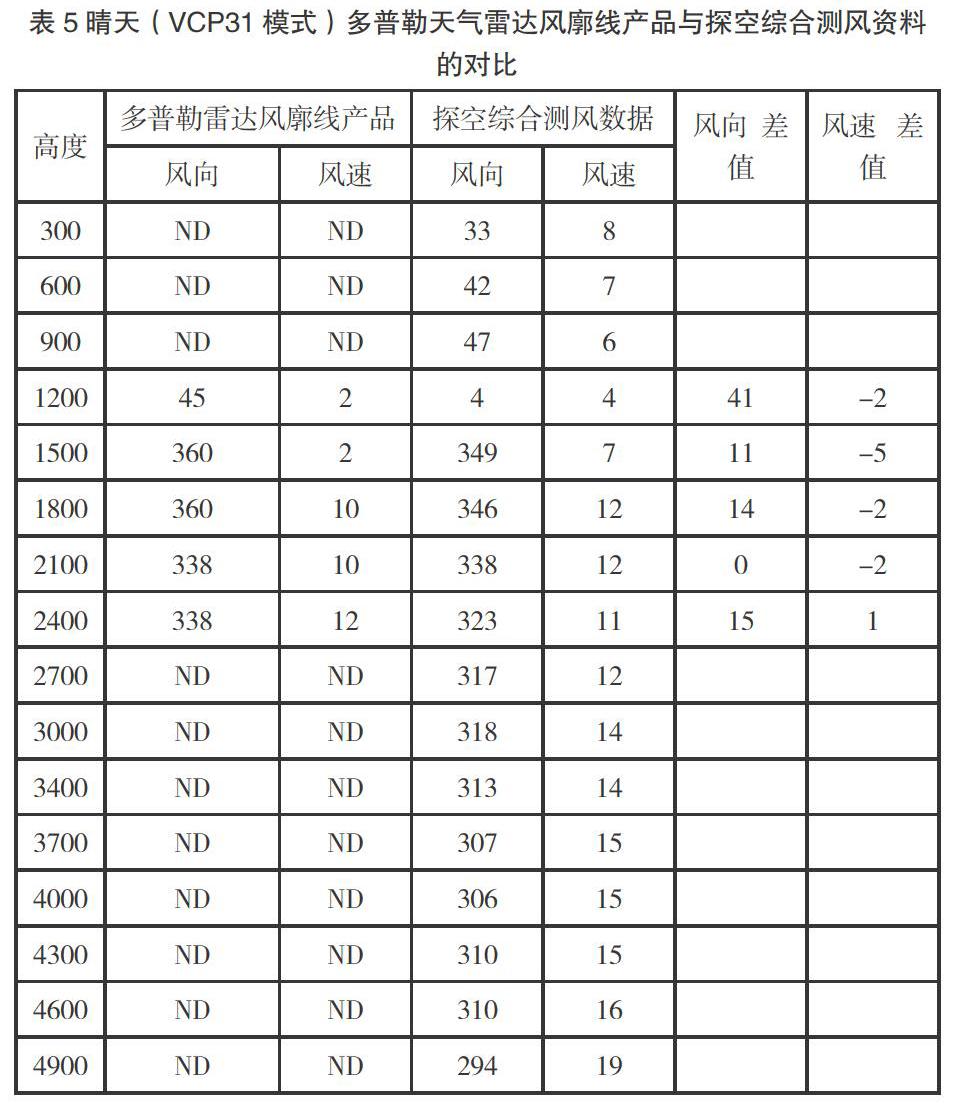
2013年11月17日08时,天气晴朗,多普勒天气雷达风廓线晴空模式(VCP31)工作。多普勒雷达风廓线产品与同一时段的探空资料对比,从表5可以看出:晴空模式(VCP31)多普勒雷达风廓线产品在晴天也没有很大可比性,即风廓线产品没有多大利用价值。
4.误差原因分析
多普勒雷达和探空两种测风方法的探测资料是在特定的天气条件下得到的,在某些高度层,两者还存在着一定偏差。主要原因为:
(1)多普勒雷达风廓线产品受残余地物回波影响,近地层风的可信度比较差,如表1中300m高度处和探空测风结果的差值最大。降水粒子稀少或一些外来信号(如大批飞鸟)干扰,也会导致风廓线产品某些高度上的风资料失真。
(2)两种观测的高度算法不一样。多普勒雷达是用斜距乘以sinθ(θ为雷达仰角),加上地球的曲率、大气折射等订正后得到;探空则采用压高公式计算各相邻两气压层间的厚度,并从下而上累加而得出高度;另外,两种观测的采样时间用的是靠近法,不可能完全同步。
(3)风的表示方法不同,多普勒雷达风廓线和天气图一样采用风羽法表示,风向只有16个方位,风速分辨率为2m/s,本身就存在不小的误差。而探空测风采用360个方位角表示风向,风速精确到1m/s,因此两种探测方法得到的结果必然会有误差。
(4)多普勒雷达是在以半径为30Km的水平区域中各规定高度层上采用25个以上资料点反演出平均水平风向风速;探空则以一个点(探空仪)的运动轨迹计算出的风资料代表某一高度平均风向风速,探空仪相对探空雷达的漂移可能超过100Km,这样也会造成多普勒雷达风廓线和探空综合测风结果的结果存在误差。
(5)当风场一致性和各向同性条件差时,如:中小尺度系统扰动及高空槽、脊過境,会导致多普勒雷达风廓线风场的起伏及数据失真等,造成风廓线产品的数据误差较大。多普勒雷达测得某一高度层风场一致性好,回波资料的点数越多,该层风资料越真实;反之,经VAD技术计算后,其均方根误差大于阙值(5m/s)或对称度大于阙值(25Km),或者少于25个资料点,几乎完全得不到垂直风廓线,风资料将不再显示(用“ND”代替),如表1中9100m以上风廓线资料,这样测风就结果带来误差。
五、多普勒天气雷达风廓线与探空综合测风对比结论
综上所述,多普勒天气雷达风廓线与综合探测风的对比可以得出以下结论:
1.产品的测量机理不同,探测的空中目标也存在一定的差异,但在风场一致性和各向同性条件满足时,比较两者在同一地点和相近时间的水平平均风向风速测量,发现两种产品具有很好的一致性。
2.探空测风是在整个飞行路径上采样,探测时间长,且不同时间对应不同高度的平均风,时间分辨率低;但测量结果很少受天气特性的影响,因此,其最大探测高度有保证。而多普勒雷达测风受回波特性的影响明显,在风场不符合“各向同性”条件时,会有的很大误差,在气象目标不满足条件时,探测高度有激烈起伏;但多普勒雷达测风是在不连续点上的同时采样,同一时间可得到不同高度风廓线,所以时间分辨率高。
3.多普勒雷达是直接测量方法,与探空测风方法相比,具有实时性强,时空分辨率高,长期使用费用低廉,可连续提供风场分布等优点。多普勒雷达风廓线产品具有较高的应用价值,比如:产品作为多个连续体扫描的水平风垂直廓线显示,有助于预报员了解对流天气的风场随时间的变化:航空气象人员常用它来识别平均风的高度切变,特别是低空风切变:通过了解水平风场随时间的变化,可监控冷空气、锋面等的移动情况,以指导常规天气预报。另外,有时候利用该产品还能估计出云顶,云底的高度及降水回波的移向、移速。
4.多普勒雷达风廓线产品弥补了探空资料站点稀、时次少的不足,能及时了解测站上空环境风场的垂直分布,有利于提高短时预报员服务质量。
六、多普勒天气雷达风廓线产品的可用性分析
多普勒天气雷达能提供反射率、径向速度、速度谱宽等数据,在此基础上可以进一步反演得到风场、降水等的空间分布情况,由于体扫间隔的时间短,且为连续运行,因此,能获取探测区域内风随时间和空间的变化;相对传统的探空测风而言,多普勒雷达风廓线产品有一定的优势。
多普勒天气雷达风廓线与探空综合测风都能获取风场随高度的变化分布,这是两者的相似之处;但也存在着差异,受体扫空间的限制,多普勒雷达风廓线产品只反映特定区域内的风场分布;探空测风受气球施放时间的限制和气球随风漂移等因素的影响,得到的单站垂直高度风场分布有一定的误差。两者结合使用,可能在很大程度上减小或消除测风误差。
七、结语
文中以VAD技术为切入点对多普勒天气雷达风廓线产品及其原理进行研究,通过与L波段探空雷达观测资料时间和空间上的对比得出多普勒雷达的可行性:
1.产品所跟踪目标和测量的原理是不同,多普勒天气雷达通过大气中降水粒子对电磁波的散射作用,根据多普勒效应测量不同方向上的径向速度,在一定的假设条件下,利用反演技术,能得到降水回波中各高度上的水平平均风向和风速。探空综合测风是传统的测风方法,是利用探空雷达跟踪自由上升气球下的仪器、依据气球的水平运动分量随风向和风速而改变的原理探测的。
2.探空测风是在整个飞行路径上采样,得到整个空中风场的时间长,且不同时间对应不同高度区域空间的平均风,时间分辨力差;但测量结果很少受天气特性的影响,因此,其最大探测高度有保证。而多普勒雷达测风受回波特性的影响明显,在风场不符合“各向同性”条件时,会有较大的误差,在气象目标不满足条件时,探测高度有激烈起伏;但多普勒雷达测风是在不连续点上的同时采样,同一时间可得到不同高度风廓线,所以时间分辨力高。
3.多普勒雷达风廓线产品弥补了探空资料站点稀、时次少的不足,使预报员能及时了解测站上空环境风场的垂直分布,有利提高短时临近预报服务质量。
4.多普勒雷达风廓线产品和探空测风二者可互为补充,在风场一致性和各向同性条件满足时,比较两者在同一地点和相近时间的水平平均风速风向测量结果,发现两种产品具有很好的一致性和可比较性。从而为探测、预报人员提供更科学准确的风场时空分布信息。
参考文献:
[1]夏文梅,陈楠,程婷,等.降水过程中多普勒天气雷达风廓线产品特征[J].气象,2008.
[2] 余小鼎,迎春,陈明轩,等.新一代天气雷达与强对流天气预警[J].高原气象,2005.
[3] 曹俊武,高仲辉. 多普勒天气雷达与风廓线雷达测风比较,雷达科学与技术2013(6).
[4] 张培昌,杜秉玉,戴铁丕 编著.雷达气象学. 气象出版社, 2001.
[5]余小鼎,姚秀平,雄延南,等.新一代天气雷达与应用讲义[M].中国气象局培新中心,2004:
