基于运动图像序列的视野区域追踪思路及应用简述
2016-10-21詹家鳍语梁晨辉黄凯鑫
詹家鳍语 梁晨辉 黄凯鑫


【摘 要】数码拍摄设备有时被限制在低分辨率下以单色成像,希望实现在此条件下对视野区域低速运动方向的判断。构建两条思路:一,各个像素点的灰度随时间变化情况之间进行横向比较;二,每相邻帧图像之间进行纵向比较。
【关键词】单色成像;灰度对比;分布匹配
一、背景介绍
数码摄像技术被广泛使用于多种场合中。有时由于客观条件的限制,拍摄设备只能在较低的分辨率下单色成像(通常是黑色)。假设成像的分辨率为32×64,成像方式是将整个矩形视野划分成32×64个相同大小的矩形格子,图像中每个像素的取值为对应格子的亮度平均值。每间隔一段时间拍摄一帧图像,拍摄的画面体现为图像的序列。如果视野区域向某个方向缓慢移动,拍摄的画面实时地传输进电脑,有时需要在尽量短的时间内判断视野的移动方向。
二、思路构建
提出两种不同方向的思路:
思路一:各个像素点的灰度随时间变化情况之间进行横向比较
假设获取了n个连续帧的图像,那么对于视野中包含的32×64=2048个像素点来说都分别有一个长度为n的“灰度序列”(序列中的数都是0~255之间的整数),每个序列描述的是对应像素点在n个帧的时间中离散的灰度变化。
考虑到要“使用尽量少的时间”,模型求解时优先考虑只使用两帧图像来判断方向的情况,如果不可以保证精确度,则逐渐增加n的取值。
思路二:每相邻帧图像之间进行纵向比较
如果视野区域向一个方向移动,那么初始帧下图像某一部分像素点的灰度分布会与之后每一帧图像中沿着视野运动方向的那一部分的像素点的灰度分布相似(因为同一物体在时间上先后经过这些像素点)。
假设认为通过n张连续帧的图像来判断视野区域运动方向是可靠的,考虑到时间效率不妨先取n=2(如果不可以保證精确度,则逐渐增加n的取值),此时的模板区域大小是5×5。在初始帧图像中将它的位置放在整个32×64的区域中间,此时对应着初始灰度分布情况。第二帧图像中模板在分别移动到上、下、左、右、左上、左下、右上、右下这八个方向时都对应着一种新的灰度分布,哪一种和初始灰度分布最相似,就将这种灰度分布对应的方向取作视野区域运动方向。
三、应用简述
下面将以上面五张图为例大致说明两种思路的应用方法(视野在向右方向移动)。
思路一:
使用前四帧图像。在第一帧图像中取一块5×5的区域并以(3,3)为参考点。
下方左表为25个像素点在四帧时间内相邻帧两两进行灰度对比的对比序列;右表为除参考点外的其它24个像素点与参考点的灰度序列的距离(定义此距离为最简单的每一帧灰度平方和开根号)。
可以看出,(3,5)与(3,3)距离显著的最小。所以方向(0,2)就是视野区域的移动方向,即向右移动,与事实相符合。
思路二:
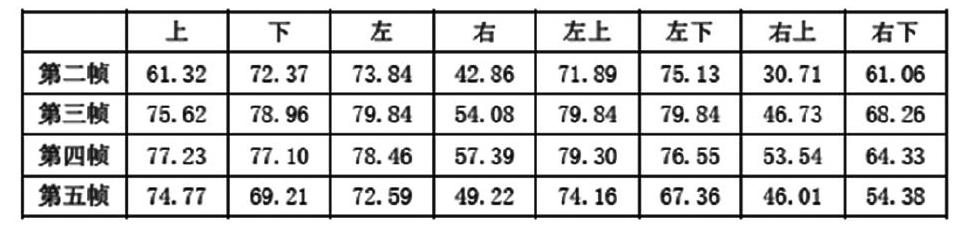
使用五帧图像。以[(30,30),(32,32)] 的5×5区域为模板,其在第二、三、四、五帧与八个标准移动方向的整体块灰度差异系数(定义此差异系数为最简单的每个像素灰度差的平方和开根号)如下表。
可以看出,尽管利用了五帧的信息,但是却无法转却判断运动方向。故此方法虽计算量很轻简,理论上也完全可行,但在实际操作中稳定性比较低,需要进行调整。
参考文献:
[1]葛永新.图像匹配中若干关键问题的研究[D].重庆大学,2011.
[2]方明.空间运动图像序列目标追踪方法研究[D].北京邮电大学,2014.
