铯光泵磁力仪测频方法的研究和实现*
2016-10-21卞骁炜李醒飞李立杨颖
卞骁炜,李醒飞*,李立,杨颖
(1.天津大学精密测试技术及仪器国家重点实验室,天津300072;2.天津职业技术师范大学自动化与电气工程学院,天津300222)
铯光泵磁力仪测频方法的研究和实现*
卞骁炜1,李醒飞1*,李立1,杨颖2
(1.天津大学精密测试技术及仪器国家重点实验室,天津300072;2.天津职业技术师范大学自动化与电气工程学院,天津300222)
铯光泵磁力仪需要通过测量磁共振频率换算得到被测磁场值。以全同步测频方法为基础,提出一种改进的测频方法,并进行了误差分析。通过判断连续两次测量中的被测信号周期个数是否一致对计数值进行处理,二者一致时进行频率换算,否则计数值被丢弃。通过该方法可以将最大误差减小到原来的一半。设计了基于FPGA的测频系统,对改进的方法进行验证,结果表明,改进后方法的误差明显下降,证实了改进方法的有效性。被测频率换算成对应磁场值,改进方法的测频的绝对精度满足设计要求。
磁力仪;频率测量;全同步;FPGA;误差
EEACC:7230doi:10.3969/j.issn.1004-1699.2016.09.001
光泵磁力仪[1]是以原子能级在磁场中产生塞曼效应[2]为基础,利用光泵作用和磁共振技术[3]研制而成的高灵敏度、高精度的磁测设备[4],具有梯度容忍度大,无零点漂移、抗干扰能力强等优点,适合应用于运动状态下的快速连续的高精度测量,广泛应用于地球物理勘探、潜水艇探测、空间磁测[5]等领域。光泵磁力仪的种类有很多,包括氦(4He)、铷(85Rb、87Rb)、铯(133Cs)、钾(39K)和汞(Hg)光泵磁力仪。对于铯光泵磁力仪,美国和加拿大等国家很早就开始研究,已经有了非常成熟的产品,而我国还处于初步的研究阶段,并没有相关的产品面世。
铯光泵磁力仪输出的磁共振频率fx和被测磁场强度H成正比关系,其比例常数称为铯的旋磁比,等于3.49828 Hz/nT。通过测量磁共振频率fx可以得到被测磁场强度H=fx/3.4858 nT[6]。
常用的测频方法有直接测量法[7](M法)、周期测量法[7](T法)和等精度测量法[8-9](M/T法)。M法是在给定的闸门时间内测量被测信号的脉冲个数,从而计算得到被测信号的频率。这种测量方法的测量精度取决于闸门时间精度和闸门时间内的计数值,当被测信号频率相对较低时将产生较大误差,所以这种方法比较适合测量频率相对较高的信号。T法是通过测量被测信号的单个周期时间得到被测信号的频率。这种测量方法的测量精度取决于被测信号和基准信号的周期和基准信号计时精度,当被测信号频率较高时,测量精度很难保证,因此这种方法比较适合测量频率相对较低的信号。M/T法具有以上两种方法的优点,它通过测量被测信号数个周期的时间然后计算得到被测信号的频率,可兼顾低频与高频信号,提高了测量精度。铯光泵磁力仪测频方法[10]多采用M法和M/T法,但是不论是M法还是M/T法都存在±1的计数误差,限制了其测量精度的进一步提高。
为克服计数误差,文献[11-12]提出了全同步测频方法以消除±1的计数误差,但实际上难以实现被测信号和标准时钟信号的完全同步,存在同步检测误差。本文基于全同步测频法的原理,提出了改进的方法,并对误差进行了详细的分析,通过比对连续两次被测信号计数值是否相等,分情况对计数值进行处理,可有效提高测频精度。设计了基于FPGA的测频系统,对改进的测频方法进行了实验验证。
1 全同步测频原理
全同步测量是在等精度测频原理下,为了消除标准时钟的±1计数误差而提出的。全同步状态下,闸门信号不仅和被测信号同步,还和标准时钟同步[11-12]。但实际上不能做到绝对同步,只要被测信号和标准时钟信号的两个上升沿足够接近,时间差小于允许范围,同步检测电路就认为两者上升沿同时到来,因此其误差与同步检测的误差有关[13]。假设开启闸门时被测信号和标准信号的同步时间差为Δt1,关闭时同步时间差为Δt2,同步检测的最大误差时间为
全同步测频的相对误差为:

式中:f0为被测信号频率实际值;fx为被测信号频率测量值;t0为实际闸门时间。
全同步测频法相对误差的最大值为2Δt/t0。
2 全同步测频方法的改进
在原有的全同步测频方法的基础上提出改进的方法:判断连续两次测量中的被测信号周期个数即被测信号的实际测量时间是否相等。若相等,取其中一次测量中的被测信号和标准时钟的周期个数计数值作为有效值,计算出被测信号频率;若不等,视为无效测量。
下面分成4种情况分析改进后方法的误差。
2.1第一次测量中,第一次上升沿同步时被测信号超前Δt1,第二次上升沿同步时被测信号超前Δt2
如图1所示,Nx1、Nx2分别为第1次和第2次测量中被测信号的周期个数计数值,Ns1、Ns2分别为第1次和第2次测量中被测信号的周期个数计数值。

图1 情况1
标准时钟信号周期1/fs是可以进行选取的,当已知同步检测最大时间差Δt的情况下,选取fs满足条件1/fs>4Δt。当Nx2=Nx1时,必定有Ns2=Ns1,下面给出证明。
假设Ns2=Ns1+n(n为整数),由于能被同步电路检测到同步上升沿,且同步检测的最大时间误差为Δt,可得:

由不等式(2)和条件1/fs>4Δt,可得:
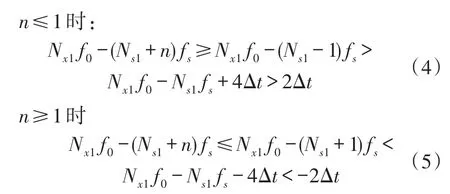
不等式(4)和不等式(5)均与不等式(3)矛盾,|n|≥1时不能满足不等式(3)条件,因此n只能取0,即Ns2=Ns2。
那么可得第2次测量中第1次上升沿同步中被测信号超前Δt2,第二次上升沿同步中被测信号超前Δt1,由于0≤Δt1≤Δt,0≤Δt2≤Δt,则两次测量的相对误差均为:

而情况1未改进前,其误差就是单次测量误差,相对误差为:

式中:f0为被测信号频率实际值;fx为被测信号频率测量值;t0为被测信号实际计数时间即实际闸门时间(t0=Nx1/f0);Δt为同步检测的最大误差时间。
2.2第一次测量中,第一次上升沿同步时被测信号滞后Δt1,第二次上升沿同步时被测信号滞后Δt2
如图2所示,分析同上,则第二次测量中第一次上升沿同步中被测信号滞后Δt2,第二次上升沿同步中被测信号滞后Δt1,两次测量的相对误差均为:

而情况2未改进前,其相对误差为:


图2 情况2
2.3第一次测量中,第一次上升沿同步时被测信号超前Δt1,第二次上升沿同步时被测信号滞后Δt2
如图3所示,同上,当Nx2=Nx2时,Ns2=Ns2。第2次测量中第1次上升沿同步中被测信号滞后Δt2,第2次上升沿同步中被测信号滞后Δt1+2Δt2,同步检测的最大时间差为Δt,可得Δt1+2Δt2≤Δt。
那么两次测量的相对误差均为:

而情况三未改进前,其相对误差为:

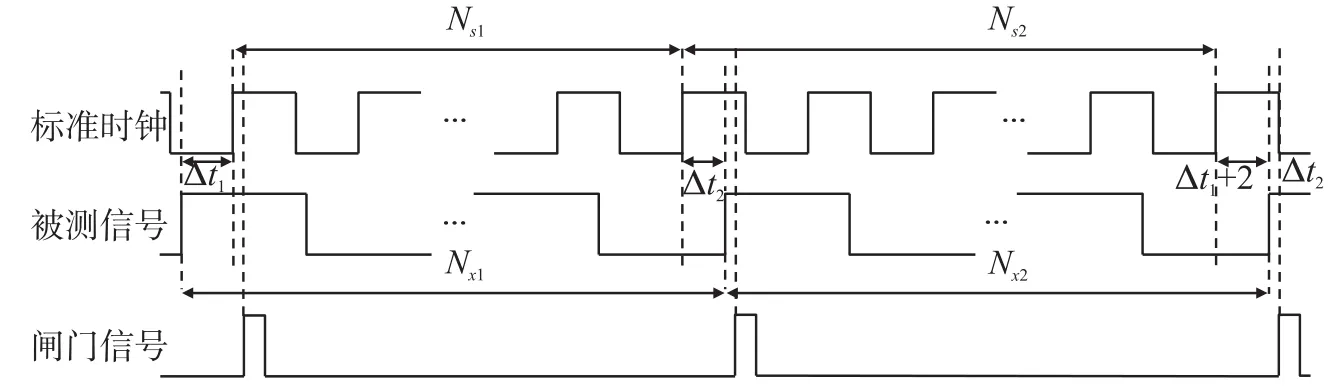
图3 情况3
2.4第一次测量中,第一次上升沿同步时被测信号滞后Δt1,第二次上升沿同步时被测信号超前Δt2
如图4所示,分析同上,第2次测量中第一次上升沿同步中被测信号超前Δt2,第2次上升沿同步中被测信号超前Δt1+2Δt2,可得Δt1+2Δt2≤Δt。
那么两次测量的相对误差均为:

而情况4未改进前,其相对误差为:


图4 情况4
由式(6)、式(8)、式(10)、式(12)可知,改进后的全同步测频方法的相对误差的最大值为Δt/t0,而改进前的相对误差的最大值为2Δt/t0。由4种情况的误差分析可知,对于情况1和情况2,改进前后的误差没有变化,误差均不大于Δt/t0;对于情况3和情况4,改进后的方法将其中测量误差大于Δt/t0的结果剔除了,从而将最大误差控制在Δt/t0以内。通过这种方法,可提高全同步测频方法的精度,并将测量的最大误差减小至原来的一半。
3 基于FPGA的测频方法的实现
基于FPGA的改进全同步测频系统的单元模块包括:放大滤波整形模块、FPGA测量模块、上位机模块,系统框图见图5,其中放大滤波整形模块将光电二级管输出的信号转换FPGA能识别的方波信号,FPGA测量模块采用改进的全同步测频方法测量输入的方波信号频率,上位机模块将通过串口接收到的频率数据进行处理,并转换成磁场强度进行显示。铯光泵磁力仪的测量磁场的范围是35 000 nT~70 000 nT,对应的磁共振频率为122.4 kHz~244.9 kHz,并且要求测量的绝对精度达到1 nT,即测频的绝对精度要达到3.498 28 Hz。
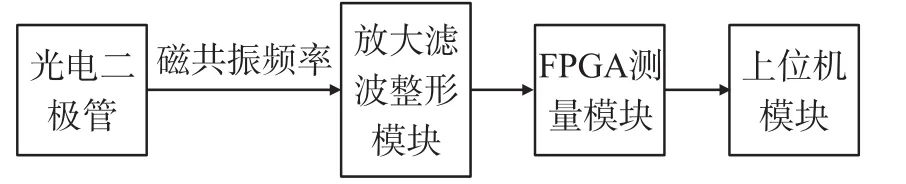
图5 改进全同步频率计系统框图
3.1放大滤波整形模块
铯光泵磁力仪中由光电二极管输出所要测量的正弦波信号。如图6所示,放大滤波整形模块包括i-v前置放大电路[14]、滤波放大电路和限幅整形电路,最后输出兼容TTL电平的方波电压信号。i-v前置放大电路选用AD公司的AD8627,具有250fA低输入偏置电流和低噪声特性,能尽可能减少输入噪声;滤波放大电路为4阶巴特沃兹带通滤波器,中心频率184 kHz,带宽124 kHz;限幅整形电路采用单路施密特触发器SN74LVC1G17。

图6 放大滤波整形电路
3.2FPGA测量模块
选用Altera公司生产的Cyclone IV E系列的EP4CE6E22C8芯片作为核心器件实现测频功能。如图7所示,整个FPGA测量模块主要由6个模块构成:同步检测模块、控制模块、计数器模块、锁存选择模块、数据运算模块和串口模块。同步检测模块对标准时钟和被测信号进行检测,产生控制信号给控制模块,控制模块控制两组四个计数器的计数器模块、锁存选择模块、包括乘法器以及除法器的数据运算模块,最后计算得到被测频率的频率值,通过串口模块传输给上位机。其中标准时钟信号频率fs选择1 MHz,由外部50 MHz晶振进行分频得到。同步检测模块同步时间差的最大值Δt为2.5 ns。
图7 FPGA测量模块系统框图
具体工作流程为,当标准时钟和被测信号同时达到上升沿时,产生1个脉冲,控制模块敏感这个脉冲的上升沿。第1个脉冲到来时,第1组2个计数器T1-1、T1-2开始分别对标准时钟和被测信号进行计数,同时锁存第2组两个计数器T2-1、T2-2的计数值;第2个脉冲到来时,第2组2个计数器T2-1、T2-2开始计数,同时锁存第1组的2个计数器T1-1、T1-2的计数值。
每次控制模块敏感到脉冲的上升沿,就将两次锁存的被测信号计数值进行比较,如果相同,将第1组的两个计数器T1-1、T1-2计数值给数据运算模块计算出被测频率值;如果不等,则不开启数据运算模块。进行比较后,不再锁存T1-1、T1-2的值,但继续锁存T2-1、T2-2的值,下一次比较后则相反,之后反复上述过程。
4 实验结果和分析
在同等情况下,对改进前后的全同步测频方法进行对比实验。测试信号由信号发生器GFG-3015产生,输入频率范围为122.4 kHz~244.9 kHz。将测量结果与理论值进行比较并计算误差。测量结果见表1和表2。
表1 改进前方法的测试结果
表2 改进后方法的测试结果
可以看出,改进后的全同步测频方法测得的频率误差均小于改进前的误差,误差有明显减小,但没有减小到原来的一半。其原因为:理论分析时讨论的都是最大误差,但由于改进方法的本质原理是剔除情况3和情况4中具有较大的误差即大于最大误差的一半的测量结果,对于情况1和情况2,改进前后的测量误差一致。因而平均误差并不能减少至原来的一半。改进后测频方法的测频绝对精度满足3.498 28 Hz的设计要求。
5 结论
本文对全同步测频法的误差进行了分析并对该方法进行了改进。通过判断连续两次测量中的被测信号周期个数计数值是否一致,来对数据进行取舍:当两次测量值一致时认为这两次均为有效测量,取其中一次测量中的标准时钟和被测信号周期个数计数值,计算出被测信号频率,否则认为是无效测量。此改进方法可有效剔除原本误差大于
Δt/t0的测量结果,最大误差为原来的一半,从而保证更高的测量精度。设计了基于FPGA的改进的全同步测频系统,与改进前的测频方法进行了对比实验。结果表明,改进后的全同步测频方法误差明显小于改进前,证实了改进的测频方法的有效性,且测频的绝对精度满足3.498 28 Hz的设计要求。
[1]张振宇.氦光泵磁测技术研究[D].吉林大学,2012.
[2]李庆萌,张军海,曾宪金,等.地磁场对铯原子磁力仪共振谱线的影响[J].哈尔滨工程大学学报,2013,12:1617-1620.
[3]周志坚,程德福,王君,等.氦光泵磁力仪中磁敏传感器的研制[J].传感技术学报,2009,22(9):1284-1288.
[4]Alexandrov EB.Recent Progress in Optically Pumped Magnetome⁃ters[J].PhysicaScripta,2003,105:27-30.
[5]连明昌,程德福,周志坚,等.光泵磁敏传感器中FPGA调频器设计与实现[J].传感技术学报,2012,25(11):1618-1622.
[6]杨江俊.铯光泵弱磁检测电路的设计与实现[D].武汉:武汉理工大学,2014.
[7]魏钟记,刘峰,汪铭东.数字测频方法及实现[J].电子测量技术,2006(4):28-29.
[8]方易圆,邓琛.等精度频率计的FPGA设计[J].测控技术,2012,10:1-4.
[9]汪首坤,林波涛,王军政.自适应等精度频率测量方法与实现[J].传感技术学报,2007,20(2):346-349.
[10]张谨,宗发保,邹鹏毅,等.基于FPGA的铯光泵磁力仪频率计设计[J].海洋测绘,2015(2):80-82.
[11]徐成,刘彦,李仁发.一种全同步数宇频率测量方法的研究[J].电子技术应用,2004,38(12):43-46.
[12]魏西峰.全同步数宇频率测量方法的研究[J].现代电子技术,2005,28(12):101-105.
[13]陈芳红,张志文.一种全同步测频系统设计[J].科学技术与工程,2013,27:7971-7978.
[14]张法业,姜明顺,隋青美,等.强度解调的光纤光栅振动检测硬件电路设计与实验研究[J].传感器学报,2015,28(12):1760-1765.

卞骁炜(1991-),男,天津大学硕士研究生,主要研究方向为磁传感器测量技术,errolbxw@163.com;

李醒飞(1966-),男,天津大学精密仪器与光电子工程学院副院长,天津大学空间仪器与技术研究所所长,教授,博士生导师,主要研究方向为智能精密测量技术、传感与信息处理技术、海洋观察与探测技术。现兼任中国仪器仪表学会空间仪器分会副理事长,中国仪器仪表学会精密机械分会常务理事,天津市智能精密测量技术工程中心主任,lxftju@163.com。
Research and Implementation of Frequency Measurement Method for Cesium Optically Pumped Magnetometer*
BIAN Xiaowei1,LI Xingfei1*,LI Li1,YANG Ying2
(1.State Key Laboratory of Precision Measuring Technology and Instruments,Tianjin University,Tianjin 300072,China;2.School of Electrical Engineering and Automation,Tianjin University of Technology and Education,Tianjin 300222,China)
It is necessary for cesium optically pumped magnetometer to measure magnetic resonance frequency and change it to magnetic field intensity.An improved method was proposed to reduce errors based on complete synchro⁃nization frequency measurement method.When the numbers of measured signal cycles in two consecutive measure⁃ments are the same,the count value will be used to calculate the frequency of the measured signal,or it will be dis⁃carded.The biggest error of the improved method is as half as the original method.A FPGA-basedfrequency mea⁃surement system was designed and implemented.The results of the experiment show that the improved method can effectively reduce errors and the absolute accuracy changed tomagnetic field intensity meets the design requirement.
magnetometer;complete synchronization;frequency measurement;FPGA;error
TM935;P716+.82
A
1004-1699(2016)09-1305-06
项目来源:国家自然科学基金项目(61503283);天津市应用基础与前沿技术研究计划项目(青年项目)(15JCQNJC02400)
2016-01-20修改日期:2016-05-09