电动汽车用永磁同步电机转矩脉动抑制方法综述
2016-10-21王硕康劲松钟再敏张舟云
王硕,康劲松,钟再敏,张舟云
(1.同济大学电子与信息工程学院,上海201804;2.同济大学汽车学院,上海201804 3.上海电驱动股份有限公司,上海200240)
电动汽车用永磁同步电机转矩脉动抑制方法综述
王硕1,康劲松1,钟再敏2,张舟云3
(1.同济大学电子与信息工程学院,上海201804;2.同济大学汽车学院,上海201804 3.上海电驱动股份有限公司,上海200240)
在各类驱动电机中,永磁同步电机以其能量密度高,效率高、响应快等优势,广泛应用于电动汽车电驱动系统中。电机本体存在气隙磁场分布的非正弦特性、齿槽效应,逆变器存在死区时间和管压降等会引发电机的转矩脉动问题,导致电驱动系统产生大量电磁噪声。国内外学者提出了多种优化和改进措施,结合近年来国内外的研究成果,针对电机本体齿槽转矩脉动采用的斜槽法和分数槽法、针对电流谐波转矩脉动的迭代学习控制、重复控制法、附加转矩闭环控制和谐波电流注入法等,分析了各类方法的优缺点,为改善电动汽车的舒适性和电驱动系统的可靠性提供了理论参考。
电动汽车;永磁同步电机;转矩脉动;矢量控制
引言
永磁同步电机PMSM(permanent magnet synchronousmotor)以其高功率密度、高输出转矩、高效率等特点,在电动汽车驱动系统领域得以广泛应用,然而,电驱动系统中永磁同步电机转矩脉动是产生电磁噪声和扭转振动问题的重要原因,一方面,电驱动系统的电磁噪声有别于传统汽车汽油机噪声,其频率较高,易使人产生不舒适感;另一方面,严重的电机转矩脉动会引起电机的磁滞及涡流损耗增加,使电机材料承受的电应力增大,缩短了电机的使用寿命[1-2]。转矩输出的平滑度成为衡量电机控制动态性能和稳态性能的重要指标之一,如何克服永磁同步电机的转矩脉动一直是国内外研究者的研究重点,其主要影响因素大体分为3个方面:(1)电机本体方面,如磁路不对称、定转子不同轴等电机加工工艺原因和磁路饱和现象等,使得永磁体产生的磁场与电枢齿槽相互作用,引起齿槽转矩脉动;(2)电流谐波方面,由于逆变器的死区时间和开关管导通管压降等非理想因素影响的存在,使得调速系统引入大量的高次电流谐波分量[3];(3)检测误差方面,由于电流传感器的测量存在的直流偏置或者旋转变压器的测量存在正交、偏置等误差,会影响电机电流转矩计算的精确性,使得电机产生检测转矩脉动[3]。
抑制永磁同步电机转矩脉动是提高电驱动系统性能的关键技术之一,国内外研究机构进行了大量的研究,针对传感器的检测误差,主要从提高测量精度和间接控制补偿测量误差[3-6],例如角度波动FIR滤波算法[3]和旋转变压器改进最小二乘法输出角度校正算法[4],文献[5]和文献[6]剖析了角度波动引起电流波动的机理,通过电流波动间接补偿了角度测量误差,该类方法可以在不增加传感器成本基础上提高传感器测量精度,进而减小测量转矩脉动,本文不做重点阐述。本文主要从电机本体齿槽转矩脉动和电流谐波转矩脉动两方面进行探讨和展望,从转矩的精确控制效果上看,齿槽转矩脉动和电流谐波转矩脉动共同影响着转矩输出的平滑性,加工工艺改进和控制算法改进具有可叠加性。在电机本体优化方面,主要为斜槽法[7-10]和分数槽法[11-12],在电流谐波抑制方面,主要为迭代学习控制[13-15]、重复控制[16-18]、附加转矩闭环的方法[19-24]以及谐波电流注入法[25-30]等。
1 永磁同步电机转矩脉动分析
1.1永磁同步电机齿槽转矩脉动
永磁同步电机的齿槽转矩脉动是指在电枢绕组不通电的情况下,由永磁体产生的磁场强度与电枢的齿槽之间相互作用形成的转矩脉动[6]。齿槽转矩的幅值及脉动的周期与永磁同步电机的分槽数和极对数相关。齿槽转矩脉动从本质上讲,是存在于齿槽和永磁体之间的切向分力作用,齿槽转矩的幅值与定子的电流无关,而与转子的相对位置有关。齿槽转矩脉动会使得永磁同步电机产生电磁噪声以及机械振动,特别是在电机低速电流低频运行时,表现更为严重,当脉动频率与电流谐振频率一致时可能产生共振,严重影响电驱动系统的安全性和可靠性[3]。
齿槽转矩可以表示为永磁同步电机内的磁能总量与相对位置的导数。假设铁心具有无穷大的磁导率,电机内的磁场能量可近似表示为永磁体磁场能量与气隙内磁场能量之和[7-10]。假设忽略铁心饱和、漏磁、端部效应等因素的影响。齿槽转矩的解析表达式为

式中:μ0为真空磁导率;La为铁芯长度;R1为定子内径;R2为转子外径;Gnγ为有效气隙磁导圆周分布函数;Bnγ为气隙磁密圆周分布函数;z为分槽数;p为极对数;γ为z与p的最小公倍数;α为电枢中心线与永磁体中心线之间的夹角[7-10]。永磁同步电机每次旋转一周,齿槽转矩周期数为电机的极数2p和电机槽数z的最小公倍数γ,这是因为电机磁场的分布规律是每隔z/γ个槽距变化一个周期。
1.2永磁同步电机电流谐波转矩脉动
永磁同步电机定子电流通常是由电压型逆变器通过PWM控制产生的,逆变器的结构通常为三相全桥逆变电路。为了防止逆变器的上下桥臂直通,往往加入死区时间。逆变器的死区时间和IGBT等开关器件的管压降都会使得电流发生畸变,引发转矩脉动。
受到逆变器死区时间和管压降的影响,逆变器输出电压无法形成完美的正弦电压。将考虑死区和不考虑死区的输出电压之间的误差进行傅里叶分解[3],可以得到

式中:Δu为非理想状态下开关管的电压误差幅值,推导过程可以参考文献[28],永磁同步电机的定子绕组,假设三相绕组对称,且星形连接,则在实际系统中的三的整数倍的谐波分量不能导通,则式(3)中电压误差将使得电流谐波只有5次、7次、11次、13次等谐波分量[3],相对于电流基频,主要电流谐波的阶次为5次和7次。矢量控制的基本思想是将三相定子电流经过PARK变换得到dq轴电流而等效成直流电机进行控制的,由于PARK变换是一个无损变换,因此定子的三相电流的谐波分量也将以高次谐波的形式反映在dq旋转坐标系下,特别是5次、7次电流谐波转换到dq坐标系下的电流6次谐波分量,导致转矩存在6次脉动[28]。
2 永磁同步电机齿槽转矩脉动抑制方法
根据式(1),常用的齿槽转矩的削弱方法主要分为两类,一类是通过设计电机改变永磁体的气隙磁密,通过改变傅里叶分解次数Bnγ,削弱对齿槽转矩的影响;另一类为改变相对气隙磁导,削弱傅里叶分解次数Gnγ[7-10]。由于大多数的齿槽转矩脉动的抑制方法多集中于理论研究,较难实际实现,而在工程实际中最常用的方法是斜槽法和分数槽法。
2.1斜槽法
如文献[9]所述,针对定子结构采用斜槽是最为有效、应用最广泛的齿槽转矩脉动抑制方法之一。定子齿槽相对于转子磁极倾斜一个定子齿距,使得气隙磁密为一个常数,消除齿槽转矩脉动[9],定子斜槽如图1所示。
实际应用中,即便是使用定子斜槽结构,由于端部效应的存在,斜槽并不能完全消除铁心存在于端部之间磁场产生的齿槽转矩,气隙磁密是一个常数很难保证,从而不可能将齿槽转矩脉动完全消除[9]。此外,实际生产过程中,即便是同一台电机,其永磁体也存在一定的分散性,制造中导致的转子偏心等现象,影响斜槽削弱齿槽转矩脉动的效果,对于一台开口槽成型的绕组电机,势必会使电机本身线圈形状更加复杂,嵌线、斜槽工艺实现较困难,斜槽系数的存在降低了电机的利用率[9-11]。
2.2分数槽法
文献[12]采用了分数槽绕组法设计永磁同步电机来降低齿槽转矩脉动,根据式(1)所述,齿槽转矩仅与B的nγ次谐波分量有关,当n等于1时,称之为基次齿槽转矩,转子旋转一周对应齿槽转矩脉动周期数为γ,n次齿槽转矩脉动是由nγ次谐波产生,齿槽转矩脉动周期数为nγ。相对于整数槽绕组的永磁同步电机,采取分数槽绕组的电机可以选择更多的槽数组合,选择最小公倍数较大的槽数z和极数2p的最优组合可以实现降低电机本体带来的齿槽转矩脉动,但采用分数槽组合后,各极数下的绕组分布将出现不对称,而使电机的有效转矩分量部分下降,电机的转矩输出平均值也会因此而相应减小。

图1 定子斜槽Fig.1 Skew-slot
3 谐波电流引起的转矩脉动抑制方法
电流谐波而产生的转矩脉动一直受到研究者们关注,由于抑制电流谐波的控制算法往往通过改进传统矢量控制的速度环或者电流环来进行,在不需要添加任何硬件基础上进行算法设计,具有更大的实际意义。本文将以迭代学习法、重复控制法、转矩闭环反馈法以及电流谐波注入法为例进行综述和分析。
3.1迭代学习控制方法
迭代学习控制方法可以将周期的偏差信号以一种记忆的方式进行“自学习”,是一种无模型控制方法,让偏差在有限时间内趋近于0,迭代学习控制算法具有以下2个特点:①算法较为简单,可以在原控制器基础上叠加实现;②能够通过不断记忆与学习将系统的稳态误差减小。
文献[13-15]采用了迭代学习控制策略实现谐波转矩的抑制,系统通过先前的信息不断修正给定的q轴电流分量达到谐波抑制的目的。迭代学习算法的永磁同步电机控制系统如图2所示。迭代学习算法基本框图如图3所示。

图2 基于迭代学习算法的永磁同步电机控制系统Fig.2 Permanent magnet synchronous motor control system based on iterative learning algorithm

图3 迭代学习算法框图Fig.3 Bolck diagram of iterative learning algorithm
迭代学习算法的内部采用带遗忘因子的PI型迭代学习控制算法,控制输入主要是转矩的偏差量,经过低通滤波器,利用过去的转矩偏差记忆和当前转矩偏差迭代完成得到电流参考值修正量,具体的学习律为

式中:θ为电机的电角度,即电机的位置信号;i=0,1,2,…为代表第i个电周期或者第i次迭代;α为遗忘因子,取值区间为(0,1);(θ)为上一个时刻的q轴电流补偿量;(θ)为当前时刻的q轴电流补偿量,则有

电机的转矩脉动具有一定的周期性,是具备可重复性控制任务的条件。针对转速稳态条件下,转矩脉动具有6倍次电角度的周期性,也可以将迭代学习算法从时间性迭代设计成从位置进行迭代,这称之为空间迭代学习算法。每个初始值仅与电机的空间角位置有关,而不与转速或者电流相关[13-15]。
迭代学习控制实质上是一种利用转矩周期性偏差进行记忆来修正交轴电流给定值,达到克服交轴电流规律性脉动的目的,但由于实际系统中,一方面,在转速时时刻刻发生变化,迭代学习控制算法难以保证在转速不定的条件下提供恰当的误差补偿信号;另一方面,此时需要转矩作为测量补偿信号,转矩的测量精度对于保证算法的实施尤为重要,这加大了对控制器或者成本的要求。
3.2重复控制
重复控制法是一种基于内模原理的控制方法。内模原理是在闭环调节系统中的反馈回路中设置一个内部模型,称之内模,系统外部信号特性可以通过内模描述出来,通过内模使系统获得良好的跟随性,同时具备较强的抗扰能力。内模原理的本质是将外部信号通过构造的动态模型(即为内模)植入控制系统内,构成高精度反馈,实现系统无静差地跟随给定信号。如果永磁同步电机系统转矩周期不变,可以设计重复控制器将上一周期的控制误差作用于当前生成的控制量,增强其对周期性扰动的抵抗能力,基于重复控制的永磁同步电机控制系统如图4所示。
由图4可知,控制器输出u(k)是由PI控制器输出量uPI(k)与重复控制输出量uRP(k)叠加而成,是一种重复控制和PI控制相结合的控制方案实现转矩参考值的动态补偿方法。
基本重复控制框图如图5(a),其传递函数为
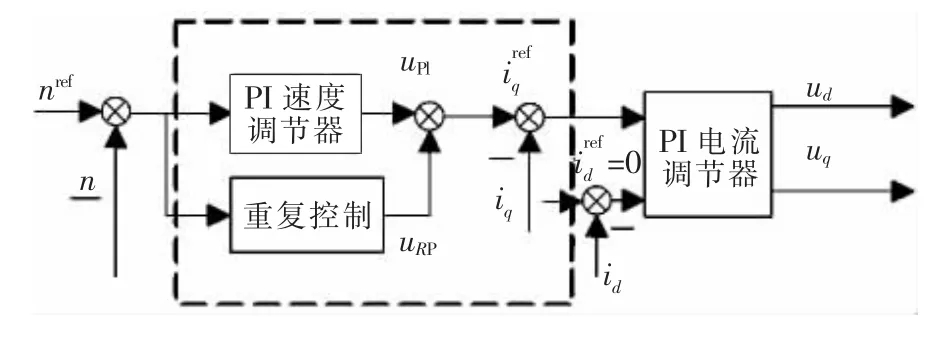
图4 基于重复控制的永磁同步电机控制系统Fig.4 Permanent magnet synchronous motor control system based on repetitive control

基本重复控制器由于存在虚轴上的极点,其系统稳定较差,因此往往引入低通滤波器、延时环节和补偿器,如图5(b)。由于低通滤波器的引入,虚轴极点发生偏移,用来改善系统稳定性,S(z)为串联补偿器用于超前滞后补偿[18]。然而,重复控制将大量的占用处理器的存储空间,而转速变化条件下,重复控制需要重新设计参数[11],其传递函数为

为了解决大量存储空间占用问题,文献[17]采用信号重构型重复控制将需要重复的信号离散化,延时环节需要N个延时单元,通过傅里叶分解,可将单一频率以N个延时单元为周期更新,减小了存储空间的压力,如果需要多个周期重复控制时,可以采用级联和叠加方式实现,如图5(c)所示。

图5 3种重复控制算法结构框图Fig.5 Blook diagram of three repetitive control algorithms
3.3转矩闭环反馈控制方法
永磁同步电机通常采用矢量控制,转矩的控制是通过对电流的间接控制实现的,转矩闭环反馈控制是直接引入转矩做闭环的控制方法,如图6所示,该类方法在直接转矩控制中应用较多[22-24],由于转矩的闭环存在,该类方法可以一定程度地抑制转矩脉动。然而,转矩的检测往往通过状态观测器来实现,常用的状态观测器有龙贝格观测器[20]、Kalman滤波器[19-20]、滑模观测器[21]等。

图6 附加转矩闭环控制算法框图Fig.6 Block diagram of additional torque closed loop control algorithm
文献[20]提出采用龙贝格观测器做负载转矩观测时,由于机械传感器存在测量误差,使得观测器对于测量噪声抑制能力较差。为此,文献[19]分析了负载转矩观测器的基本原理及实现方法,提出一种基于Kalman滤波器的负载转矩观测器设计方法,通过设计负载转矩观测器增加转矩闭环,尤其是负载发生突变过程中的,Kalman观测器可以实现对负载转矩的变化良好的跟随性,利用负载转矩的观测值形成闭环,实现对参考转矩的动态补偿。Kalman滤波器的迭代算法如下:①分别计算状态变量和协方差矩阵的先验估计值;②Kalman增益的计算;③根据测量结果更新状态估计值,计算状态变量的最优估计值;④协方差矩阵的更新。
文献[21]提出负载转矩滑模观测器设计方法,其算法框图如图7所示,设计方法将给定转速和反馈转速的误差做滑模面,实现对负载转矩的观测,为了应对滑模控制的系统抖振,引入前馈补偿,提高了系统的抗扰性,削弱了系统的抖振。
转矩反馈控制方法通过电机的模型来产生负载转矩偏差作为反馈信号或者动态转矩参考值补偿信号,使得系统增加了转矩附加闭环,由于状态观测器的引入,需要在系统稳定性和响应速度之间做出平衡。Kalman滤波器较为依赖电机本体参数,故而该方法鲁棒性较差,Kalman滤波器算法对磁链和转矩的估算也相对较为复杂,滑模观测器则需要额外的抖振抑制方法。

图7 负载转矩滑模观测器算法框图Fig.7 Block diagram of load torque sliding mode observer
3.4电流谐波注入抑制方法
谐波注入法的基本思想来源于广义dq坐标变换,三相电流基波通过坐标变换在dq坐标系下表现为直流分量。在dq坐标系下的电流PI调节器理论上可以做到无静差跟踪参考电流值,电流环具有稳态精度较高,动态响应速率较好等优点,在工程上简单实用。将这类坐标变换基本思想扩展到n次同步旋转坐标变换,可以将n次谐波变为直流量,通过低通滤波器滤除高次谐波,提取直流分量进行谐波抑制,随着转速不同,该广义坐标变换将随着基频的变化而变化,如图8所示,针对电流由于死区时间和管压降产生的5、7次电流谐波,5次电流谐波在广义5次dq坐标系下以-5ω的速率旋转,7次电流谐波在广义7次dq坐标系下以7ω的速率旋转。通过5次7次旋转坐标变换,在广义多同步旋转坐标系下包含了要检测谐波分量的幅值和相位信息。通过低通滤波器可以对谐波含量变换后的直流量进行提取,并通过设计谐波坐标系下的多重PI控制器可以抑制电流的谐波,进而抑制电机的转矩脉动。

图8 基于谐波注入法永磁同步电机控制系统Fig.8 Permanent magnet synchronous motor control system based on harmonics injection
文献[25]针对逆变器的死区时间和管压降产生的谐波,将电流谐波转换到5次、7次旋转坐标系下,采用注入谐波电流法可避免传统的死区补偿算法需准确检测电流过零点的技术难点,达到了抑制转矩脉动的效果;所采用的算法同时也能够抑制因永磁同步电机气隙磁场畸变产生的电机谐波电流。但是由于引入谐波电流环存在多重PI控制器需要调节,算法负担加倍,参数调节难度加倍。文献[26-30]将多同步旋转坐标系和多谐振控制器[30]以及重复控制建立了数学关系,如图9所示,可以简化算法的重复性,提高了算法工业应用价值。

图9 5、7次同步旋转坐标系下交叉耦合PI控制器设计Fig.9 Cross-coupling PI controller design on Fifth and seventh synchronous rotating coordinates
针对车载工况,对64 kW永磁同步电机采用谐波注入法进行了Simulink仿真分析,设定转矩为50 N·m,转速为2 000 r/min,电流的5次、7次谐波在dq坐标系下转变为6次转矩波动,引入谐波环的电流控制算法,抑制5次、7次电流波动,提高输出电流的正弦度,反映到转矩上即可以降低转矩的6次转矩脉动。如图10所示,系统在0.3 s时加入谐波抑制算法,得到明显的抑制,对加入算法的转矩脉动进行FFT分析,如图11所示,加入算法之前6次转矩为4.20 N·m,加入算法之后6次转矩为1.20 N·m,降低的比例达到71.43%,6次脉动有了明显的削弱。

图10 加入谐波抑制算法的转矩脉动Fig.10 Simulation result on torque ripple with the addition of harmonic suppression algorithm

图11 加入算法前后转矩脉动FFT分析Fig.11 FFT analysis of torque ripple before and after adding the algorithm
4 结语
聚焦永磁同步电机转矩脉动问题,分析了电动汽车用永磁同步电机矢量控制算法中转矩脉动的产生原因,着重综述了齿槽转矩脉动抑制方法和电流谐波转矩脉动抑制方法的研究现状,国内外学者针对转矩脉动的抑制算法已具有一些突破,从目前来看,尚存在一些问题亟待解决。
从电机本体上抑制转矩脉动的方法,针对齿槽转矩脉动,大多会使得电机结构复杂,加工难度提高,部分算法会导致电机的平均转矩下降。针对电流谐波转矩脉动抑制算法、迭代学习算法和重复控制更适合于周期性的稳态转矩脉动,而对于动态调节过程中的转矩脉动,无法明显抑制,转矩闭环控制算法需要设计转矩观测器,一些算法依赖电机参数,在计及磁饱和交叉饱和的永磁同步电机控制系统中,算法应用将更复杂;谐波注入的方法,由于引入谐波电流环存在多重PI控制器需要调节,算法负担加倍,简化算法的重复性将变得十分迫切。
通过改变传统的矢量控制双闭环的控制结构来抑制转矩脉动,部分研究者已经取得了重要突破,尽管这些方法仍然有一些不足,仍亟待深入研究。随着数字信号处理器运算速度的提高,以及相应控制理论的完善,未来研究热点和焦点将集中在动态转矩响应下的脉动问题,尤其是多种方案的结合,并应用于工业实际。现有的方法为研究者提供了一种新的思路,为高性能的永磁同步电机控制技术的发展提供了重要的参考。
[1]Dai Ying,Song Liwei,Cui Shumei.Development of PMSM drives for hybrid electric car applications[J].IEEE Transactions on Magnetics,2007,43(1):434-437.
[2]薛梦觉,康劲松,魏俊天,等.电动汽车IPMSM驱动控制技术[J].电源学报,2014,12(1):28-34. Xue Mengjue,Kang Jinsong,Wei Juntian,et al.Control strategy for IPMSM of electric vehicle driving system[J].Journal of Power Supply,2014,12(1):28-34(in Chinese).
[3]魏俊天,康劲松,崔宇航.永磁同步电机转矩波动分析及其抑制[J].机电一体化,2014(12):15-19. Wei Juntian,Kang Jinsong,Cui Yuhang.Analysis and inhibition of permanent magnet synchronous motor torque ripple[J].Mechatronics,2014(12):15-19(in Chinese).
[4]Hoseinnezhad R,Bab-Hadiashar A,Harding P.Calibration of resolver sensors in electromechanical braking systems:A modified recursive weighted least-squares approach[J]. IEEE transactions on industrial electronics,2007,54(2):1052-1060.
[5]Kwon Y H,Hwang S H,Kim J M,et al.Compensation of amplitude imbalance of resolver signal for PMSM drives[C]//Power Electronics and Motion Control Conference,2009.IPEMC'09.IEEE 6th International.IEEE,2009:1827-1831.
[6]Hwang S H,Kim H J,Kim J M,et al.Compensation of amplitude imbalance and imperfect quadrature in resolver signals for PMSM drives[J].IEEE Transactions on Industry Applications,2011,47(1):134-143.
[7]Islam R,Husain I,Fardoun A,et al.Permanent-magnet synchronous motor magnet designs with skewing for torque ripple and cogging torque reduction[J].IEEE Transactions on Industry Applications,2009,45(1):152-160.
[8]杨玉波,王秀和,朱常青.电枢槽口宽度对内置式永磁同步电机齿槽转矩的影响[J].电机与控制学报,2011,15(7):21-25. Yang Yubo,Wang Xiuhe,Zhu Changqing.Effect of slot opening on the cogging torque of permanent magnet synchronous motor[J].Electric Machines and Control,2011,15(7):21-25(in Chinese).
[9]汪旭东,许孝卓,封海潮,等.永磁电机齿槽转矩综合抑制方法研究现状及展望[J].微电机,2009,42(12):64-70. Wang Xudong,Xu Xiaozhuo,Feng Haichao,et al.Present Study and prospect of the cogging torque comprehensive reducing methods of PM motors[J].Micromotors,2009,42(12):64-70(in Chinese).
[10]沈勇环,陈益广,赵维友.削弱反磁通电机齿槽转矩的两种新方法[J].电工技术学报,2007,22(7):141-144. Shen Yonghuan,Chen Yiguang,Zhao Weiyou.Two New Methods to Reduce Cogging Torque in Flux Reversal Machine[J].Transactions of China Electrotechnical Society,2007,22(7):141-144(in Chinese).
[11]Stumberger B,Stumberger G,Dolinar D,et al.Evaluation of saturation and cross-magnetization effects in interior permanent-magnet synchronous motor[J].IEEE Transactions on Industry Applications,2003,39(5):1264-1271.
[12]郭淑英,李坤,彭俊.采用分数槽绕组降低永磁同步电机齿槽转矩的研究[J].大功率变流技术,2013(1):56-60. Guo Shuying,Li Kun,Peng Jun.Study on reducing cogging torque of permanent magnet synchronous motor with fractional-slot windings[J].High Power Converter Technology,2013(1):56-60(in Chinese).
[13]Qian Weizhe,Panda S K,Xu J X.Speed ripple minimization in PM synchronous motor using iterative learning control[J].IEEE Transactions on Energy Conversion,2005,20(1):53-61.
[14]李文善.基于PI型迭代学习控制的永磁同步电机转矩脉动抑制策略[D].天津:天津大学,2012. Li Wenshan.Torque Ripple Minimization of PMSM Using PI Type Iterative Learning Control[D].Tianjin:Tianjin U-niversity,2012(in Chinese).
[15]Yan Yan,Li Wenshan,Deng Weitao,et al.Torque ripple minimization of PMSM using PI type iterative learning control[C].Industrial Electronics Society,IECON 2014-40th Annual Conference of the IEEE.IEEE,2014:925-931.
[16]储剑波,胡育文,黄文新,等.一种抑制永磁同步电机转速脉动的方法[J].电工技术学报,2009,24(12):43-49. Chu Jianbo,Hu Yuwen,Huang Wenxin,et al.Suppressing speed ripples of permanent magnetic synchronous motor based on a method[J].Transactions of China Electrotechnical Society,2009,24(12):43-49(in Chinese).
[17]李毅拓,陆海峰,瞿文龙,等.用于逆变器电流谐波抑制的改进的重复控制[J].清华大学学报(自然科学版),2013,53(7):1030-1035. LI Yituo,LU Haifeng,QU Wenlong,et al.Improved repetitive control for inverter current harmonics suppression[J]. Journal of Tsinghua University(Science and Technology),2013,53(7):1030-1035(in Chinese).
[18]邹继斌,李建军,徐永向,等.基于重复控制深海柱塞泵用永磁同步电机转速波动的抑制[J].电工技术学报,2011,26(6):46-50. Zou Jibin,Li Jianjun,Xu Yongxiang,et al.Repetitive controller for suppression of the speed fluctuation in PMSM used for deep-sea plunger pump[J].Transactions of China Electrotechnical Society,2011,26(6):46-50(in Chinese).
[19]张猛,肖曦,李永东.基于扩展卡尔曼滤波器的永磁同步电机转速和磁链观测器[J].中国电机工程学报,2008,27(36):36-40. Zhang Meng,Xiao Xi,Li Yongdong.Speed and flux linkage observer for permanent magnet synchronous motor based on EKF[J].Proceedings of the CSEE,2008,27(36):36-40(in Chinese).
[20]郑泽东,李永东,肖曦,等.永磁同步电机负载转矩观测器[J].电工技术学报,2010,25(2):30-36. Zheng Zedong,Li Yongdong,Xiao Xi,et al.Load torque observer of permanent magnet synchronous motor[J]. Transactions of China Electrotechnical Society,2010,25(2):30-36(in Chinese).
[21]张晓光,孙力,赵克,等.基于负载转矩滑模观测的永磁同步电机滑模控制[J].中国电机工程学报,2012,32(03):111-116. Zhang Xiaoguang,Sun Li,Zhao Ke,et al.Sliding mode control of PMSM based on a novel load torque sliding mode observer[J].Proceedings of the CSEE,2012,32(03):111-116(in Chinese).
[22]王斌,王跃,郭伟,等.基于定子磁链降阶状态观测的永磁同步电机无差拍直接转矩控制系统[J].电工技术学报,2014,29(3):160-171. Wang Bin,Wang Yue,Guo Wei,et al.Deadbeat direct torque control of permanent magnet synchronous motor based on reduced order stator flux observer[J].Transactions of China Electrotechnical Society,2014,29(3):160-171(in Chinese).
[23]朱昊,肖曦,李永东.永磁同步电机转矩预测控制的磁链控制算法[J].中国电机工程学报,2010(21):86-90. Zhu Hao,Xiao Xi,Li Yong-dong.Stator flux control scheme for permanent magnet synchronous motor torque predictive control[J].Proceedings of the CSEE,2010(21):86-90(in Chinese).
[24]Jezernik K,Horvat R,CˇurkovicˇM.A switching control strategy for the reduction of torque ripple for PMSM[J]. IEEE Transactions on Industrial Informatics,2013,9(3):1272-1279.
[25]廖勇,甄帅,刘刃,等.用谐波注入抑制永磁同步电机转矩脉动[J].中国电机工程学报,2011,31(21):119-127. Liao Yong,Zhen Shuai,Liu Ren,et al.Torque ripple suppression of permanent magnet synchronous motor by the harmonic injection[J].Proceedings of the CSEE,2011, 31(21):119-127(in Chinese).
[26]Zou Changyue,Liu Bangyin,Duan Shanxu,et al.Stationary frame equivalent model of proportional-integral controller in dq synchronous frame[J].IEEE Transactions on Power Electronics,2014,29(9):4461-4465.
[27]Zhou Keliang,Lu Wenzhou,Yang Yongheng,et al.Harmonic control:a natural way to bridge resonant control and repetitive control[C].American Control Conference(ACC),2013.IEEE,2013:3189-3193.
[28]Kim S Y,Park S Y.Compensation of dead-time effects based on adaptive harmonic filtering in the vector-controlled AC motor drives[J].IEEE Transactions on Industrial Electronics,2007,54(3):1768-1777.
[29]李毅拓,陆海峰,瞿文龙,等.基于前馈补偿的永磁同步电机电流谐波抑制方法[J].清华大学学报(自然科学版),2012,52(3):362-366. Li Yituo,Lu Haifeng,Qu Wenlong.PMSM current harmonics suppression based on feedforward compensation[J].Journal of Tsinghua University(Science and Technology),2012,52(3):362-366(in Chinese).
[30]王贺超,夏长亮,阎彦,等.基于谐振控制的表贴式永磁同步电机弱磁区电流谐波抑制[J].电工技术学报,2014,29(9)83-91. Wang Hechao,Xia Changliang1,Yan Yan,Shi Tingna. Current harmonic suppression in the flux-weakening control of surface permanent magnet synchronous motors using resonant controllers[J].Transactions of China Electrotechnical Society.2014,29(9)83-91(in Chinese).
Overviews of Torque Ripple Suppression Method with Permanent Magnet Synchronous Motor Used in Electric Vehicles
WANG Shuo1,KANG Jinsong1,ZHONG Zaimin2,ZHANG Zhouyun3
(1.College of Electronics and Information Engineering,Tongji University,Shanghai 201804,China;2.School of Automotive Studies,Tongji University,Shanghai 201804,China;3.Shanghai Edrive Co.Ltd.,Shanghai 200240,China)
Among all kinds of motor drive systems,permanent magnet synchronous motor(PMSM)with its high energy density,high efficiency,fast response and other advantages is widely used in electric drive systems in the applications of electric vehicles.However,the distribution of non-sinusoidal magnetic field,the cogging effect and inverter causes torque ripple to produce the large amount of electromagnetic noise in the electric drive system.A variety of optimization and improvement measures are put forward by scholars,in this article the research results at home and abroad in recent years are summarized,including the cogging torque ripple with skewing-slot method and fractional slot method,current harmonic torque ripple with iterative learning control,repetitive control method,closed-loop torque control method and harmonic current injection method.The advantages and disadvantages of various methods are analyzed and summarized,which provides a theoretical guide for improving the comfort of electric vehicle and the reliability of electric drive system.
electric vehicles;permanent magnet synchronous motor;torque ripple;vector control

王硕
10.13234/j.issn.2095-2805.2016.5.24
TM 921
A
王硕(1988-),男,通信作者,博士研究生,研究方向:高性能电机控制系统,E-mail:1988wangshuo@tongji.edu.cn。
康劲松(1972-),男,博士,教授,博士生导师,研究方向:电动汽车电驱动系统的研究工作,E-mail:kjs@tongji.edu.cn。
钟再敏(1973-),男,博士,教授,博士生导师,研究方向:汽车传动控制技术,E-mail:zm_zhong@tongji.edu.cn。
张舟云(1977-),男,博士,高级工程师,研究方向:车用永磁同步电机及其控制系统,E-mail:zzy@chinaedrive.com。
2015-11-29
中央高校基本科研业务费专项资金资助项目(1700219142)
Project Supported by Fundamental Research Funds for the Central Universities(1700219142)
