采用六相八桥臂变流器永磁同步电机系统的驱动及容错控制仿真研究
2016-10-21佟诚德许兵程路明王鹏飞郑萍
佟诚德,许兵,程路明,王鹏飞,郑萍
(哈尔滨工业大学电气工程及自动化学院,哈尔滨150080)
采用六相八桥臂变流器永磁同步电机系统的驱动及容错控制仿真研究
佟诚德,许兵,程路明,王鹏飞,郑萍
(哈尔滨工业大学电气工程及自动化学院,哈尔滨150080)
对双Y移30°的六相永磁电机控制系统分析时,如果电机本体结构设计时各相绕组间互感可以忽略不计,可以将其看作2套三相子控制系统进行分析。参考常规三相半桥拓扑结构下电机的建模,对三相四桥臂拓扑结构下的子系统进行建模;在三相半桥控制系统空间矢量调制原理的基础上,提出了三相四桥臂的三维静止坐标系下的空间矢量调制原理;最后,对常见的一相故障提出两种容错控制策略,并利用仿真对控制策略进行验证。
双三相永磁同步电机;数学模型;三相四桥臂电压源逆变器;三维空间矢量调制;容错控制
引言
随着全球能源危机和环境污染问题的日益突出,人们普遍认识到节能减排是未来汽车技术发展的主攻方向。电动汽车作为新一代的交通工具,能够很好地应对能源、环保、安全等汽车可持续发展的几大问题[1-2]。基于电动汽车在节能环保不可比拟的优势,近年来国家对包括电动车在内的新能源汽车实施了很大的补贴扶持政策。电动汽车的动力源主要包括电池和超级电容两种,全部或部分由电机驱动,具有高可靠性的和安全性的电动汽车必须要有高可靠性的电机及其控制系统[3-4]。传统的三相电机,在绕组发生故障时,三相电机的转矩以及输出性能大幅下降,不利于实际工况的需要。相比于传统的三相电机,多相电机低压大功率输出和强容错能力的两大优点使其特别适用于供电电压本身有限且对控制系统可靠性有着较高要求的电动汽车等场合。
容错能力是多相电机重要特点之一,因此其控制方法得到了广泛研究。文献[5]提出了目前普遍使用的多相系统抗干扰法,通过调节故障后剩余相的电流幅值和相角,使得故障前后气隙磁场保持不变或者相当,电机故障后的性能不发生明显下降;文献[6]采用了解耦变换矩阵对双三相电机实现了磁场定向控制,研究了电机在故障发生后空间矢量非对称的解耦变化和旋转变化,将故障后的非对称电机模型转换为对称解耦模型,以此沿用对称模型下的电机矢量控制方法;文献[7]提出了故障状态分析的参数化方法,使得多相永磁无轴承电机一相开路时电机解耦数学模型不再受到不同开路状态的影响,解耦模型不再需要随着开路相的不同而改变,同时具体讨论了两相故障和三相故障的控制方法;文献[8]针对电流调节的多相电机驱动系统缺相运行提出了最优无扰的容错控制策略,缺相时以铜损最小、转矩波动最小为目标函数,求解得到剩余相电流。
在多相电机控制系统中,由于开关管损坏造成的断路故障是最为常见的故障之一,而一相断路故障在断路故障中发生的最为频繁,所以不同于文献[5-8]中的容错方法。本文以双三相电机为控制对象,基于一相断路的情况对中线补偿和最优电流两种容错方法进行了研究,对六相八桥臂拓扑结构下的矢量控制系统进行了分析和研究,在一相故障时运用中线补偿控制法和最优电流控制法对双三相相永磁同步电机控制系统的容错运行进行分析,将三相四桥臂拓扑结构的矢量控制扩展到了多相电机领域。
1 系统原理与电机模型
1.1逆变器拓扑结构选择
在六相电机控制系统中,比较常见的两种逆变器拓扑结构是六相半桥和六相全桥。对于六相半桥逆变器拓扑结构,优点是开关器件少,结构简单;缺点是没有中线引出,发生故障时需要将整套绕组切除,且各相电流没有实现独立控制。对于六相全桥逆变器拓扑结构,优点是各相电流独立,相间电隔离;缺点是开关矢量较多,导致空间矢量调制算法变得尤为复杂[9]。本文采用六相八桥臂逆变器拓扑结构,如图1所示。其主要优点如下:中性点引出可以实现容错控制,适用于不平衡负载运行[10];相比于六相全桥逆变器,六相八桥臂逆变器可以节省1/ 3的开关器件,同时具有良好的控制性能,适合于电动汽车等高可靠性、高功率密度的应用场合。

图1 六相八桥臂拓扑结构Fig.1 Topology of six-phase eight-leg VSI
1.2电机数学模型
双三相永磁同步电机是一个多输入、强耦合的非线性系统,为了简化分析,做出合理假设和规范正方向后[11],可以对电机进行建模。本文采用的样机与其他电机设计不同,每相绕组包含2个线圈,由于同相下的2个线圈绕向相反,每相绕组在其他绕组中产生的耦合磁路相互抵消而各相绕组不存在磁路耦合,即各相绕组的互感为0,这对多相电机的控制分析带来了极大的方便。
电机的定子电压方程为

式中:us、is为六相绕组定子端电压、电流;Rs为相绕组电阻;Ψs为六相绕组磁链。

式中:uA、uB、uC、uD、uE、uF为六相绕组定子端电压;iA、iB、iC、iD、iE、iF为六相绕组定子电流;ΨA、ΨB、ΨC、ΨD、ΨE、ΨF为六相绕组磁链;R为一相绕组电阻。
电机的定子磁链方程为

式中:L为一相绕组等效同步电感;Ψr为永磁体磁链幅值;θ为电机的转子位置角度。
电机的电磁转矩方程为

式中:Te为电磁转矩;ωm为电机的机械角速度。
电机的运动方程为

式中:J为转动惯量;TL为负载转矩。
考虑到双三相永磁同步电机是由2套三相对称绕组组成,可以将其看成2个三相子系统的组合,因此六相八桥臂的电机控制系统可以分为2个基于三相四桥臂拓扑结构的控制系统,只研究一组三相四桥臂控制方法即可,由此可以简化分析过程。矢量控制的基本思想就是通过坐标变换将交流旋转磁场等效为直流旋转磁场,从而能够实现励磁分量和转矩分量的解耦。
坐标变换主要可以分为3s/2s变换和2s/2r变换,即Clark变换和Park变换。由于采用三相四桥臂拓扑结构,与传统的坐标变换不一样,加入了一个独立的新变量i0,称为零轴分量。
Clark变换为

式中,θr为电角度。
利用坐标变换,可以得到电机电磁转矩的表达式为

式中:np为极对数;id、iq分别为定子电流的直轴和交轴分量;Ld、Lq为定子绕组的直轴和交轴电感。
由转矩表达式(7)中可以看出,电机的转矩Te与定子电流直轴分量id和定子电流交轴分量iq相关,在给定直轴分量id=0,且永磁体磁链Ψr保持不变时,其转矩仅与交轴分量iq相关,实现了直轴分量和交轴分量的解耦。与正常三相控制系统一致,如图2所示,可以采用转速、电流双闭环的控制结构。首先,确定给定转速nref,将给定转速与旋转变压器测得的转速信号n进行比较,经过转速PI调节器获得电流交轴分量给定iq*,电流直轴分量给定id*=0,由于中性点引出至第4桥臂N,控制系统增加了额外的零轴给定,在正常运行时给定为i0*=0;然后,对多相电机的各相电流进行采样,利用Clark变换和Park变换,将得到的实际电流直轴、交轴和零轴分量与给定值进行比较,通过电流PI调节器得到电压信号Ud*、Uq*、U0*,再经过Clark和Park逆变换,可以将电压信号转化为参考电压矢量作为矢量调制模块的输入信号,转速PI调节和电流PI调节决定了控制系统的响应速度和稳态性能。
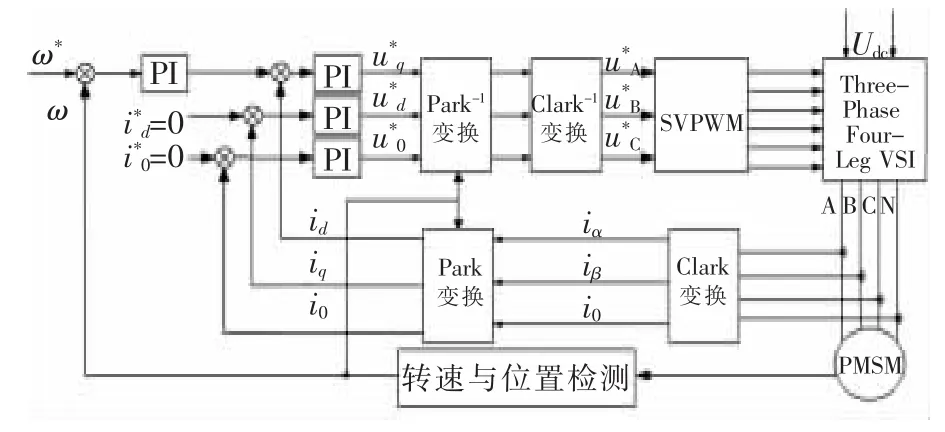
图2 电机矢量控制系统框图Fig.2 Block diagram of motor vector control system
2 SVPWM算法与系统仿真
2.1空间矢量调制算法
参考传统三相半桥逆变器控制系统的空间矢量调制原理,可以研究在三相四桥臂静止坐标系下的三维电压空间矢量调制原理SVPWM(space vector pluse width modnlation)。图3是三相四桥臂电压源逆变器VSI(voltage source inverter)拓扑结构框图。
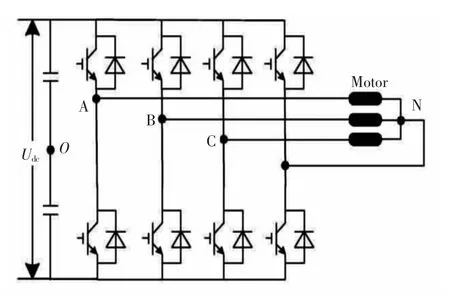
图3 三相四桥臂拓扑结构Fig.3 Topology of three-phase four-leg VSI

表1 开关状态Tab.1 Switch states
根据开关状态Sk的值得到开关状态表,其中k=1,2,3,4,上桥臂关断下桥臂开通记Sk=0,上桥臂开通下桥臂关断记Sk=1。为了开关状态表的简化,这里对母线电压标准化,即令Udc=1。对开关状态进行组合排序,以N=1为例,此时SA=0、SB=0、SC=0、SN= 0,则UAN=0、UBN=0、UCN=0。最终可以得到16个开关状态,如表1所示,根据开关状态及相电压组成的开关矢量U0~U15,进而可以得到空间正十二面体的运行空间[12],如图4所示。
下面要进行的工作是扇区的划分和扇区的判定,不难看出,可以利用以下6个平面对进行扇区划分,分别是UAref、UBref、UCref、UAref-UBref、UBref-UCref及UAref-UCref。可以看出,6个平面可以将整个正十二面体的控制区域划分为24个小的空间四面体,每个空间四面体可以由3个非零开关电压矢量和2个零矢量构成。并根据合成参考矢量实际大小对6个平面进行判断赋值于Ki(i=1,2,…,6),其值若大于等于0,则记为1;若小于0,则记为0。这样,取加权函数就能对扇区进行判断。以N=1为例,此时的空间四面体如图5所示。

图4 空间正十二面体Fig.4 Dodecahedron
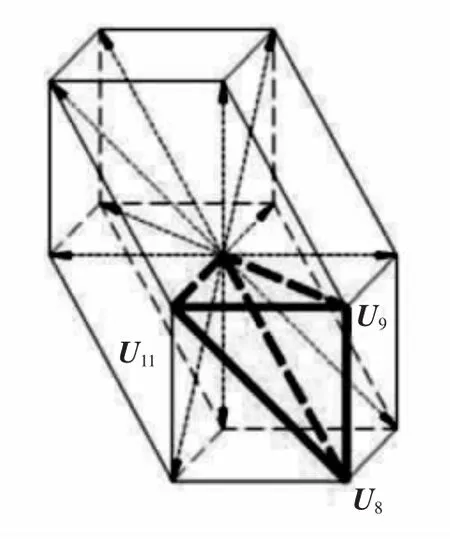
图5 N=1空间四面体Fig.5 Tetrahedron for N=1
同三相半桥控制系统一样,采用伏秒原则可以确定非零矢量和零矢量作用时间占空比,最后采用插入两零矢量中心对称的排序方式对开关电压矢量进行排序即可[13]。
2.2控制系统仿真研究
根据双三相电机的参数表2所示,可以对整个控制系统进行建模仿真,控制框图如图6所示。

表2 双三相电机参数Tab.2Machine parameters of DTP-PMSM

图6 双三相电机控制框图Fig.6 Block diagram of the DTP-PMSM control system
本文较为关注的是电机的转矩脉动,故在不考虑电机转速外环的情况下可以对电机的电磁转矩进行研究。给定id=0、i0=0、iq=10 A、ω=10 π rad/s,电机定子电压波形、电磁转矩波形及磁链运行轨迹观测,分别如图7~图9所示。

图7 定子电压波形Fig.7 Output voltage waveforms for each phase

图8 电磁转矩波形Fig.8 Output torque waveform

图9 磁链旋转轨迹Fig.9 Stator flux rotation track
由图可以看出,电机的电磁转矩脉动小,磁链运行轨迹为圆形,说明双三相电机在采用三相四桥臂空间矢量调制算法正常运行时能够符合电动汽车的工况要求。
3 控制系统容错运行
电机正常运行时,气隙磁场运行轨迹为圆形,定子合成磁势只包含正序分量;电机故障运行时,气隙磁场运行轨迹为椭圆形,定子合成磁势包括正、负序分量[15],所以电磁转矩存在较大的转矩波动,在电动汽车运行工况中是十分不利的。在多相电机控制系统中,缺相故障时比较常见的,而一相缺相故障在缺相故障中最为频繁,若不采取相应的容错控制策略隔离故障相,必然会造成磁路不对称,使得电机的转矩输出能力下降,转矩波动增大,电机剩余相的电流将大幅增加,情况严重时有可能对电机和控制器造成损坏。
传统的双三相电机控制系统发生故障时,通常将故障相所在的三相绕组直接切除,虽然该控制策略简单,但是容错运行时输出功率减半,且无法处理两套三相各有一相出现故障的情况。本文所提出的基于六相八桥臂拓扑的电机控制系统,运用等效控制和电流补偿两种容错算法对电机的电机故障中较为常见的一相缺相故障进行分析,两套三相绕组均能平稳工作,输出转矩稳定,主要针对控制系统中ABCN三相子系统为例进行研究。
3.1等效控制
等效控制是指保持故障前后电机的交、直轴电流iq、id不变,通过对电机的电磁转矩表达式(7)分析所知,保持故障前后定子电流具有相同的交直轴分量可以抑制缺相后产生的周期性转矩脉动,保证故障前后输出性可以保持一致[15-16]。根据2r/3s变换,在正常运行时,取i0=0,可以得到ABC三相电流,其空间相位差为2π/3;假设A相在某一时刻发生故障,令iA=0,可以求出此时零轴电流和BC相电流此时的给定值,即


采用id=0的矢量控制策略,在一相缺相时对零轴按式(8)进行补偿即可实现电机的容错控制,其故障前后定子电流如图10所示,由于这种方法是通过给定子中线电流,对定子的交直轴电流等效后进行的容错控制,所以可以简称为中线补偿控制,故障前后的电磁转矩如图11所示。

图10 容错控制后定子电流Fig.10 Output current waveforms after fault-tolerant control

图11 容错控制后电磁转矩Fig.11 Output torque waveform after fault-tolerant control
由图可以看出,0.1 s时A相发生开路,缺相后BC相电流幅值为缺相前的1.73倍,相位差由2π/3变为π/3,零轴电流此时不再为0,幅值变为缺相后BC相电流幅值的1.73倍,相位超前B相5π/6;缺相后对逆变器容量提出了要求,在额定负载时,剩余相电流幅值提高,但是输出转矩维持稳定,减小了转矩波动。运用该方法不仅可以解决双三相电机系统中一相断路故障,也适用于两套子系统中分别有一相断路的情况。
3.2最优电流容错控制
最优电流控制法是指对电机的电磁转矩进行分析,从而减小脉动转矩,提高输出性能[17]。给定电流值为

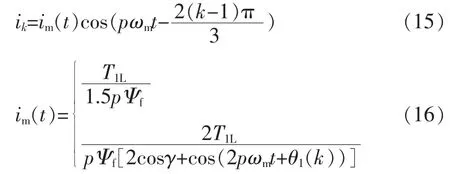
根据电机的电磁转矩式(3),可以计算出各相的电磁转矩为

式中:k=1,2,3分别表示A、B、C三相;γ为电流滞后角。可以看出电磁转矩有两部分组成:平均电磁转矩和相脉动电磁转矩,发生故障时不仅要对电机的有效转矩进行补偿,还需要对故障发生后的脉动转矩进行优化,缺相时有效转矩输出能力降低,电机在当前电流下提供电磁转矩的能力将会降低,在逆变器容量有相当的余量时,不考虑系统的降载运行,如何减小电机的转矩脉动便成为了故障运行分析的重点,将相脉动电磁转矩以向量形式表达为

由此可以根据电机绕组的空间位置表示出相脉动转矩的向量和A相发生故障时的相脉动转矩向量,如图12、图13所示。

图12 相脉动转矩向量Fig.12 Vector diagram of phase ripple

图13 故障后相脉动转矩向量Fig.13 Vector of phase ripple torque after failure
由图12、图13可以看出,系统正常运行时,两套三相子系统的相脉动转矩向量和为0,在此情况下,没有太大的转矩脉动,但是在一相发生故障后,相脉动转矩和不为0,此时有较大的相脉动转矩,其幅值和相角可以通过计算获得

由此可以根据系统正常运行和一相故障后输出电磁转矩的表达式,确定最优电流表达式,通过对剩余相电流的优化可以弥补有效转矩的损失和减小。由于缺相不对称产生的转矩脉动为
式中:k为剩余相,在A相发生故障后,k=2,3分别表示B、C相;T1L为A、B、C三相子系统的负载转矩,若按均功率分配,则T1L为总负载转矩的1/2。为了实现对非故障相的的独立控制,对第4桥臂N进行的控制,方式为
对控制系统进行仿真,仿真波形如图14、图15所示。由图14、图15可以看出,在故障前电磁转矩波动较小,当0.1 s一相故障发生后,电磁转矩波动明显增大,尤其是在重载的情况下,这对电动汽车的运行和电机的寿命十分不利;采用最优电流容错控制,电机的转矩波动明显减小,验证了控制策略的准确性。对整个控制系统进行最优电流控制算法后,可以看出,不同于基于磁势不变的容错控制算法,其容错后的电流不再是正弦电流,但是控制效果明显,解析过程简单明了,在容错控制后电磁转矩波动明显降低,由于是原负载继续运行,在缺相后为了弥补有效转矩的减小,剩余相电流有所增加。当双三相电机两套子系统各有一相发生故障时,可以在每个三相子系统中都采用上述方法进行控制;而如果发生的是属于一套三相子系统的相间两相故障,可以利用双三相控制系统的所有剩余相电流,继续形成圆形的旋转磁链使得电机继续稳定运行,本文不再详述。

图14 故障前后定子电流和转矩波形Fig.14 Output current and torque waveforms of pre-fault and post-fault

图15 容错控制后电流和转矩波形Fig.15 Output current and torque waveforms after fault-tolerant control
4 结语
本文以双三相永磁同步电机为控制对象,对六相八桥臂拓扑逆变器控制系统进行分析,相比于六相半桥拓扑结构,其中线引出,可以应对不平衡负载和缺相运行的电动汽车应用工况;相对于六相全桥拓扑结构,可以节省减少控制器的开关器件,降低系统成本,同时兼具一定的容错控制性能。在传统三相半桥的空间矢量调制算法的基础上,研究了三相四桥臂的三维空间矢量调制算法,通过对整个控制系统进行仿真,可以看出在正常运行的情况下其电磁转矩符合实际工况的要求。最后对电机的故障运行进行了仿真研究,针对一相缺相故障研究了两种容错控制算法,本文电动汽车的应用背景对减小电机在故障状况时的转矩脉动有重大意义。
[1]万钢.中国电动汽车的现状和发展[J].中国环保产业,2003(2):30-31. Wan Gang.State and development of electric cars in china[J].China Environmental Protection Industry,2003(2):30-31(in Chinese).
[2]陈清泉.电动车的现状和趋势[J].机械制造与自动化,2003,16(1):56-59. Chen Qingquan.The present situation of electric motor vehicle and its prospect[J].Machine Building&Automation,2003,16(1):56-59(in Chinese).
[3]李学兵,邱长军,王少力,等.绿色汽车的研究现状与发展方向[J].现代机械,2005(6):76-78. Li Xuebing,Qiu Changjun,Wang Shaoli,et al.The present condition and future of green vehicles[J].Modern Machinery,2005(6):76-78(in Chinese).
[4]Liu Guohai,Gong Wensheng,Chen Qian,et al.Design and analysis of new fault-tolerant permanent magnet motors for four-wheel-driving electric vehicles[J].Journal of Applied Physics,2012,111(7):713-714.
[5]Fu J R,Lipo T A.Disturbance free operation of a multiphase current regulated motor drive with an opened phase[J].IEEE Transactions on Industry Applications,1994,30(5):1267-1274.
[6]Zhao Yifan,Lipo T A.Modeling and control of a multiphase induction machine with structural unbalance part imachinemodelingandmultidimen sionalcurrent regulation[J].IEEE transactions on Energy Conversion,1996,11(3):570-577.
[7]Wang X L,Zhong Q C,Deng Z Q.Fault-tolerant control of multi-phase permanent magnetic bearingless motors[C]. 2010 IEEE International Conference on Electrical Machines,2010:1-6.
[8]Casadei D,Mengoni M,Serra G.Optimal fault-tolerant control strategy for multi-phase motor drives under an open circuit phase fault condition[C].18th IEEE International Conference on Electrical Machines,2008:1-6.
[9]李祥生,邓智泉,陈志达,等.电流型四桥臂开关功放控制方法[J].电工技术学报,2011,26(2):156-164. Li Xiangsheng,Deng Zhiquan,Chen Zhida,et al.A control method of current mode four-leg switching power amplifier[J].Transactions of China Electrotechnical Society,2011,26(2):156-164(in Chinese).
[10]Kim J H,Sul S K.A carrier-based PWM method for threephase four-leg voltage source converter[J].IEEE Transactions on Power Electronics,2004,19(1):66-75.
[11]Zhao Yifan,Lipo T A.Vector PWM control of dual three phase induction machine using vector space decomposition[J].IEEE Transactions on Industry Applications,1995,31(5):1100-1109.
[12]周实.三相四桥臂永磁同步电动机控制系统的研究[D].哈尔滨:哈尔滨理工大学,2013. Zhou Shi.Study on Three-phase Four-leg for PMSM Control System[D].Harbin:Harbin University of Science and Technology,2013(in Chinese).
[13]吴玉杨,张兴,杨淑英,等.三维空间矢量PWM调制算法及其仿真研究[J].合肥工业大学学报(自然科学版),2007,30(4):409-412. Wu Yuyang,Zhang Xing,Yang Shuying,et al.Study on the algorithm and simulation of three-dimensional space vector pulse-width modulation[J].Journal of Hefei University of Technology,2007,30(4):409-412(in Chinese).
[14]Wen Ouyang,Lipo T A.Modular permanent magnet machine with fault tolerant capability[C].The 24th Annual IEEE on Applied Power Electronics Conference and Exposition,Washington DC,USA,2009:930-937.
[15]穆晓敬,郝振洋.基于三相四桥臂逆变器的永磁容错电机控制系统[J].电源学报,2014,12(4):15-22. Mu Xiaojing,Hao Zhenyang.Research on fault tolerant permanent magnet motor control system based on threephase four-leg inverter[J].Journal of Power Supply,2014,12(4):15-22(in Chinese).
[16]刘勇超,葛兴来.三种三相四开关逆变器SVPWM策略内在联系[J].电源学报,2014,12(5):28-34,50. Liu Yongchao,Ge Xinglai.Relationship among three SVPWM strategies of three-phase four-switch inverter[J].Journal of Power Supply,2014,12(5):28-34,50(in Chinese).
[17]郝振洋,胡育文,黄文新,等.永磁容错电机最优电流直接控制策略[J].中国电机工程学报,2011,31(6):46-51. Hao Zhenyang,Hu Yuwen,Huang Wenxin,et al.Optimal current direct control strategy for fault tolerant permanent magnet motor[J].Proceedings of the CSEE,2011,31(6):46-51(in Chinese).
Simulation of DTP-PMSM Drive and Fault-tolerant Control System Based on Six-phase Eight-leg VSI
TONG Chengde,XU Bing,CHENG Luming,WANG Pengfei,ZHENG Ping
(School of Electrical Engineering and Automation,Harbin Institute of Technology,Harbin 150080,China)
For dual three-phase permanent magnet synchronous motor(DTP-PMSM)control system,with two sets of Y-connected windings phase shifted by 30 electrical degrees,if the mutual inductances of the winding can be negligible by the design of motor,the control system can be treated as two sets of three-phase sub-control system for analysis.So according to the modeling of conventional three-phase half-bridge topology motor,the mathematic model of three-phase four-leg topology control system can be established.Also on the basis of the three-phase half-bridge space vector pulse modulation(SVPWM),the new three-dimensional space vector PWM can be proposed.At last,two fault-tolerant control methods are proposed to deal with one-phase-open condition,and the simulation results are given to prove the control strategy.
dual three-phase permanent magnet synchronous motor;mathematic model;three-phase four-leg voltage source inverter(VSI);three-dimensional space vector pulse modulation;fault-tolerant control

佟诚德
10.13234/j.issn.2095-2805.2016.5.15
TM351
A
佟诚德(1983-),男,通信作者,博士,副教授,研究方向:电动汽车及其相关技术,E-mail:tongchengde@126.com。
许兵(1991-),男,硕士研究生,研究方向:电动汽车及其控制,E-mail:hsubing @hotmail.com。
程路明(1990-),男,博士研究生,研究方向:多相电机设计及其故障诊断,E-mail:hitchengluming@126.com。
王鹏飞(1985-),男,博士研究生,研究方向:多相电机及其控制,E-mail:wangpf@stepelevator.com。
郑萍(1969-),女,博士,教授,研究方向:电机设计及其驱动控制等,E-mail:zhengping@hit.edu.cn。
2015-09-28
国家自然科学基金资助项目(51407042);强电磁工程与新技术国家重点实验室(华中科技大学)开放课题基金资助项目(2015KF007)
Project Supported by National Natural Science Foundational of China(51407042);the Fund of State Key Laboratory of Advanced Electromagnetic Engineering and Technology in HUST(2015 KF007)
