多功能救火机器人的构建
2016-10-21朱雅乔
朱雅乔
(天津中德职业技术学院航空航天与汽车学院,天津 300350)
多功能救火机器人的构建
朱雅乔
(天津中德职业技术学院航空航天与汽车学院,天津 300350)
针对火灾救援的任务要求,研究了一款多功能救火机器人。基于模块化思想对机器人的本体、控制系统进行三维设计,进而对硬件平台进行搭建。通过WiFi控制软件连接样机,驱动样机完成灭火实验。从实验结果可知,机器人能满足设计要求。
救火机器人 ;三维设计 ;样机实验
0 引言
目前,火灾事故频发,在灾难事故现场亟需监视、监测与监控的载体。一款多功能救火机器人采用履带运动平台,具有较强越障能力的,非常适合执行灾难现场的搜索与侦查任务,运动平台搭载随动视觉系统及机械手,并预留传感器接口,可采集目标影像及环境信息、完成作业任务,通过WiFi控制模块与芯片串口通信,实现远距离控制,为灾难救援提供第一手信息。本文基于Pro/E对智能节能救援机器人进行结构设计,基于对机器人硬件及软件设计,能够带来更好的操控体验,提高工作效率。本机器人机身上设置有温度传感器,能够使机器人根据温度高低判断需要灭火的位置,报警器能够根据温度高低发出火警警报;同时设置在机身上的摄像头能够辅助操作人员获得灭火现场的环境信息,发送接收器能够使操作人员实现远程操作,有效的保护了灭火人员的安全[1-3]。
1 三维建模
1.1移动本体三维建模
本文采用pro/E进行三维建模。机身顶部设置有摄像头、温度传感器、报警器;行走机构;控制器,控制器连接有发送接收器,控制器上与行走电机电连控制行走电机转动,且控制器接收温度传感器温度信号控制报警器发出警示,发送接收器用以接收控制器发出或接收移动终端的信号。机器人整体采用金属材料,耐高温;采用履带行走机构,提高通过性;机身上装有散热装置,提高机器人的适应性;可旋转手臂提高灭火工作范围;温度、视觉等传感器的分布提高机器人感知现场的能力。
1.2控制系统三维建模
如图1所示,控制系统由控制模块、驱动模块组成。
2 机器人的硬件系统
MCU处理器——STC11F32XE,作为硬件系统的核心 。驱动板连接路由器并打开路由和驱动板电源,电脑WIFI设置DHCP自动获得WIFI-Robot无线信号,用WIFI-Robot 专用PC控制工具连接视频和控制端口,WIFI-Robot就能进行远程遥控控制和视频传输了。电机驱动芯片为L298系列,能满足机器人电机需求。电源稳压系统具有丰富的接口与资源(5路舵机驱动接口;路红外避障接口;1个TTL串口;1个红外一体化接收头;1个直流电源输入接口,7~15 V范围输入;1个5 V电压输出接口,标配1 A电流;6路LED可用于系统状态提示),为机器人功能拓展与延伸提供可能。
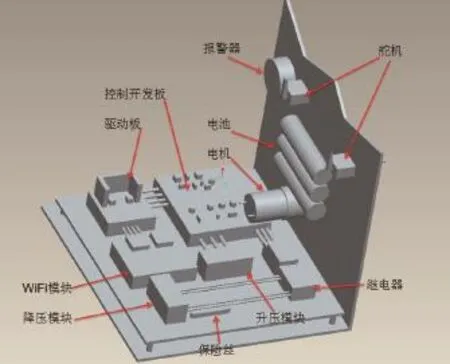
图1 控制系统布局
硬件系统的搭建:硬件系统搭建,如图2所示,其重要性不言而喻,最终的目的是尽可能减小机器人实际运动轨迹与期望目标的偏差,达到理想的运动精度。
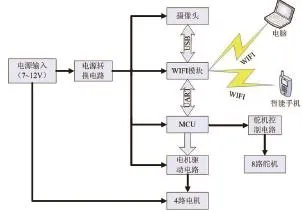
图2 机器人控制系统
3 机器人样机
3.1机器人控制软件
(1)机器人固件:更新方式简单,在GPL版权协议下使用C语言编写,并使用GNU bfin-elf-gcc或bfin-uclinux-gcc工具链编译。
(2)板载用户程序:主板内置C语言解释器支持专门的机器人类型命令以供用户程序运行。
(3)开发工具:GNU工具链。
(4)控制台软件:通过运行于Windows,MAC,Linux平台上的基于java的应用程序,连接内建于SRV1中的5、WebcamSat服务程序观看图像,并允许多人同时通过Internet远程观看。
(5)机器人控制协议。图像处理函数库。
3.2机器人样机
机器人样机如图3所示。

图3 机器人样机
WiFi控制(手机、电脑)、巡线、超声波壁障、无线视频传输。通过舵机、光耦继电器控制水泵的开关,达到喷水灭火的目的;通过舵机、水银开关控制蜂鸣器,达到报警目的;通过舵机控制钢丝拉杆,达到控制机器手的目的;外加备用电源,通过电容传感器,达到应急照明的目的。
4 结论
本文基于Pro/E对智能节能救援机器人进行结构设计,基于对机器人硬件及软件设计,能够带来更好的操控体验,提高工作效率。本机器人机身上设置有温度传感器,能够使机器人根据温度高低判断需要灭火的位置,报警器能够根据温度高低发出火警警报;同时设置在机身上的摄像头能够辅助操作人员获得灭火现场的环境信息,发送接收器能够使操作人员实现远程操作,有效的保护了灭火人员的安全。
[1] 赵娜.移动机械手路径规划与控制研究[D].天津:天津理工大学,2006.
[2] 李君.基于旋量理论的Stanford 臂的运动学分析[J].天津科技大学学报,2010,(4):72~78.
[3] 蔡蒂,谢存禧,张铁,等. 基于蒙特卡洛法的喷涂机器人工作空间分析及仿真[J].机械设计与制造,2009,3:161~162.
TP242
A
1671-0711(2016)08(下)-0084-02
