重型车辆制动性能的研究
2016-10-20贾莉郭海军蔡梦克
贾莉,郭海军,蔡梦克
(长安大学工程机械学院,陕西西安710064)
重型车辆制动性能的研究
贾莉,郭海军,蔡梦克
(长安大学工程机械学院,陕西西安710064)
建立了车辆受力的数学模型,液力缓速器的辅助制动、行驶阻力以及行车制动的子模型。利用Matlab/Simulink组建了重型车辆制动性能的仿真模型,其仿真包括重型车辆在平路和下长坡时分别利用液力缓速器以及液力缓速器与发动机联合作用下车辆从运行到停止的制动距离,制动速度和制动时间的变化,从而证明了重型车辆在液力缓速器与发动机联合作用下的制动效果更好。
液力缓速器;重型车辆;联合;仿真
得益于我国经济的发展,交通也变得尤为便利,但我国始终是一个多山地丘陵的国家,重型车辆进入山地也会遇到“上山容易下山难”的问题。随着车载质量的提高,车辆发动机功率的提高以及行车速度的不断增加,当车辆下长坡时制动系统变得尤为重要[1]。为了解决这一问题汽车辅助制动系统应运而生,按照装置的结构原理不同,汽车辅助制动系统可以分为排气制动、发动机制动和缓速器制动。缓速器制动又可以进一步划分为:电涡流缓速器、液力缓速器、永磁式缓速器和自励式缓速器[2]。本文以重型车辆为研究对象,对车辆在平路以及下长坡时液力缓速器的特性进行仿真。
1 液力缓速器及其参数[3]
本文研究的液力缓速器是长圆形液力缓速器,其综合考虑制造成本、加工的难易程度、安装条件等因素。根据某重型车辆的相关参数,利用相似设计法设计的缓速器结构参数如下表1所示。
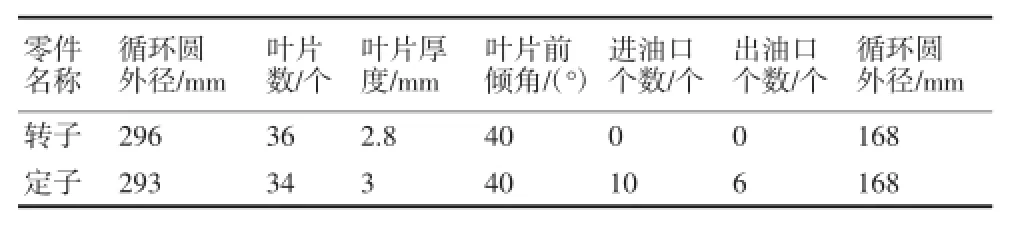
表1 重型车辆液力缓速器的结构参数
2 仿真模型的建立
2.1车辆制动受力数学模型
为了仿真模型的简便和准确,将仿真模型简化成一个双轴的刚体,不考虑悬架的阻尼和弹性,则当重型车在下长坡时受力状况如图1所示。
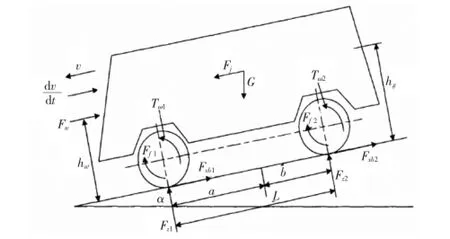
图1 整车受力分析
则在车辆的行驶方向得到受力平衡方程:
其中,Fxb1和Fxb2为地面对前后轮的反向制动力;Fw为空气阻力;Fz1和Fz2为地面的支持力;Fj为车辆平移质量惯性力;Ff1和Ff2为滚动阻力矩;Tω1和Tω2为旋转质量惯性矩;δ为车辆旋转质量的换算系数(这里取1);根据车辆长期行驶积累的经验得出计算f的公式:f=0.007 6+0.000 056v
2.2液力缓速器的辅助制动仿真子模型[4-5]
根据束流理论对液力缓速器三维流场模型进行简化,从而得到液力缓速器的缓速力矩与其各个结构之间的关系。由束流理论的假设和图可得到如下方程组:

式中:R,r为循环圆的外径和内径的半径;R1,R2为工作轮出口和入口处液中央线的半径;a1,a2为工作轮出口和入口处液流的流道宽度。
由工作液流的能量守恒可得:

整理方程可得关于求解vm的关系是如下:
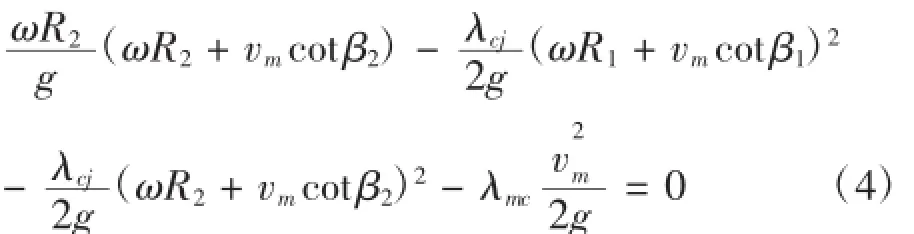
式中:HR为转子对油液做功的能头值;HS为油液对定子做功的能头值;为总的摩擦损失;λmc为摩擦阻力系数为总的冲击损失;λcj为冲击损失系数;β1和β2分别为叶轮出口和入口角β1=β2=90°-β.其中λcj和λmc都可以根据经验得到。
再由公式计算出循环流量Q,最终求得液力缓速器的制动力矩:

其中η为工作腔内的工作程度,即充液率。
液力缓速器仿真子模型如图2所示[6-7]。
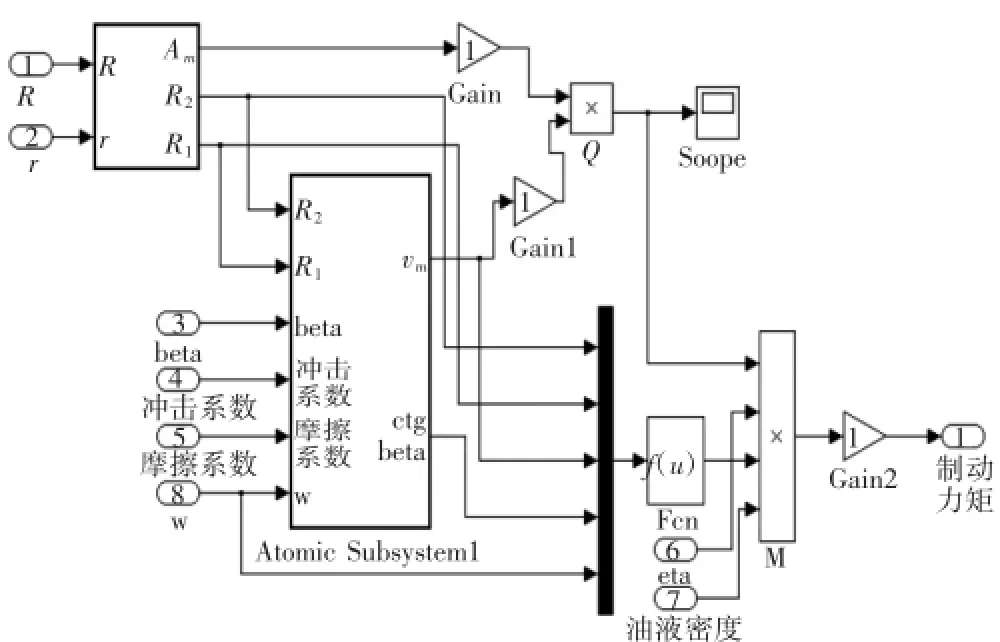
图2 液力缓速器辅助制动仿真子模型
2.3行驶阻力仿真子模型
车辆在下长坡时行驶阻力主要包括三方面,即滚动阻力Ff、空气阻力Fw以及坡道阻力mgsinα.对车辆行驶过程中的整车受力分析可知各个行驶阻力的数学表达式,由此搭建出行驶阻力仿真子模型,具体流程图如图3所示。
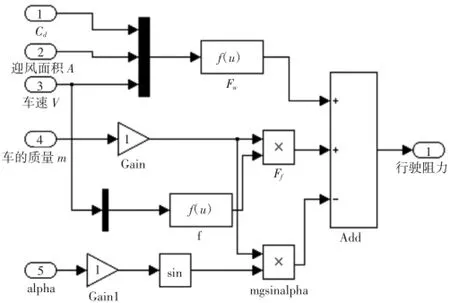
图3 行驶阻力仿真子模型
2.4行车制动的仿真子模型
车辆自身制动装置使用的是鼓式制动器,对车辆产生的制动力矩计算如下:

式中:P为制动器制动管道中的油压;P0为管道中的压力损失;BF为制动器制动系数;A为制动器泵的工作面积;r为制动鼓的半径;η为制动效率。由此搭建出的行车阻力仿真模型如图4所示。
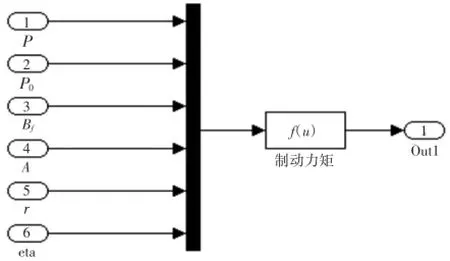
图4 行车制动器仿真子模型
3 车辆制动仿真分析[8]
Matlab控制系统仿真软件是拥有丰富的数据类型和结构,更友善的面向对象、更加精准方便的将描述表现到图像上。本文利用动态系统建模、仿真、分析,分别对充液率和制动方式进行控制,绘制出重型车辆在平路和下长坡时车辆的制动曲线。
3.1车辆在平路上的行驶仿真
假设车辆在良好的水平公路上行驶,其初始速度设置为65 km/h,变速器档位设置成5档,其速比为1.00,液力缓速器充液率分别为25%、50%、75%和100%.分别对车辆在只有液力缓速器参与制动和采用液力缓速器与发动机联合制动时的制动进行仿真。另假设车辆在制动过程中不会发生抱死。
由图5可以看出,在只有液力缓速器参与下的制动,充液率越高车辆停止所需要的时间越短,充液率从100%下降到25%时,车辆的制动时间由58 s减少到35 s.当液力缓速器与发动机联合作用时,相同的充液率的情况下制动时间明显减少。由此可以得出液力缓速器与发动机联合作用时的制动效果更好。
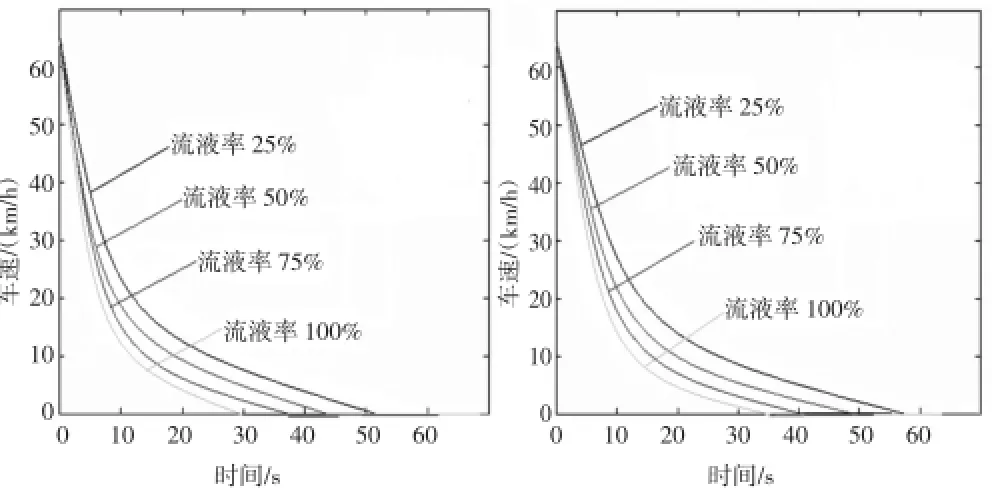
图5 液力缓速器单独作用和液力缓速器与发动机联合作用下的制动曲线
3.2车辆在下长坡时的行驶仿真
车辆在下长坡的制动仿真,假设车辆的初始速度为40 km/h,变速器档位设置成5档,其速比为1.00,液力缓速器充液率设置成100%,道路坡度值为6.分别对车辆在只有液力缓速器参与制动和采用液力缓速器与发动机联合作用时的制动进行仿真。另假设坡道足够长。如图6所示。
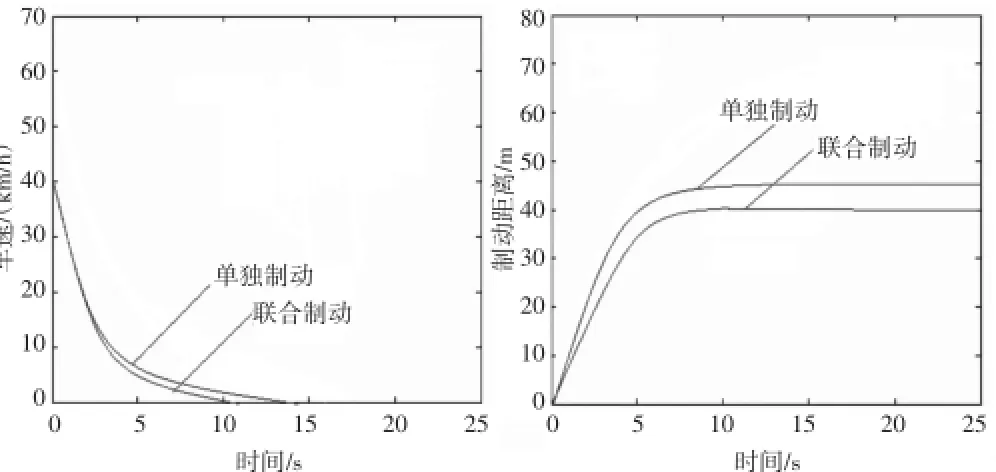
图6 液力缓速器与发动机联合制动的车速和距离曲线
由图6可以看出当充液率一定时(充液率为100 %),液力缓速器与发动机联合制动时车辆制动的时间明显小于只有液力缓速器制动时的时间,且制动距离也由42 m减少到36 m,由此可以得出液力缓速器与发动机联合作用时的制动效果更好。
4 结束语
本文建立了重型车辆液力缓速器的辅助制动、行驶阻力以及行车制动的子模型,并通过对重型车辆在平路和下长坡时的制动情况进行分析[9],可知:
(1)随着车辆充液量的提高,重型车辆的制动效果愈加明显。
(2)与只有液力缓速器参与的行车制动相比,液力缓速器与发动机联合制动时的制动效果更好。
[1]何仁.汽车辅助制动装置[M].北京:化学工业出版社,2005:35-42.
[2]刘维海.液力缓速器现代设计方法与整车制动性能仿真研究[D].长春:吉林大学,2006.
[3]黄榕清,吴磊,邵建华.汽车液力缓速器的原理及应用[J].汽车电气,2006,(11):6-8.
[4]高博麟.重型车与液力缓速器匹配特性的仿真研究[D].长春:吉林大学,2009.
[5]严军.车用液力缓速器设计理论和控制方法的研究[D].镇江:江苏大学,2009.
[6]叶磊,尹作发.基于matlab/simulink的车辆制动过程分析[J].公路与汽运,2006,12(6):5-7.
[7]贾云海,张文明.液力缓速器制动过程动态仿真研究[J].汽车技术,2009,(7):26-29.
[8]薛定宇,陈阳泉.基于MATLAB/Simulink的系统仿真技术与应用[M].北京:清华大学出版社,2002:118-192.
[9]施凯南.汽车液力缓速器辅助制动性能研究[D].西安:长安大学,2009.
Study on Braking Performance of Heavy Vehicle
JIA Li,GUO Hai-jun,CAI Meng-ke
(College of Engineering and Mechanical Engineering,Chang'an University,Xi'an Shaanxi 710064,China)
The math models of vehicles about force analysis,hydraulic retarder about auxiliary braking,vehicles about driving resistance and service brake system were established in this paper.The simulation model of braking performance was built by using Matlab/Simulink,which included heavy vehicles on a level road and long downhill the hydraulic retarder auxiliary braking system only,the association of hydraulic retarder auxiliary braking and engine system braking,and the change of braking length,braking speed and braking time.The simulation data showed that heavy vehicles had a better result on the association of hydraulic retarder auxiliary braking and engine system braking. Key words:hydraulic retarder;heavy vehicles;association;simulation
U467
A
1672-545X(2016)08-0058-03
2016-05-09
贾莉(1991-),女,河南郑州人,硕士,研究方向:公路机械化施工及质量控制。
