焊接滚轮架包角对筒体影响的有限元分析
2016-10-20李杨蔡业彬张兴芳
李杨,蔡业彬,张兴芳
(1.广东石油化工学院机电工程学院,广东茂名525000;2.太原理工大学化学化工学院,山西太原030024)
焊接滚轮架包角对筒体影响的有限元分析
李杨1,2,蔡业彬1,张兴芳2
(1.广东石油化工学院机电工程学院,广东茂名525000;2.太原理工大学化学化工学院,山西太原030024)
首先介绍了ANSYS求解接触问题的基本类型和接触单元的类型,确定了焊接滚轮架与筒体的接触是柔体—柔体的面—面接触问题。利用ANSYS软件分别建立了包角取50°、60°、70°、80°、90°、100°、110°的滚轮和筒体的有限元几何模型,分别进行接触分析,并对筒体的应力和位移进行分析对比。结果表明,若只考虑筒体的应力和变形,焊接滚轮架包角应选在60°~70°范围内,对包角的选取具有一定的指导价值。
ANSYS;焊接滚轮架;包角;筒体
焊接滚轮架是一种常用的焊接辅助装置,在焊接生产过程中被广泛应用。主要借助焊件与主动滚轮间的摩擦力带动圆筒类焊件旋转,与焊接操作机、焊接变位机等组合可实现对焊件的内外环缝、角焊缝和内外纵缝的自动焊接。焊接滚轮架与筒体的结构简图如图1所示,其中α表示两滚轮对筒体的包角。近年来,对焊接滚轮架的研究主要集中在滚轮架的轴向防窜动和自调式滚轮架的研制[1-4],对包角α的研究也仅限于传动过程,即当α<45°或α>120°时,都会使传动过程不稳定[5],并未涉及静态分析。因此,分析不同包角α对筒体的影响,对焊接滚轮架包角的选取具有重要意义。
筒体和滚轮属于接触问题,接触问题是一种状态非线性行为,传统方法是运用赫兹接触理论进行求解计算,但这种方法计算精度不高而且局限性较大[6]。随着有限元分析软件的发展,ANSYS可以解决所有赫兹接触问题而且计算精度较高,应用广泛。因此,本文利用ANSYS分析焊接滚轮架包角对筒体的影响。
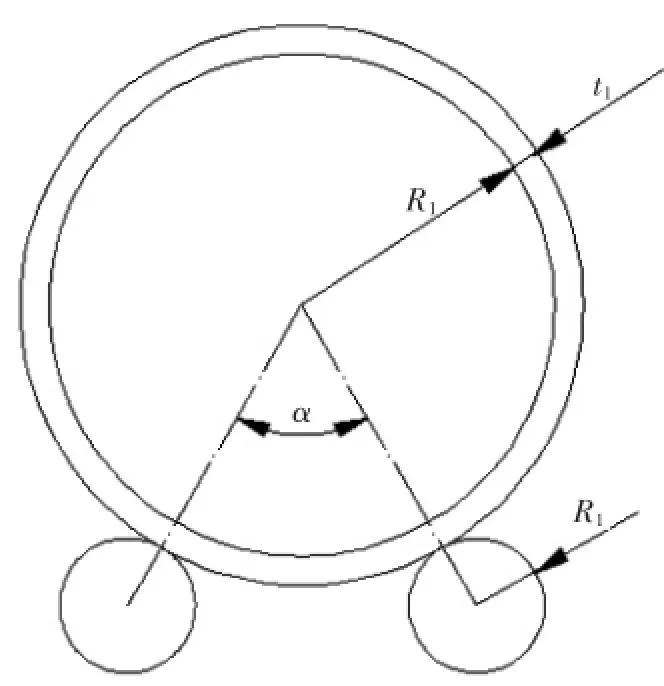
图1 焊接滚轮架与筒体的结构简图
1 ANSYS接触分析
1.1接触问题类型
接触问题有两种基本类型:刚体—柔体的接触和柔体—柔体的接触。一般情况下,一种软材料和一种硬材料接触可以被假定为刚体—柔体的接触,例如许多金属的成形问题;柔体—柔体的接触是一种更普遍的类型,两个接触体都是变形体[7]。筒体和滚轮的接触就是柔体—柔体的接触。
1.2接触单元类型
ANSYS支持三种接触方式:点—点接触、点—面接触和面—面接触。每种接触方式可选用不同的接触单元以适应于不同类型的问题。
点—点接触单元主要用于点—点的接触行为,使用这些单元,需预先知道接触位置,而且只适用于有较小相对滑动的接触面。对于大多数点—点接触问题,CONTA178单元是最好的选择。
点—面接触单元主要用于点—面的接触行为,使用这些单元,不需预先知道确切的接触位置,允许有大的相对滑动和大变形,且接触件间不需要网格保持一致。点—面接触单元有CONTA175、CONTA26、CONTA48和CONTA49,通常推荐使用CONTA175,因为它使用的单元数较少,且适用于大的摩擦滑动问题。
面—面接触单元主要用于面—面的接触行为,这些单元通过接触面和目标面形成接触对来模拟实体间的接触,且接触对共享一个实常号。目标面单元有TARGE169(2D)和TARGE170(3D),接触面单元有CONTA171(2D)、CONTA172(2D)、CONTA173(3D)、CONTA174(3D),这些单元可用于处理装配零件间的过盈配合等问题[7-9]。筒体和滚轮的接触选用面—面接触单元模拟。
2 问题描述
筒体材料为Q345R,焊接滚轮架材料为ZG35 CrMnSi,具体参数如表1所示。主要对不同包角α下的筒体进行有限元分析,讨论包角α对筒体的变形和应力的影响。JB/T 9187-1999《焊接滚轮架》中规定:焊接滚轮架每对滚轮的中心距必须能根据筒体类工件的直径作相应的调整,保证两滚轮对筒体的包角大于45°,小于110°.因此,包角α分别取50°、60°、70°、80°、90°、100°、110°进行分析。
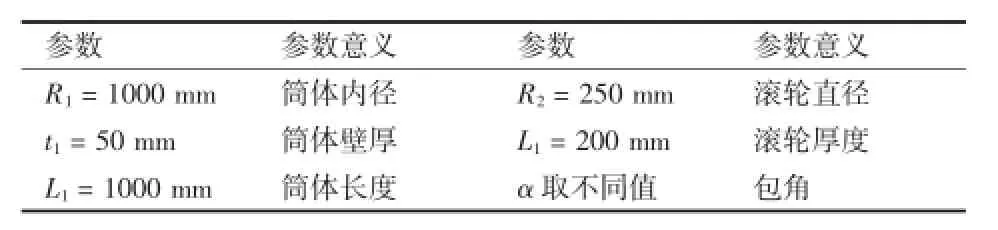
表1 筒体和滚轮的参数表
3 分析步骤
3.1定义单元和材料
由于滚轮和筒体的结构具有对称性,而且仅受重力影响,故取模型的二分之一进行有限元分析。采用SOLID45单元,该单元主要用于三维实体结构模型,具有8个节点,且每个节点有x、y、z三个方向的3个自由度。同时,具有塑性、徐变、膨胀、应力强化、大变形和大应变的能力。
选用各项同性材料,分别定义筒体和滚轮的材料常数,筒体和滚轮所用材料的材料特性如表2所示。

表2 筒体和滚轮的材料特性表
3.2创建几何模型和网格划分
根据表1中筒体和滚轮的尺寸建立几何模型(如图2所示),分别估计筒体和滚轮的接触区域,并用工作平面将筒体切割为三部分,为网格划分和定义接触对做准备。分别指定几何模型中各线段的单元等分数,然后用SWEEP方式进行网格划分,为保证计算精度同时减少系统的资源消耗,对筒体与滚轮接触区域进行网格细化(如图3所示)。
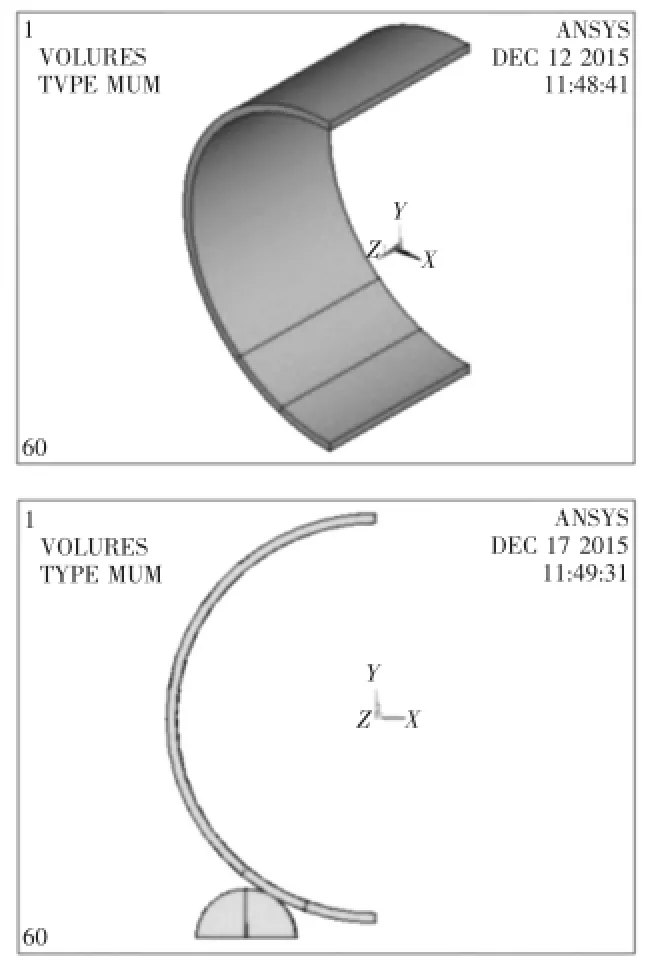
图2 筒体和滚轮架的几何模型(以α=60°为例)
图3 筒体和滚轮架的有限元网格模型(以α=60°为例)
3.3定义接触单元和接触对
接触面采用CONTA174单元,目标面采用TARGE170单元。根据接触面和目标面的选择准则[10],由于主要分析筒体的变形和应力,故将筒体接触部分视作接触面,将滚轮接触部分视作目标面,这两个面合起来称为接触对(如图4所示)。
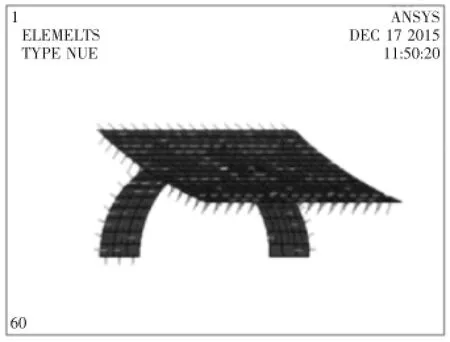
图4 筒体和滚轮架的接触对(以α=60°为例)
3.4设置边界条件
滚轮下端各节点施加全部约束,筒体对称面上各节点施加对称约束,同时施加Y方向重力加速度g=9.8 m/s2(如图5所示)。
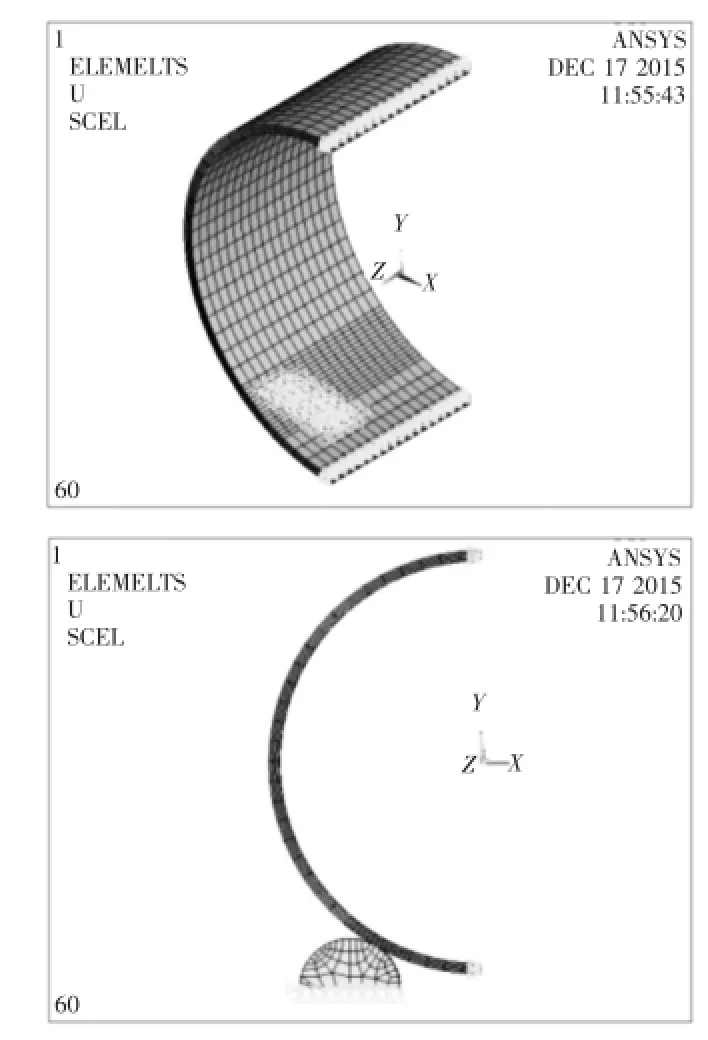
图5 筒体和滚轮架的边界条件(以α=60°为例)
3.5求解及结果分析
设置求解选项,打开自动时间步长和牛顿拉普森选项,开启线性搜索方式。选中所有节点和单元,求解当前载荷。求解完成后,可通过ANSYS的后处理功能显示筒体的等效应力云图(如图6所示,由于包角不同时等效应力云图相似,故只以α=60°为例)和总位移分布图(如图7所示),可以直观地看出筒体的受力与变形,并依此可绘制出不同包角下筒体的最大应力值和最大位移值的折线图(如图8所示)。
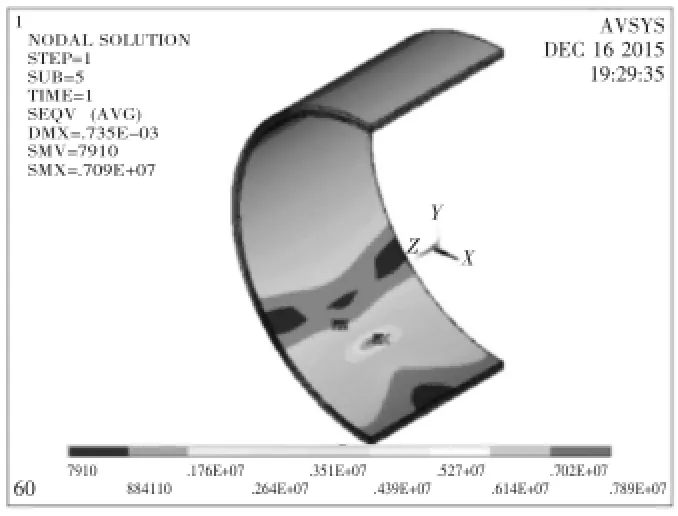
图6 筒体的等效应力云图(以α=60°为例)
(续下图)

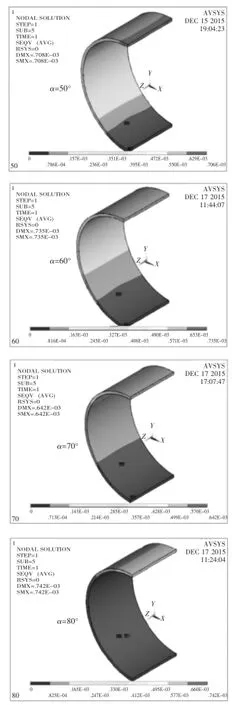
图7 筒体的总位移分布图

图8 不同中心包角下筒体的最大应力值和最大位移值
由图6和图8可知,筒体的最大应力出现在筒体和滚轮的接触区域,但接触处的相邻区域应力值相对较小,越靠近接触区域应力值就越大,可见筒体和滚轮的接触区域存在较大的挤压和磨损。而且,随着包角α的增大,筒体的最大应力值先减小后增大,且当α=60°时,最大应力值达到最小。
由图7和图8可知,筒体的最大位移也出现在筒体和滚轮的接触区域,接触处的相邻区域位移值也相对较高。而且,随着包角α的增大,筒体的最大位移值先减小后增大再减小,且当α=70°时,最大位移值达到最小;当α>90°时,最大位移值急剧增大,且α =100°时达到最大。此外,随着包角α的增大,筒体的最大位移值的范围也在增大,即滚轮对筒体变形的影响在增大,远离接触处的区域的位移值依然相对较高。
综上比较分析,若只考虑滚轮对筒体变形和应力的影响,滚轮架的包角α选在60°~70°范围内为宜,因为在这个范围内,筒体的最大变形和最大应力值相对较小。
4 结束语
综上分析得出:
(1)利用ANSYS软件,建立了不同包角的筒体和滚轮的有限元模型,进行了接触分析。
(2)筒体的最大应力和最大位移都出现在筒体和滚轮的接触区域,接触处的相邻区域应力值相对较小,但位移值依然较大。
(3)随着包角α的增大,筒体的最大应力值先减小后增大,且当α=60°时,最大应力值达到最小;而最大位移值先减小后增大再减小,且当α=70°时,最大位移值达到最小。
(4)随着包角α的增大,远离接触处的区域的位移值依然相对较高。
(5)若只考虑滚轮对筒体变形和应力的影响,滚轮架的包角α应选在60°~70°范围内,对焊接滚轮架中心包角的选取具有指导意义。
[1]罗生梅,陈利.焊接滚轮架上工件轴向窜动防窜机理研究[J].机床与液压,2007,35(8):74-75.
[2]颜平录.如何制造焊件轴向零窜动的焊接滚轮架[J].机械工人(热加工),2003,(3):6-7.
[3]陈利.智能防轴向窜动滚轮架系统的研究与开发[D].兰州:兰州理工大学,2007.
[4]李广周,刘玉虎,王刚.基于虚拟样机技术的自调心焊接滚轮架的研制与应用[J].天津科技,2015,42(10):52-54.
[5]于有生,张旭明,邹泽明.自调式焊接滚轮架的一个几何约束条件[J].焊接技术,2001,30(4):31-32.
[6]李峰,赵杰.应用ANSYS求解赫兹接触问题[J].机电产品开发与创新,2006,19(6):76-78.
[7]刘相新,孟宪颐.ANSYS基础与应用教程[M].北京:科学出版社,2006.
[8]钱俊梅,江晓红,仲小冬,等.浅谈基于ANSYS软件的接触分析问题[J].煤矿机械,2007,27(7):62-64.
[9]李一耕,陈锦江,龙超,等.基于ANSYS的球轴承赫兹接触问题有限元分析[J].机械研究与应用,2011,(5):35-37.
[10]姜卫忠.压力容器筒体与补强圈间的接触特性[J].压力容器,2003,(02):20-23.
Finite Element Analysis for the Influence of the Wrap Angle of Welding Roller Bed on the Barrel
LI Yang1,2,CAI Ye-bin1,ZHANG Xing-fang2
(1.College of Mechanical and Electrical Engineering,Guangdong University of Petrochemical Technology,Maoming Guangdong 525000,China;2.College of Chemistry and Chemical Engineering,TaiyuanUniversity of Technology,Taiyuan 030024,China)
The fundamental types and types of contact elements of ANSYS software in solution of contact problem were introduced.Then the contact of welding roller bed and barrel was determined to the contact problem of flexible body-to-flexible body surface-to-surface.And this paper used analysis software ANSYS to establish the finite element models of the roller and barrel of different wrap angle and executed the contact analysis respectively.Through compared and analyzed the stress and displacement of barrel,results showed that the wrap angle of welding roller bed is better in a range between 60°and 70°if only consider the stress and deformation of the barrel.This is valuable in the select of wrap angle.
ANSYS;welding roller bed;wrap angle;barrel
TG431;TH123.4
A
1672-545X(2016)08-0007-04
2016-05-16
广东省自然科学基金(编号:9152500002000003);广东省教育部产学研结合项目(编号:2010B090400237);广东省教育厅科技创新项目(编号:2012KJCX0076)
李杨(1991-),女,山西临汾人,硕士研究生,研究方向为化工装备制造与检测。
