一种改进的星载AIS信号侦收算法
2016-10-19饶坤**
饶 坤**
(中国西南电子技术研究所,成都 610036)
一种改进的星载AIS信号侦收算法
饶坤**
(中国西南电子技术研究所,成都 610036)
在分析传统侦收船舶自动识别系统(AIS)信号严重依赖全球定位系统(GPS)不足的基础上,提出了一种改进的侦收算法,利用同步序列的实时相关运算实现AIS信号的检测并达到位同步,进而完成解调侦收。改进后的算法不再需要GPS系统的辅助,简化了设计降低了成本,在13 dB的信噪比下误包率可以达到5%以下。
船舶自动识别系统;信号检测;位同步;解调侦收
1 引 言
船舶自动识别系统(Automatic Identification System,AIS)是一种船舶导航设备,集现代通信、网络和信息科技于一体,其技术标准由国际海事组织、国际电信联盟以及国际助航设备和航标协会共同提出。使用AIS系统可以使船舶避免发生碰撞,便于水上交通管理,在电子海图上显示船舶航迹,改进海事通信功能和提供一种船舶语音文本通信的方法[1]。对于AIS信号的侦收,不仅可以了解一定范围内的船舶情况掌握海事态势,而且对于反海盗、打击走私、海防安全以及收集敌情都有重要意义。
传统的AIS信号侦收方法[2]是利用全球定位系统(Global Positioning System,GPS)接收系统产生AIS标准时隙,然后严格按照时隙来完成信号检测、测频、位同步以及解调,其不足是算法严重依赖GPS系统,使得GPS的稳定性极大影响了AIS信号侦收的成败,而且在设计系统平台时必须考虑加装GPS系统。
本文在分析了AIS信号的基本特征以及传统的AIS侦收方法之后,提出了利用实时的同步序列相关运算来检测以及解调AIS信号的侦收算法,使侦收系统的设计得以简化。
2 AIS信号的基本特征
AIS系统工作在161.975 MHz和162.025 MHz两个信道上,调制方式为高斯滤波最小频移键控方式(Gaussian Filtered Minimum Shift Keying,GMSK),编码方式为不归零反转编码(Non-Return-to-Zero Inverse,NRZI),数据传输速率为(9 600±50)×10-6b/s。
AIS系统主要采用自组织时分多址(Self-organized Time Division Multiple Access,SOTDMA)技术,将物理信道的使用时间划分为固定长度的时间间隔,每一个时间间隔称为一个时隙(SLOT);将一分钟划分为2 250个时隙,构成一帧(FRAME),帧的开始和结束与协调世界时(Universal Time Coordinated,UTC)的分钟一致。AIS系统的时隙示意图见图1。

图1AIS系统时隙示意图
Fig.1 Slot diagram of AIS system
船舶用户在时隙内发送数据,数据采用如表1所示[3]的数据帧结构,自上向下逐比特发送。
表1数据帧字段说明
Tab.1 Description of data frame

名称长度/b说明上升阶段8射频功率和频率稳定时间同步序列240和1交替序列开始标记80x7E数据168帧校验序列16CRC校验结束标记80x7E缓冲24位填充、距离延迟等总计256
3 传统的AIS信号侦收方法
传统的AIS侦收系统组成及AIS信号处理流程如图2所示。该方法是通过在GPS信号接收系统的辅助下产生AIS标准时隙,利用AIS信号在时间上的特征,对每个时隙内采集到的信号先进行缓存,然后启动测频。完成频率测量后,在精测频的引导下,将AIS信号下变频滤波抽取得到基带信号,然后用1 b差分算法[4]得到0和1的数据流,在此条件下用同步序列进行相关搜索得到最佳采样点,从而实现位同步。在位同步的基础上提取出码元,同时对数据帧的结束标记进行搜索,搜索到结束标记后,将解调结果存储输出。

图2传统AIS侦收系统组成及信号处理流程图
Fig.2 Traditional system of AIS reconnaissance and signal processing procedure
在传统方法中,整个信号处理流程都是在AIS标准时隙的框架下进行设计的:按时隙缓存采样数据、按时隙启动频率测量、按时隙匹配同步序列实现位同步,而时隙的正确产生有赖于来自GPS接收系统提供的秒脉冲和UTC时间,因此GPS接收系统起到的作用非常关键,一旦GPS接收系统发生不稳定导致秒脉冲丢失或者无法提供UTC时间,使得AIS侦收系统的时隙与实际AIS信号的时隙发生偏差,这时整个信号处理流程将完全失效。
4 改进的AIS信号侦收算法
改进的AIS侦收系统组成及AIS信号处理流程如图3所示。AIS天线接收到的AIS信号进入AIS侦察接收机,经由信道模块进行放大滤波。信道模块中心频率为162 MHz,带宽为75 kHz。信号处理模块对信道模块输出的信号进行射频采样以及数字信道化,从而完成对AIS信号161.975 MHz和162.025 MHz两个频点的预处理。预处理的输出为每个采样点的瞬时相位θ(n),采样率为96 kHz。瞬时相位进行1 b差分算法处理后得到瞬时频率f(n)。信号检测算法对瞬时频率f(n)进行处理,实现测量瞬时频率中心值以及计算同步序列相关的功能。当同步序列相关运算结果超过设定的门限并达到最大时,达到位同步状态并找到最佳采样点,继而完成后续解调。

图3改进AIS侦收系统组成及信号处理流程图
Fig.3 Improved system of AIS reconnaissance and signal processing procedure
4.1FPGA中1 b差分算法的等效实现结构
因为AIS信号的符号速率为9.6 kb/s,所以在FPGA中进行预处理时,设计滤波抽取后的IQ数据的采样率为96 kHz,这时AIS信号每个符号有10个采样点,1 b差分算法可按公式(1)实现:
f(n)=θ(n)-θ(n-10)。
(1)
在FPGA中通过CORDIC算法[5]求相位θ(n),其取值范围为[-π,π),所以在使用公式(1)时存在相位模糊,并且由于θ(n)与θ(n-10)在采样点上不相邻,其模糊相位难以计算消除[6],也不便于FPGA流水线处理,因此需要将公式(1)改进为
f(n)=θ(n)-θ(n-10)=
θ(n)-θ(n-1)+θ(n-1)-θ(n-2)+…+
θ(n-8)-θ(n-9)+θ(n-9)-θ(n-10)。
(2)
公式(2)中将θ(n)与θ(n-10)之间的相位差转换为相邻采样点的相位差之和,不仅使模糊相位便于求解,而且运算结构便于FPGA流水线处理,其FPGA流水线处理流程图如图4所示。

图41 b差分算法的FPGA实现结构
Fig.4 Structure of FPGA realization of 1b differential algorithm
4.2AIS信号检测算法
AIS信号检测算法的框图如图5所示。
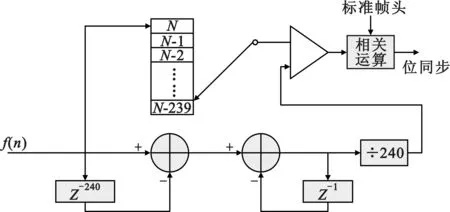
图5AIS信号检测算法框图
Fig.5 Block diagram of AIS signal detecting algorithm
本算法采用计算AIS同步序列相关峰的方式对AIS信号进行检测。为了做到每个采样点对AIS信号检测一次,需要对瞬时频率f(n)进行流水线缓存。因为在设计时使AIS信号每个符号有10个采样点,而AIS同步序列共24个符号,所以f(n)的缓存长度为240个采样点。由于星上侦收AIS信号存在较大的多普勒频偏,因此需要测量f(n)的中心值,即计算缓存下来的f(n)的均值fd。将缓存的f(n)与均值fd进行比较判决,大于等于fd则判为“1”,小于fd则判为“-1”。将240个缓存值的判决结果与标准同步序列进行相关运算,当计算出的相关峰值超过设定门限时,则判断AIS信号已经出现;随着采样的进行,继续计算相关峰值,当相关峰值达到最大时,则判断已经找到最佳采样点,实现了位同步,可以开始后续解调。
本算法在进行相关峰检测时采用了固定门限。当240个缓存值的判决结果全部正确时,计算出的相关峰值是240。实际应用中将容错下限设定为平均每个码元的10个采样点中出现1个采样点判决错误,在这种情况下计算出的相关峰值为192,以此为依据将固定门限设为192。
4.3AIS信号侦收算法的适用条件
多个船舶用户在不同时隙发送的AIS信号到达卫星平台,只要在时间上是错开的(即多个AIS信号在时域上没有重叠),就可以按照到达卫星平台的先后顺序依次被解调侦收;如果多个船舶用户发送的AIS信号到达卫星平台在时域上有重叠(即发生“信号碰撞”),则出现时域重叠的AIS信号不能用本算法侦收。
因为在FPGA内完成该算法大约需要360个系统工作时钟,在96 kHz的采样率下,FPGA的系统工作时钟需要大于34.56 MHz(即96 kHz×360)。
5 算法仿真与实际测试
本文在Matlab上对第4节提出的算法进行了仿真,图6给出了仿真结果。仿真输入的数据为基带的AIS信号IQ数据,如图6(a)所示。数据根据AIS标准按照表1的格式产生,采样率为96 kHz。考虑到星上接收信号的多普勒频移因素,测频是侦收流程中的一个重要环节,实际环境中多普勒频率范围是[-4 kHz,4 kHz],所以仿真时在IQ数据上增加了一个-1.5 kHz的多普勒频偏fd。图6(b)是计算出的每个采样点的相位值θ(n),它是1 b差分算法的输入,其取值范围为[-π,π)。图6(c)是根据4.1节的计算方法求出的瞬时频率曲线f(n)。图6(d)是根据4.2节的算法求出的相关值曲线,在相关值曲线上出现了3个极大值,3个极大值出现的时刻即为AIS信号实现同步的时刻。与图6(a)中的IQ数据进行比对,发现这3个极大值时刻正好与3个时隙AIS信号同步序列的结束时刻一致。这一结果表明本算法对AIS短时突发信号进行检测以及解调是有效可行的。
为了评估算法的性能,本文以有线的方式在实验室内进行了AIS信号侦收的测试,在测试中以误包率作为算法性能的考量指标。统计误包率时,以表1中从开始标记字段(0x7E)到结束标记字段(0x7E)的4个字段共200 b数据作为一个数据包。误包的定义为解调出的数据包中有错误比特或者漏包。漏包是因为在检测AIS信号时存在这样的情况:AIS信号实际存在,但是计算出的相关峰值低于门限,这就造成不能发现当前的AIS信号,从而导致漏包。在信噪比为13 dB(20 kHz带宽内信噪比)条件下,经过连续(大于1 h)的测试,误包率可以达到5%以下。
通常情况下,对于MSK连续信号的解调,13 dB信噪比的条件下可以达到1×10-4的误码率。对于AIS信号这种短时突发信号的解调,在不考虑检测概率(即检测概率100%)的情况下,以1×10-4的误码率推算出的误包率为2%。考虑到实际存在的检测概率,本文的实测误包率为5%应是一个合理值。工程上,对误包率这一指标的要求只需要达到15% 即可。

(a)IQ数据
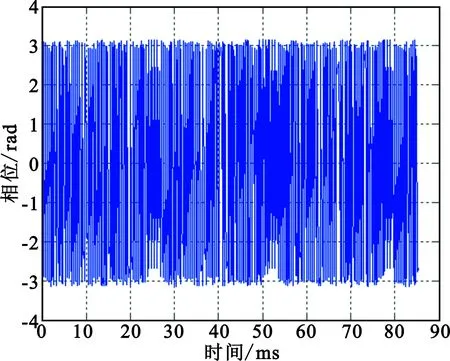
(b)相位曲线
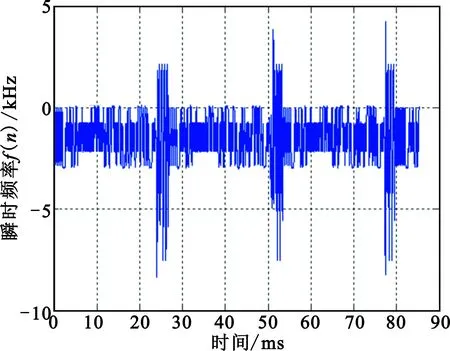
(c)瞬时频率曲线
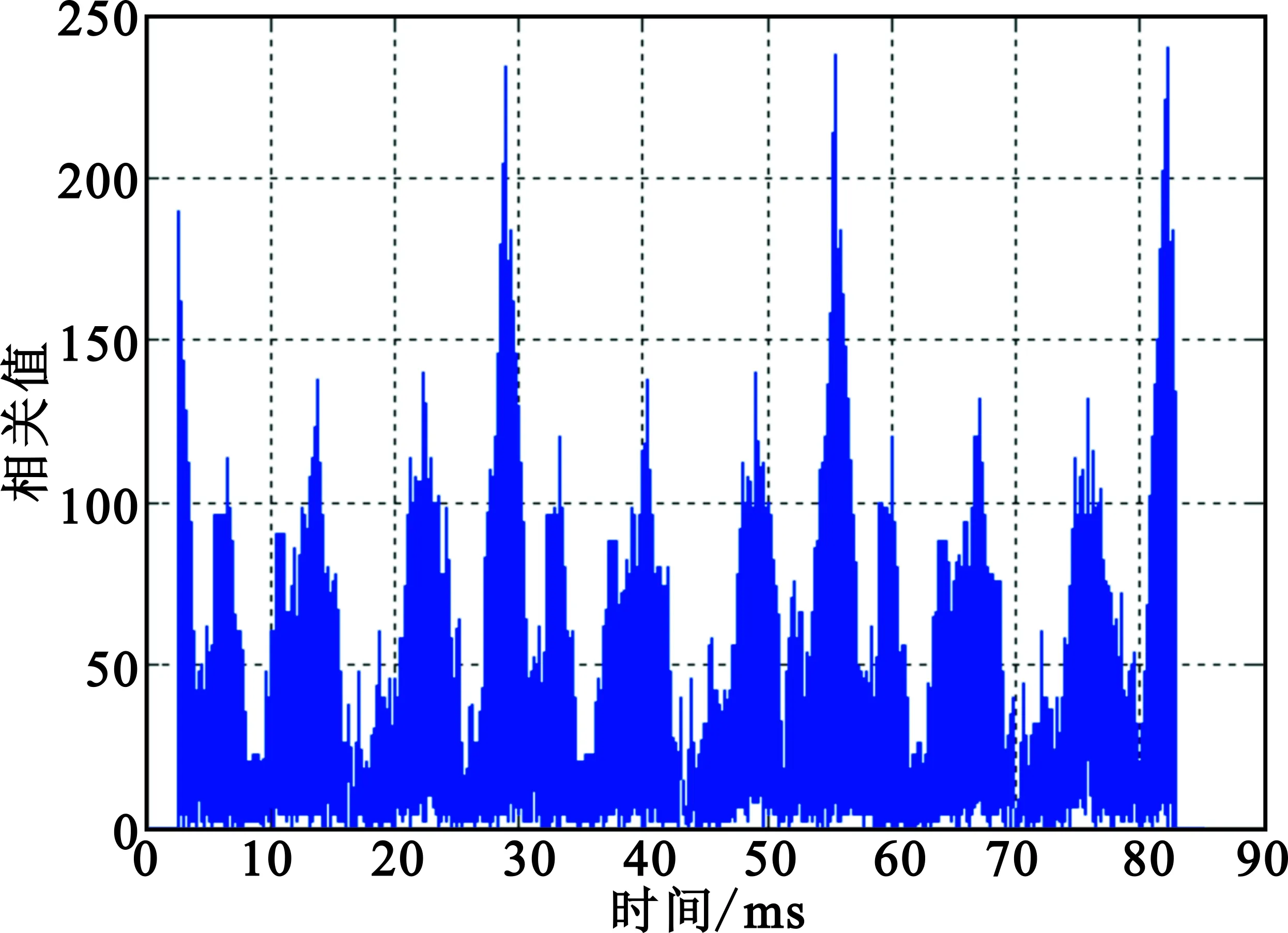
(d)相关值曲线
图6算法流程仿真结果
Fig.6 Simulation result of algorithm
6 结束语
本文提出了一种通过同步序列相关运算来实时检测AIS信号并达到位同步的星载AIS信号解调侦收算法。与传统的侦收方法相比,取消了对GPS系统的依赖,极大地简化了系统设计。该设计已经应用到实际工程中,测试检验了该设计的有效性和可靠性,满足了工程应用的需要。解决星上侦收AIS信号时会遇到的“信号碰撞”问题是需要进一步研究的内容。
[1]姚娜,蔡容海. AIS系统中GMSK的调制解调[J].电讯技术,2006,56(5):186-189.
YAO Na,CAI Ronghai. Modulation and demodulation of GMSK Signal of AIS system[J].Telecommunication Engineering,2006,56(5):186-189.( in Chinese)
[2]侯聪. 基于实时解调的AIS信号侦察[J].电讯技术,2012,52(7):1125-1128.
HOU Cong. AIS signal reconnaissance based on real-time demodulation[J].Telecommunication Engineering,2012,52(7):1125-1128.( in Chinese)
[3]中国国家标准化管理委员会.船载自动识别系统(AIS)技术要求:GB/T 20068-2006[S]. 北京:中国标准出版社,2006:1-62.
Standardization Administration of the People′s Republic of China.Technical requirements of shipborne automatic
identification system:GB/T 20068-2006[S].Beijing:Standards Press of China,2006:1-62. (in Chinese)
[4]曹志刚,钱亚生. 现代通信原理[M].北京:清华大学出版社,1992:262-270.
CAO Zhigang,QIAN Yasheng. Modern communication theory[M].Beijing:Tsinghua University Press,1992:262-270.(in Chinese)
[5]田耘,徐文波,张延伟. 无线通信FPGA设计[M].北京:电子工业出版社,2008:128-137.
TIAN Yun,XU Wenbo,ZHANG Yanwei. Wireless communication FPGA design[M].Beijing:Publishing House of Electronics Industry,2008:128-137.(in Chinese)
[6]杨小牛,楼才义,徐建良.软件无线电原理与应用[M].北京:电子工业出版社,2001:207-208.
YANG Xiaoniu,LOU Caiyi,XU Jianliang.Software radio principle and application[M].Beijing:Publishing House of Electronics Industry,2001:207-208.(in Chinese)

饶坤(1983—),男,湖北谷城人,2008年获硕士学位,现为工程师,主要研究方向为通信侦察领域信号处理及信号分析等。
RAO Kun was born in Gucheng,Hubei Province,in 1983. He received the M.S. degree in 2008. He is now an engineer. His research concerns signal processing and analysis in communication reconnaissance.
Email:raokun83@163.com
An Improved Signal Reconnaissance Algorithm of Satellite-borne AIS
RAO Kun
(Southwest China Institute of Electronic Technology,Chengdu 610036,China)
Through analyzing the disadvantage of traditional automatic identification system(AIS) signal reconnaissance depending heavily on global positioning system(GPS),this paper presents an improved algorithm which realizes AIS signal detection and bit synchronization according to the correlation result of synchronisation sequence in real time,and demodulates AIS signal successively. The improved algorithm doesn′t need to use GPS,resulting in a more simplified design and a lower cost. The package error rate(PER) is less than 5% at the signal-to-noise ratio of 13 dB.Key words:automatic identification system;signal detection;bit synchronization;demodulation reconnaissance
10.3969/j.issn.1001-893x.2016.09.015
2016-03-25;
2016-06-14Received date:2016-03-25;Revised date:2016-06-14
TN971
A
1001-893X(2016)09-1034-05
引用格式:饶坤.一种改进的星载AIS信号侦收算法[J].电讯技术,2016,56(9):1034-1038.[RAO Kun.An improved signal reconnaissance algorithm of satellite-borne AIS[J].Telecommunication Engineering,2016,56(9):1034-1038.]
**通信作者:raokun83@163.comCorresponding author:raokun83@163.com