基于微多普勒特征的单人与小分队分类技术*
2016-10-19罗丁利王亚军
罗丁利**,王 勇,杨 磊,王亚军
(西安电子工程研究所,西安 710100)
基于微多普勒特征的单人与小分队分类技术*
罗丁利**,王勇,杨磊,王亚军
(西安电子工程研究所,西安 710100)
人体行走是典型的非刚体运动,通常情况下每个人行走时的摆动周期不可能完全相同。通过提取目标频谱归一化幅度和、多普勒谱线数和谱宽的标准差3个典型特征,采用支持向量机(SVM)分类器,实现了短驻留时间条件下单人与多人的有效鉴别,平均识别率大于90%。雷达实测数据表明所提特征是有效并且稳健的。
行人分类;雷达参数设计;微多普勒;特征提取;支持向量机
1 引 言
人体的雷达微多普勒特征研究近几年受到了国内外学者的广泛关注。作为人体运动的独特特征,能够给分类识别提供附加的信息,在搜索救援、边防安检、医学监护等民用、军用领域有着广泛的应用前景。目前运动人体的雷达微多普勒特征分析与识别研究已经成为一个重要的研究领域。美国海军实验室的VictorC.Chen对人体微动特征的研究比较早,也比较系统[1]。他建立了运动人体的雷达回波模型,采用时频分析方法对行进人体进行了分析,包括前进、后退以及不同的步态特征进行了比较详细的分析。总的来讲,运动人体微多普勒研究主要包括3个方向:人体建模及微多普勒信号仿真[1-4];人体微多普勒特征提取[5-6];基于微多普勒的人体识别,包括单人的姿态识别[1,7]、单人多人识别[7]等。当人体微多普勒特征不明显时,蒋留兵等[8]提出了一种基于双谱特征的超宽带雷达静止人体及人体姿态识别方法,获得了较好的识别效果。
目前人体建模与微多普勒特征提取研究较为成熟,但是主要侧重于如何获得行人的微多普勒变化平面,而对如何提取特征实现单人与多人鉴别的相关文献相对较少。文献[7]利用人体不同步态下的目标回波分析了人体不同部分的微多普勒特征,对单人和多人分辨的问题进行了初步探讨,提出利用单人和多人的躯干分量的微多普勒的不同进行单人和多人的分类。但是,通过分析实测数据我们发现,要对不同人的躯干分量在多普勒维进行分离,需要雷达在多普勒维具有足够高的分辨率,即较长的驻留时间,这并不总能满足要求。本文主要针对有限积累时间内的单人与小分队分类问题进行研究。
2 雷达工作参数设计
基于微多普勒的目标分类识别技术要求雷达获得比较精细的目标多普勒频谱。为了比较好地获得人体的微多普勒信息,要求对窄带雷达的脉冲重复频率(PulseRecurrenceFrequency,PRF)、相参处理间隔(CoherentProcessingInterval,CPI)以及驻留时间(DwellTime)进行精心设计。下面基于工程设计经验,对3个参数的选取原则进行论述。
2.1脉冲重复频率
与运动刚体的单根多普勒谱线不同,运动人体的多普勒谱展宽非常严重。多普勒分量主要由躯干多普勒分量和四肢多普勒分量构成。躯干分量近似于是一个刚体运动,其速度中心v为人体的行进速度,本文通过大量的实测数据发现,四肢微多普勒分量速度范围分布在0~3v之间。因此,雷达脉冲重复频率选择要以人体多普勒谱不模糊为条件。比如:人体散步典型速度为1.5m/s,人体奔跑速度的极限为百米9.48s,即10.5m/s,那么四肢的最大速度为31.5m/s,雷达脉冲重复频率应该设计为不模糊速度至少为31.5m/s。这里雷达选取Ka频段,脉冲重复周期为60μs。
2.2相参处理间隔
人体行进中的运动周期和人体高度、速度、性别等因素相关。根据人体生理学特点,人体散步时胳膊的典型摆动频率为2Hz,跑步时人体胳膊的极限摆动频率为20Hz,即摆臂的时间间隔为50~500ms。因此,通常设计相参处理时间为数十毫秒级。为了获得人体运动时精细的多普勒变化规律,在工程实现过程中根据需要进行滑窗处理,即CPI之间可以存在一定的重叠数据,重叠数据的多少由信号处理单元运算能力及系统要求确定。这里选取CPI时间为30.72ms,1/4滑窗。
2.3驻留时间
为了获得人体的运动参数,通常要获得人体运动的多个运动周期数据。但是人体运动周期的范围很宽,因此驻留时间的设计通常要和人体速度相关。人体运动速度越低,驻留时间越长;人体运动速度越高,驻留时间越短。散步和小跑的人,驻留时间通常设计为2~3s。
本文的所有数据来源于实际雷达试验平台。雷达组成框图及实验照片如图1所示。该雷达工作于Ka频段,是一部高集成度调频连续波(FrequencyModulationContinuousWave,FMCW)雷达,重复周期内部作快速傅里叶变换(FastFourierTransform,FFT),完成频率距离转换;重复周期之间作动目标检测(MovingTargetDetection,MTD),完成杂波抑制与人体微动特征提取。本雷达对人体目标的作用距离可达1km。雷达的主要参数参见表1。

图1测量雷达框图及现场照片
Fig.1Diagramofmeasurementradarandsitephoto
表1雷达参数
Tab.1Parametersofmeasurementradar

工作频段体制辐射功率/mW相参积累调频带宽/MHz重复频率/kHzKaFMCW100MTD1516.7
3 杂波预处理
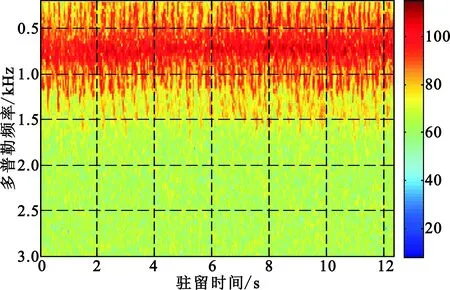
对于地面运动目标分类问题,要求在进行杂波抑制的同时尽可能地保留原始信号的频率成分。对于地面战场侦察雷达来讲,其工作时雷达一般是静止的,此时地杂波主要分布在零多普勒频率附近。在给定杂波谱宽度的情况下,可以利用CLEAN算法对杂波范围内的频率成分进行去除。CLEAN算法是一种从信号中去除特定的单频成分的方法[9],其一次实现可以去除给定信号中最大幅度对应的单频成分。若在特定的频带内多次使用CLEAN算法,则可去除该特定频带内的所有频率成分。单人目标杂波抑制前后的效果如图2所示。可以看出,CLEAN算法能够对地杂波进行抑制的同时,较好地保留目标的多普勒谱的结构。

(a)杂波抑制前
(b)杂波抑制后
图2利用CLEAN算法进行杂波抑制前后目标的时频平面
Fig.2Thetime-frequencyplanebeforeandaftercluttersuppressionusingCLEANalgorithm
4 基于实测数据的目标特性选择与提取
对于单人或小分队目标来说,其运动方向预先是未知的,因此应该考虑各种可能出现的情况。一种是各个目标之间的运动速度或运动方向不同,这时反映在雷达距离-多普勒平面上就是目标分别出现在不同的距离-多普勒单元,目标的数量明确,不需要进行目标数量的识别。第二种情况是小分队目标的各个成员处于同一个距离单元,且运动速度相近,运动方向相同,此时仅仅利用距离-多普勒信息无法对小分队和单人进行区分。本文正是针对后一种情况进行研究,结合实测数据进行分析与特征提取。在某段乡间公路,录取了单人和小分队行走的数据,目标的运动速度约2m/s。下面分别针对单人和小分队多普勒谱的特点进行分析。
4.1单人
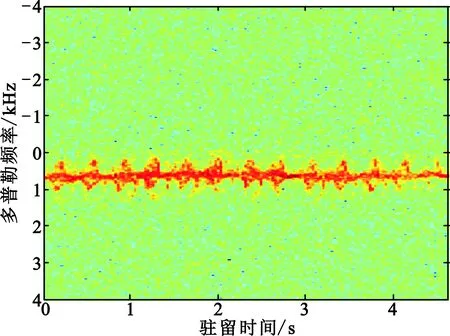
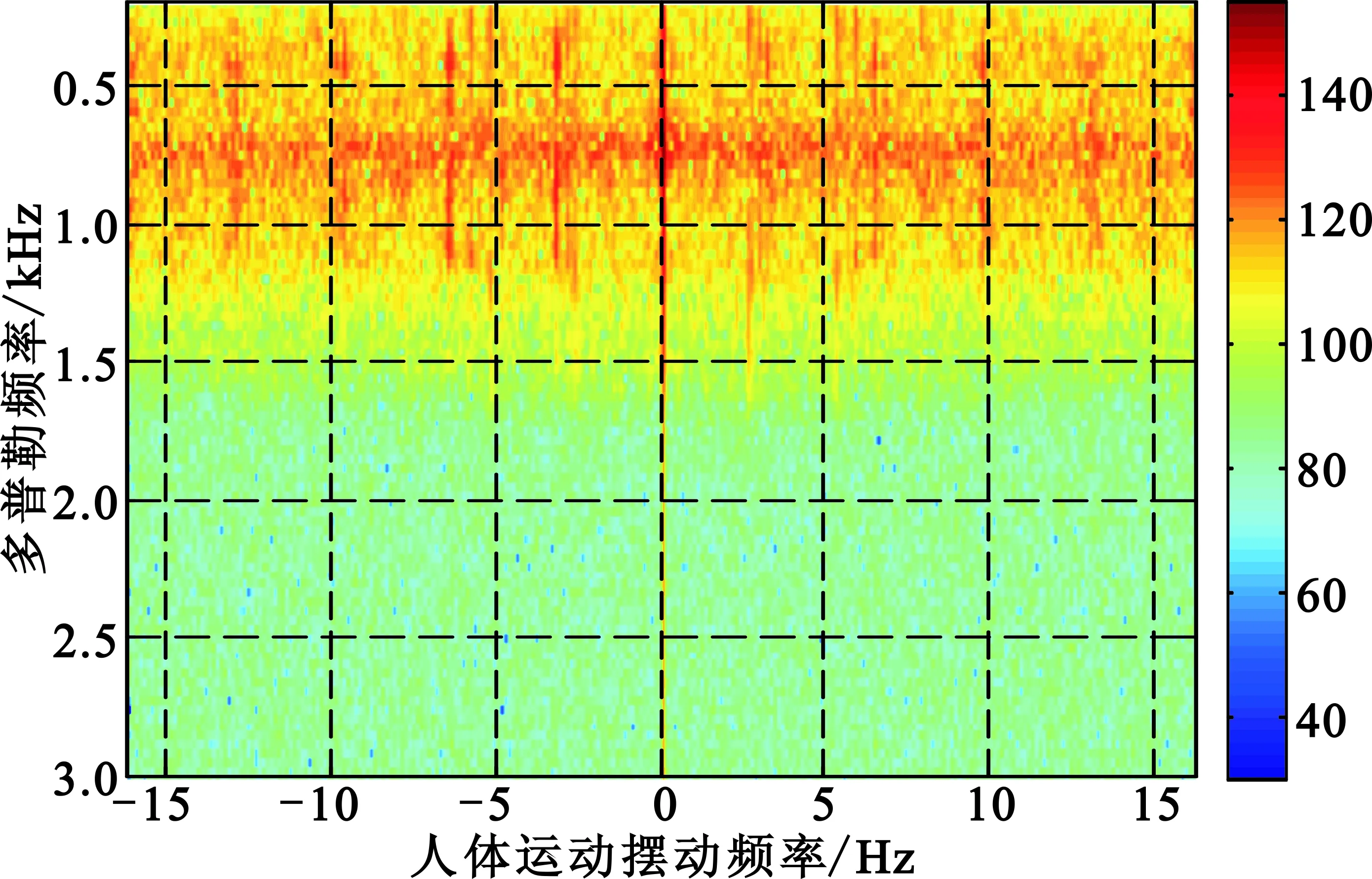
从单人回波的时频平面可以发现,单人的多普勒谱有以下特点:人体各部位的多普勒分量并不总是以躯干多普勒为中心对称,特别是对于多普勒起伏较大的手腕和脚踝分量;通过时频平面可以看出人体四肢存在较均匀的周期性摆动,即单人的微多普勒有周期性。对时频平面在慢时间维进行傅里叶变换,可以获得人体四肢的摆动频率。如图3(d)所示,人体四肢摆动频率为3.65Hz,由于人体四肢摆动过程类似于绕某个关节的圆周运动,所以,存在一定的周期性扩展,其分布类似于贝塞尔函数展开[1]。

(a)单人背站运动
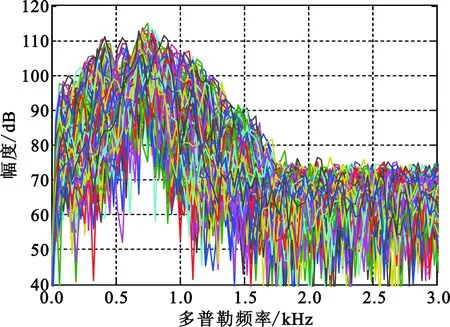
(b)单人多帧多普勒谱叠加
(c)单人多帧多普勒谱
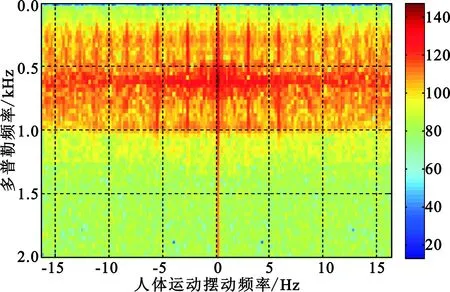
(d)单人的运动参数
图3单人的实测多普勒谱及运动参数提取
Fig.3ThemeasuredDopplerspectralandextractedparameterofindividualsoldier
4.2小分队
本文中小分队特指人数至少两人的具有近似运动速度和运动方向的目标。由于小分队中不同目标的摆动起始与周期并不完全一致,因此人数越多,小分队的多普勒分量越多。为了能够找到比较稳健的区分单人和小分队的特征,本文着重考虑两人与单人区分的情况。
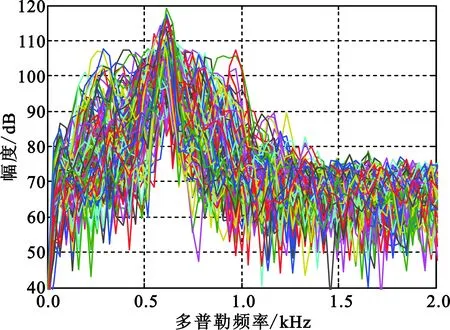
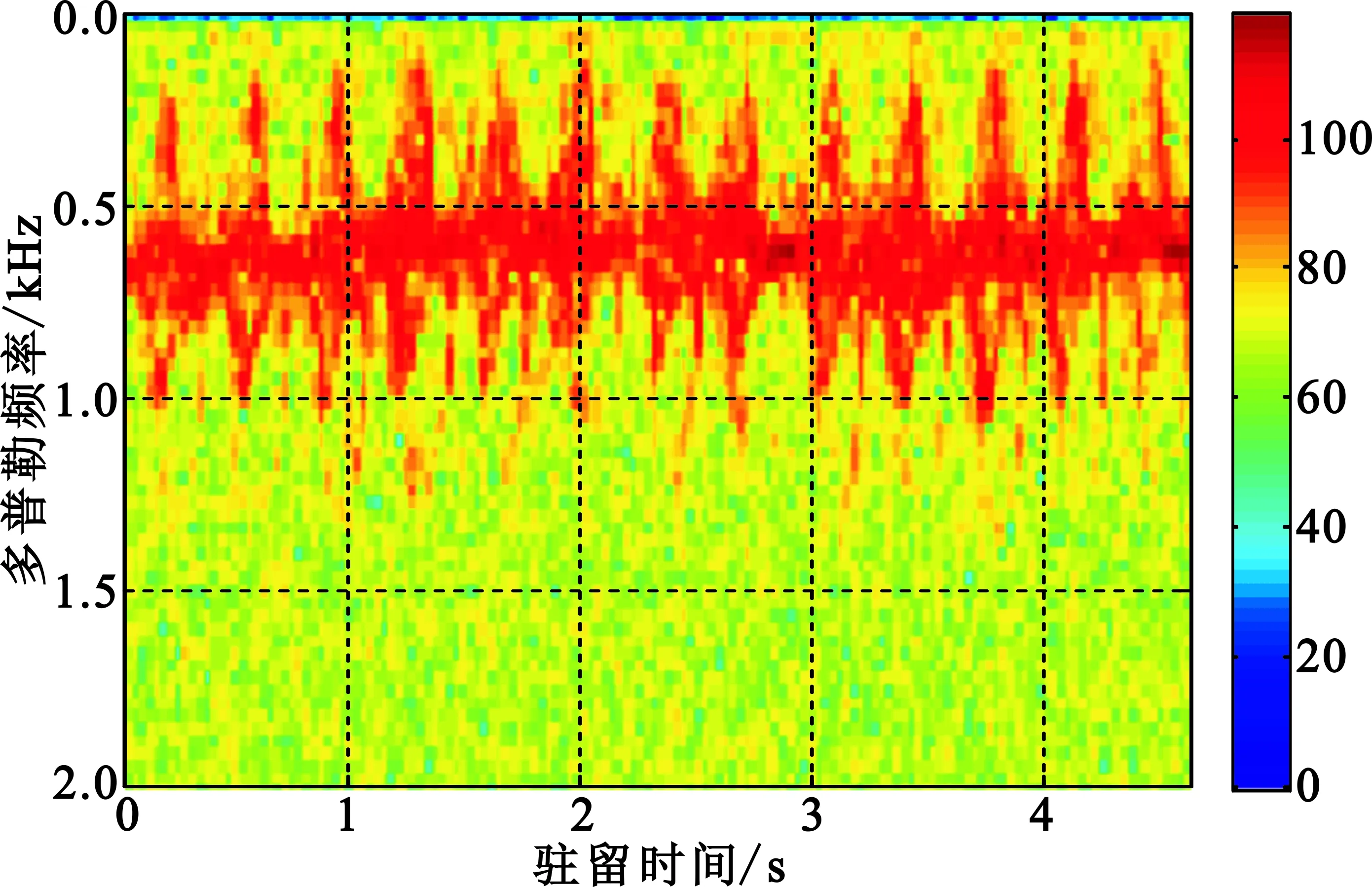
图4给出了小分队的多普勒谱及参数提取结果。从图4可以看出,小分队的单帧多普勒谱与单人的多普勒谱很相似,但是时频平面与单人的时频平面存在较大差异,特别是小分队成员步调不一致情况下,差异就更为明显。从驻留时间维来看,由于每个成员的多普勒的周期性不同,其叠加的频谱周期性已经完全被破坏。对驻留时间维做FFT,可以看出对于小分队提取人体的摆动频率参数比较困难。

(a)两人向站运动
(b)两人多帧多普勒谱叠加
(c)两人多帧多普勒谱
(d)两人的运动参数
图4小分队的实测多普勒谱及运动参数提取
Fig.4ThemeasuredDopplerspectralandextractedparameterofsmallgroup
4.3 特征提取
通过对单人和小分队的运动频谱进行分析,发现小分队的多普勒分量更多,而不同行人的四肢摆动不整齐导致小分队的运动参数较难提取。因此,提取3个反映多普勒分量多少的特征进行分类。
4.3.1特征1:归一化幅度和

(1)
式中:ts和te分别表示目标多普勒所处的范围。显然,小分队由于具有更多的微多普勒成分,归一化幅度和应该更大。图5给出了单人和小分队归一化幅度和的均值和标准差的分布直方图。从图5可以看出,单人归一化幅度和的均值和标准差较小,而小分队幅度和的均值与标准差较大,因此归一化幅度和能够较好地区分单人和小分队两类目标。

(a)归一化幅度和的均值

(b)归一化幅度和的标准差
图5归一化幅度和
Fig.5Sumofthenormalizedamplitude
4.3.2特征2:多普勒谱线数
显然,目标多普勒分量的多少直观地反映在其多普勒谱线的多少上,因此提取多普勒谱线数目特征,其定义为
f2=te-ts+1。
(2)
图6给出了单人和小分队多普勒谱线数的均值和标准差的分布直方图。从图6可以看出,单人多普勒谱线数的均值和标准差较小,而小分队多普勒谱线数的均值与标准差较大,通过多普勒谱线数能够较好地区分单人和小分队两类目标。

(a)多普勒谱线数的均值
(b)多普勒谱线数的标准差
图6多普勒谱线数
Fig.6Dopplerspectrallinenumber
4.3.3特征3:多普勒谱宽的标准差
由于单人行走时多普勒谱的周期较好,因此相同时间内谱宽的变化较小,而小分队中由于每个人四肢的摆动不可能完全一致,谱宽变化较大,这个差别可以用多普勒谱宽的标准差来表征。多普勒谱宽的标准差定义为
f3=std(te-ts)。
(3)
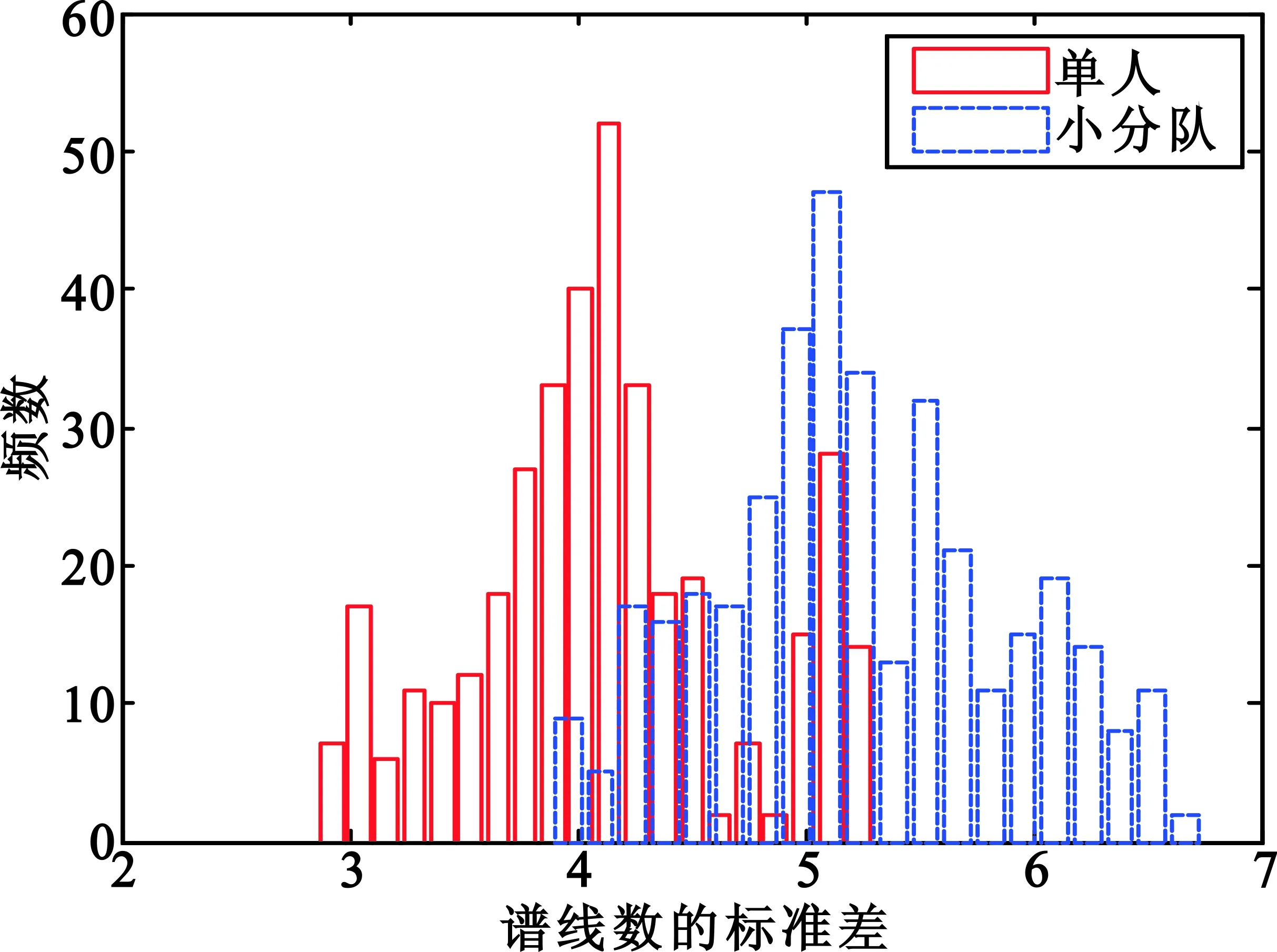
式中:std(·)表示求标准差操作。图7给出了单人和小分队多普勒谱宽标准差的分布直方图。从图7可以看出,单人的多普勒谱宽的标准差较小,而小分队的较大,多普勒谱宽的标准差能够作为区分单人和小分队的一个有效特征。

图7多普勒谱宽的标准差
Fig.7StandarddeviationoftheDopplerspectralwidth
5 实验结果
本文实验部分所用到的数据全部为第2节雷达试验平台采集的实测数据。雷达架设在一乡间小路边,单人和多人在雷达的主波束内进行直线靠近与远离运动。其中单人数据来源于身高不同的两个人,多人包括两人和三人两种情况;多人目标运动速度近似,运动方向相同,唯一的不同是小分队中不同目标的摆动起始和摆动幅度不总是完全相同。
本文采用支持向量机[10](SupportVectorMachine,SVM)进行单人与小分队的分类。训练样本各为742个,其中单人和小分队各371个(两人样本180个,三人样本191个),单人和小分队的测试样本各1 200个。图8给出了训练样本的归一化幅度和的均值、多普勒谱线数的均值与谱宽的标准差3个特征的三维分布以及支持向量。从图8中可以看出,单人和小分队的可分性非常好。利用SVM的总分类率为99.19%,支持向量个数为80个,对存储空间的需求较少。表2给出了单人和小分队分别的识别概率,可以看出,单人和小分队的识别概率均较高。
表2单人和小分队的识别概率
Tab.2Recognitionrateofindividualsoldierandsmallgroup

样本识别率/%单人小分队单人99.730.27小分队1.3598.65

图8单人和小分队的三维特征分布
Fig.8 3Dfeaturesdistributionofindividualsoldierandsmallgroup
为给实际应用提供参考,本文还评估了不同测试信噪比下的结果。所谓不同的测试信噪比,即指训练数据集采用高信噪比数据,而每次实验的测试数据集加入不同信噪比的白噪声以生成不同信噪比下的测试数据。这样评估的目的是为了检验所提方法对于噪声的稳健性。仿真采用蒙特卡洛方法进行独立试验,试验次数为100。信噪比指脉冲积累前的输入信噪比,相参积累脉冲数为512点。图9给出了不同信噪比下单人和小分队的识别率的平均结果和标准差。可以看出,单人的识别率一直比小分队的识别率高,并且受信噪比的影响较小。在0~5dB时,单人的识别率随着信噪比的增加有所下降,这是由于在低信噪比时,检测到的单人的微多普勒成分更少,反而更有利于单人的识别。对于小分队来说,随着信噪比的增加,识别率迅速提高。当信噪比高于10dB时,识别率大于90%。从平均识别率的角度看,当信噪比大于5dB时,平均识别率大于90%,因此所提特征在信噪比的一定变化范围内是稳健的。
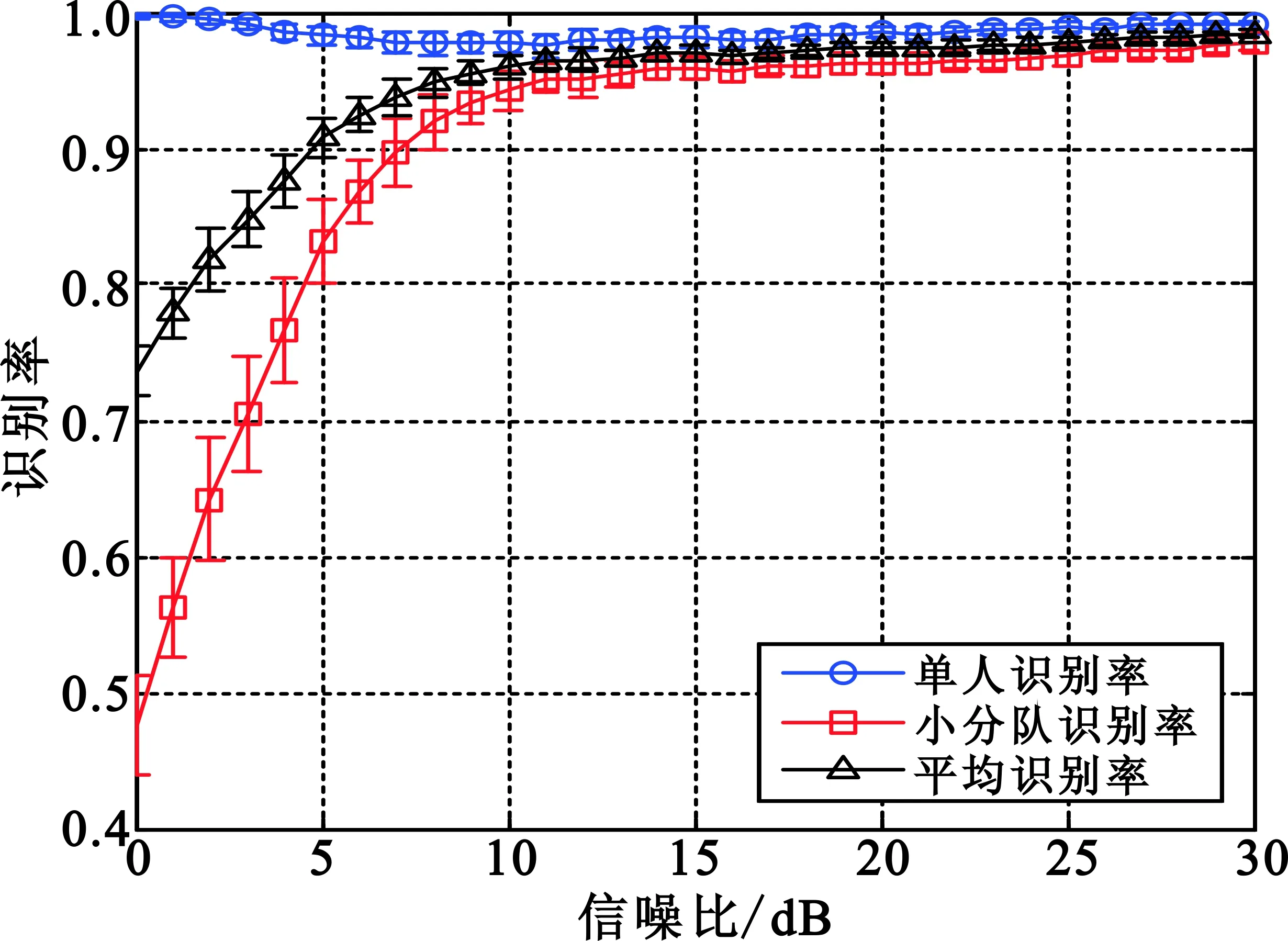
图9单人和小分队的分类识别率与单个脉冲输入信噪比的关系
Fig.9TherecognitionrateofanindividualsoldierandasmallgroupversusSNRofasinglepulse
6 结束语
本文通过提取归一化幅度和、多普勒谱线数和谱宽的标准差特征进行单人和小分队的分类识别,实测数据表明所提特征是有效的,而且在一定信噪比范围内是稳健的。本方法在搜索救援、边防安检等方面有着潜在的应用背景。需要指出的是,本文的单人与小分队分类方法主要利用了四肢微多普勒分量的不同,因此目标的运动状态对分类效果有一定影响,我们将在工程应用中进一步考虑。
[1]CHENVC.雷达中的微多普勒效应[M].吴顺君,杜兰,刘宏伟,译.北京:电子工业出版社,2013:145-171.
CHENVC.Themicro-Dopplereffectinradar[M].TranslatedbyWUShunjun,DULan,LIUHongwei.Beijing:PublishingHouseofElectronicsIndustry,2013:145-171.(inChinese)
[2]赵会宁,贺思三,冯存前.基于运动捕获文件的人体微多普勒信号仿真[J].计算机应用研究,2012,29(7):2766-2769.
ZHAOHuining,HESisan,FENGCunqian.Utilizingmotioncapturedfiletosimulatemicro-Dopplersignalofhumanbeings[J].ApplicationResearchofComputers,2012,29(7):2766-2769.(inChinese)
[3]孙忠胜,王俊,毕严先,等.基于广义S变换的多人微多普勒特征分析[J].系统工程与电子技术,2014,36(7):1291-1297.
SUNZhongsheng,WANGJun,BIYanxian,etal.Analysisofmulti-humanmicro-DopplersignaturesbasedongeneralizedStransform[J].SystemsEngineeringandElectronics,2014,36(7):1291-1297.(inChinese)
[4]张翼,程永强,朱玉鹏,等.人体目标雷达回波建模[J].系统仿真学报,2011,23(3):438-445.
ZHANGYi,CHENGYongqiang,ZHUYupeng,etal.Humantargetradarechomodeling[J].JournalofSystemSimulation,2011,23(3):438-445.(inChinese)
[5]贺峰,黄晓涛,刘承兰,等.行进人体目标雷达瞬时多普勒特征分析[J].信号处理,2010,26(9):1281-1288.
HEFeng,HUANGXiaotao,LIUChenglan,etal.RadarinstantaneousDopplersignaturesofpedestrian[J].SignalProcessing,2010,26(9):1281-1288.(inChinese)
[6]陈行勇.微动目标雷达特征提取技术研究[D].长沙: 国防科技大学,2006.
CHENXingyong.Researchonradarsignatureextractionfromtargetwithmicro-motion[D].Changsha:NationalUniversityofDefenseTechnology,2006.(inChinese)
[7]张翼.人体微动雷达特征研究[D].长沙: 国防科技大学,2009.
ZHANGYi.Researchonradarfeatureofhumanmicro-motion[D].Changsha:NationalUniversityofDefenseTechnology,2006.(inChinese)
[8]蒋留兵,吉雅雯,杨涛,等.基于双谱特征的超宽带需达人体目标识别[J].电讯技术,2015,55(9):953-958.
JIANGLiubing,JIYawen,YANGTao,etal.Ultra-widebandradarhumantargetrecognitionbasedonbispectrumfeature[J].TelecommunicationEngineering,2015,55(9):953-958.(inChinese)
[9]李彦兵.基于微多普勒效应的运动车辆目标分类研究[D].西安:西安电子科技大学,2013.
LIYanbing.Studyonclassificationofmovingvehiclesbasedonmicro-Dopplereffect[D].Xi′an:XidianUniversity,2013.(inChinese)
[10]BURGESCJC.Atutorialonsupportvectormachinesforpatternrecognition[J].DataMiningandKnowledgeDiscovery,1998(2):121-167.

罗丁利(1974—),男,陕西富平人,硕士,研究员,主要研究方向为雷达信号处理及目标分类识别技术;
LUODingliwasborninFuping,ShaanxiProvince,in1974.HeisnowaseniorengineerofprofessorwiththeM.S.degree.Hisresearchconcernsradarsignalprocessing,targetclassificationandrecognition.
Email:luodinglixian@126.com
王勇(1984—),男,陕西西安人,博士,高级工程师,主要研究方向为雷达信号处理及目标分类识别技术;
WANGYongwasborninXi′an,ShaanxiProvince,in1984.HeisnowaseniorengineerwiththePh.D.degree.Hisresearchconcernsradarsignalprocessing,targetclassificationandrecognition.
Email:364224826@qq.com
杨磊(1988—),男,陕西西安人,硕士,工程师,主要研究方向为雷达信号处理及目标分类识别技术;
YANGLeiwasborninXi′an,ShaanxiProvince,in1988.HeisnowanengineerwiththeM.S.degree.Hisresearchconcernsradarsignalprocessing,targetclassificationandrecognition.
Email:lyang624@126.com
王亚军(1983—),男,河南新乡人,博士,高级工程师,主要研究方向为数字波束形成和综合抗干扰技术。
WANGYajunwasborninXinxiang,HenanProvince,in1983.HeisnowaseniorengineerwiththePh.D.degree.Hisresearchconcernsdigitalbeamformingandanti-jamming.
TechnologyforClassifyinganIndividualSoldierandaSmallGroupBasedonMicro-DopplerFeatures
LUODingli,WANGYong,YANGLei,WANGYajun
(Xi′anElectronicEngineeringResearchInstitute,Xi′an710100,China)
Humanwalkingistypicalnon-rigidmotionandtheswingperiodsfordifferentmenareusuallynotsame.Throughexactingthreeeffectivefeatures,includingthesumofthenormalizedmagnitude,Dopplerspectrallinenumberandthestandarddeviationofspectrumwidth,aclassifierofsupportvectormachine(SVM)isusedtodistinguishanindividualsoldierandasmallgroupforshortdwelltime.Theaveragerecognitionrateismorethan90%.Theexperimentsshowthattheproposedfeaturesareeffectiveandrobust.Keywords:humanclassification;radarparameterdesign;micro-Doppler;featureextraction;supportvectormachine
10.3969/j.issn.1001-893x.2016.09.004
2016-01-04;
2016-05-04Receiveddate:2016-01-04;Reviseddate:2016-05-04
TN957.5
A
1001-893X(2016)09-0969-07
Email:dreamer_gk@163.com
引用格式:罗丁利,王勇,杨磊,等.基于微多普勒特征的单人与小分队分类技术[J].电讯技术,2016,56(9):969-975.[LUODingli,WANGYong,YANGLei,etal.Technologyforclassifyinganindividualsoldierandasmallgroupbasedonmicro-Dopplerfeatures[J].TelecommunicationEngineering,2016,56(9):969-975.]
**通信作者:luodinglixian@126.comCorrespondingauthor:luodinglixian@126.com