全自动酶免超声法液面探测系统设计
2016-10-19甘宜梧谢清华郭宣成
甘宜梧 谢清华 郭宣成
全自动酶免超声法液面探测系统设计
甘宜梧①谢清华①郭宣成①

目的:设计全自动酶免超声法液面探测系统,实现对液体的液面情况进行精确探测,以满足全自动酶免工作站性能要求。方法:针对当前存在加样针必须向下移动一次方可得知液面情况、对导电性能差的液体无效等缺陷,设计一种超声法液面探测系统。由微处理器发出控制信号,控制超声波信号发生器芯片发出超声波信号,使其在遇到试管或微孔板反应孔中的液面时发生反射。结果:通过接收反射的回波信号,送往微处理器进行信号处理,能够达到液面探测的目的。结论:将超声法应用至液面探测系统,能够克服液面探测过程中的缺陷,提高移动液体精度,同时可避免交叉污染,符合全自动酶免工作站完成临床检验的要求。
全自动酶免;液面探测;超声波;LM1812芯片
[First-author’s address] Biobase bioindustry (Shandong) Co.,Ltd, Jinan 250101, China.
全自动酶免工作站可以全自动完成酶联免疫吸附测定法(enzyme-linked immune sorbent assay,ELISA)试验,并提供高效、快速及准确的自动化免疫学实验解决方案[1]。在ELISA实验中,加样加试剂是其中一个非常重要的环节,因而液面探测系统是其不可或缺的一项功能组件,也是其中一项非常重要的环节。移液过程中,既需要提高移液精度,又需要最大程度的避免交叉污染,二者均直接影响到全自动酶免工作站的检验结果,且备受人们关注[2]。
1 超声波探测方法
目前的全自动酶免工作站中,多采用接触式液面探测(liquid level detection,LLD)技术,即只有当移液针接触到被移样液体时方能探知液体的存在,进而探知液面高度的方式,其中电容法使用最为广泛[3]。接触式LLD技术存在以下3个缺点:①移液针必须要向下运动完成一次探测动作后方能得知样本是否缺失
①山东博科生物产业有限公司 山东 济南 250101或耗尽;②对缺失和耗尽的样本该探测动作成为无效动作,从而降低了仪器运行速度;③当瓶盖忘记取下时移液针会损坏,且电容法LLD技术存在原理性缺陷,即对导电性能差的液体无效。
超声波探测方法作为一种非接触式LLD技术,其测量精度最高可达0.005 mm,甚至可以测量口径仅为3.2 mm的微小试管内的液面。因此,该方法能够在克服接触式LLD技术缺点的基础上,提高移液精度,同时更大程度的避免交叉污染,从而更好的满足全自动酶免工作站的检验要求。
2 超声法液面探测系统设计
本研究提出一种超声法液面探测系统,由微处理器发出控制信号,控制超声波信号发生器芯片发出超声波信号,在遇到试管或微孔板反应孔中的液面时发生反射,通过接收反射的回波信号,送往微处理器进行信号处理,从而达到液面探测的目的[4-5]。
超声法探测液面系统由超声波信号发射、回波信号接收、信号放大以及信号控制处理等部分组成(如图1所示)[6]。
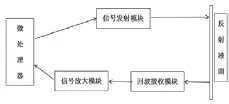
图1 超声法液面探测系统框图
3 超声法液面探测系统部件
3.1信号发射与接收
(1)信号收发部分。为使电路更简洁,选用可同时实现超声波信号收发的通用型超声波集成器件LM1812芯片,通过8051微处理器控制LM1812芯片实现超声波信号的发射与回波信号的接收,并将接收后的回波信号接入二级放大电路进行信号放大,而后送入微控制器进行数据分析处理[7]。
(2)LM1812超声波专用器件外形为18脚双列直插塑料土封装形式,相应引脚1脚第二增益级输出→振荡器端,6脚发射器输出端,7脚发射驱动器13脚外接电源退耦电容端,14脚检出器输出端,16脚输出驱动器端,17脚噪声控制端,18脚积分器复位时间常数控制端[8]。超声波信号由控制器控制LM1812芯片发出后,在遇到试管或微孔板反应孔中的液面时发生反射,通过微控制器控制LM1812芯片转变为接收模式,接收反射后的回波信号。
3.2信号放大与处理
(1)信号放大部分。该部分采用两级放大的方式进行信号放大,将接收到的超声波回波信号接入运放器进行信号放大,方便更准确的进行信号分析与处理[9]。
(2)信号处理部分。采用的8051微控制器为混合信号系统级芯片,具有48个数字输入输出引脚,5个通用的16位定时器,5个捕捉比较模块的可编程计数器阵列[10]。采用流水线结构,指令执行速度大幅度提高,70%的指令执行时间为1个或2个系统时钟周期,只有4条指令的执行时间>4个系统时钟周期。来自窗口比较器的INT中断信号由微控制器的内部定时器捕捉,能够最大限度地减少软件延迟。超声法探测液面系统电路如图2所示。
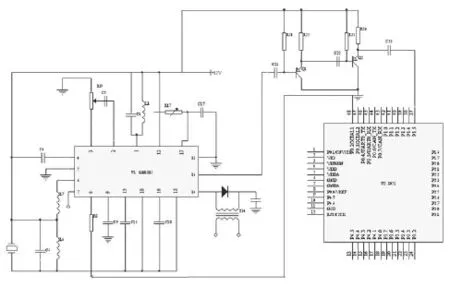
图2 超声法探测液面系统电路图
4 超声法液面探测系统的实现
(1)将LM1812芯片的第1脚外接L1、C1,由此决定电路发送的工作频率,其工作频率fo=1/2π。由微控制器发送中断控制LM1812芯片各引脚的状态,使第8脚为高电平,将L1、C1振荡槽路切换为振荡模式,振荡信号经驱动放大后,由13脚及6脚输出,并在6脚、13脚之间接变压器,以便与超声波发送器阻抗匹配。此时,LM1812芯片在微控制器的控制信号下向外发射超声波。
(2)超声波信号到达液体液面处,发生反射,通过将LM1812的8脚设置为低电平,使芯片处于接收模式,接收反射后的回波信号[11]。此时,超声波接收器接收到的超声波信号经电容耦合由4脚输入,再经内部两级放大后同由1脚的谐振回路取出的信号一起送到检测器。但由于此时噪声脉冲也同样被检测,所以要通过17脚外接R17、C17进行滤波。电阻R17和电容C17的时间常数为发送时间的10%~50%。再经过积分延时,16脚和14脚变成低电平。当1脚上的电压变的小到不能触发检测器时,积分器经延时后复位[12]。
(3)当LM1812处于发送模式时,第二级放大器自动断开;当切换回接收模式时,第二级放大器并不马上接通,而是在由9脚外接电容引起一段延时后再接通。这个延时使接收器暂时封闭(检测器同时封闭),为超声波发生器停止振荡提供了时间。9脚外接电容C9的大小与延时有关,第16脚提供与互补金属氧化物半导体(complementary metal-oxidesemiconductor,COMS)兼容的逻辑输出,14脚为集电极开路输出,14脚的吸收电流>1 A时,在多重回波接收情况下就可能使芯片损坏。11脚被设计成保护14脚功率输出端,其外接电容C11在14脚为低电平时(吸收电流)对内部电流进行积分。
(4)通过微控制器发送中断控制LM1812芯片各引脚的状态,从而进行超声波信号的发射与接收。利用对计时器的数据进行处理。本系统采用了复杂可编程逻辑器件(complex programable logic device,CPLD)脉冲计数的方法,间接测量时间是将超声波往返时间转化为对单片机内部计数脉冲的测量,即公式1[13]:
L=NS/2=Nv/(2f)(1)
式中S=v/f;f为单片机机器频率;其计算可获得当前液面情况。
(5)将接收到的回波信号通过二级放大模块进行信号放大后送往微控制器进行数据处理,并可获得当前液面情况,以达到液面探测的目的[14]。
5 结语
本研究探讨了超声法在全自动酶免工作站中的液面探测系统中的应用,这种液面探测方法针对当前全自动酶免工作站的现状,克服了其加样针必须向下移动一次方可得知液面情况,对导电性能差的液体无效等几大缺陷,提出了超声法液面探测系统,能够在克服上述缺点的基础上,提高移液精度,同时更大程度的避免交叉污染,从而更好的满足全自动酶免工作站的检验要求[15]。
[1]李文胜,周伟,柳晓琴,等.全自动酶免仪与半自动酶标仪比对研究[J].中外医疗,2011,30(24):19,21.
[2]朱美芹,王莉莉.全自动酶联免疫检测仪与手工酶联免疫检测的比对评价[J].检验医学与临床,2014,11(1):21-22.
[3]徐建超,李冰丽.超声波液位探测仪[J].中小企业管理与科技,2012(11):305-306.
[4]Peng li,Sai Chen,YuLei Cai,et al.Accurate TOF Measurement of Ultrasonic Signal Echo from Liquid Level Based on A 2-D Image Processing Method[J].Neurocomputing,2015,175:47-54.
[5]Iryo H,Shimazaki Y.Liquid level detection device and method of manufacturing the same:US,US20150247752[P].2015-09-03.
[6]侯建军.基于LM1812的超声波测距系统设计[C].厦门:四川省电子学会传感技术第十届学术年会,2007.
[7]伦翠芬,张海峰,陈立东.基于超声波和组态王的油罐液位远程监测系统的设计[J].河北科技师范学院学报,2014,28(1):33-37.
[8]Long L,Yi B,Xie H.The Design of Ultrasonic Liquid Level Detection System Based on ARM[C].International Conference on Civil,2015.
[9]李彩红,杨志伟.基于CPLD和单片机的高速数据采集系统设计[J].仪表技术,2013(7):35-37.
[10]Mazidi,Muhammad Ali,Mazidi,et al.The 8051 Microcontroller and Embedded Systems[M]. Prentice Hall,2015.
[11]LU Ke,XD Zhang,MA Hong-Xu.Design of Ultrasonic Liquid Level Control System Based on MCU[J].Mechanical and Electrical Engineering Technology,2014.
[12]Puskas PJ,Myers SH.Liquid condition sensing circuit and method:US,US8973601[P].2015-03-10.
[13]Birtcher CM,Steidl TA.Ultrasonic liquid level sensing systems:US,US8959998[P].2015-02-24.
[14]Upchurch BL,Lingle JF.Duty cycle based liquid level detection system for a driveline co mponent:US,US20140320278[P].2014-10-30.
[15]Durkee SR.Processing echoes in ultrasonic liquid gauging systems:US,US5856953[P].1999-01-05.
The design of liquid level detection system by ultrasonic method on automatic enzyme immunoassay system
GAN Yi-wu, XIE Qing-hua, GUO Xuan-cheng
China Medical Equipment,2016,13(9):13-15.
Objective: To design the liquid level detection system by ultrasonic method to meet the requirements of automatic enzyme immunoassay workstations and have a precise detection of liquid level. Methods: Because the existing sample needle should move down, liquid surface and the poor conductivity of liquid were invalid. So a method of ultrasonic liquid level detection system was designed. The control signal was launched by a microprocessor to control ultrasonic signal generator chip and the ultrasonic signal reflected when the liquid level in a test tube or microplate. Results: By receiving the reflection echo signal sent to the microprocessor for signal processing, the liquid level was detected. Conclusion: The ultrasonic method applied to the liquid level detection system to overcome the above shortcomings, improve pipetting accuracy and avoid cross pollution, so as to meet the requirement of the automatic enzyme immunoassay workstation test.
Automatic enzyme immunoassay analyzer; Liquid level detection; Ultrasound; LM1812 chip
1672-8270(2016)09-0013-03
R197.324
A
10.3969/J.ISSN.1672-8270.2016.09.004
2016-05-10
甘宜梧,男,(1976- ),本科学历,工程师。山东博科生物产业有限公司董事长,从事公司产品设计开发和运营管理工作。