基于磁流变液的飞机起落架嵌入式缓冲控制器设计*
2016-10-18傅莉李彬彬胡为陈新禹
傅莉,李彬彬,胡为,陈新禹
(1.沈阳航空航天大学航空航天工程学部,沈阳110136;2.沈阳航空航天大学自动化学院,沈阳110136)
基于磁流变液的飞机起落架嵌入式缓冲控制器设计*
傅莉1,李彬彬2,胡为1,陈新禹2
(1.沈阳航空航天大学航空航天工程学部,沈阳110136;2.沈阳航空航天大学自动化学院,沈阳110136)
基于飞机着陆和滑行过程中,飞机起落架中磁流变阻尼器的阻尼力的不可控的问题。提出基于磁流变液的飞机起落架嵌入式缓冲控制器设计方法,设计了针对控制磁流变阻尼器阻尼力的缓冲控制系统,主要包括嵌入式数字信号处理器DSP的选择,控制系统的原理设计,电源产生电路和复位电路模块,JTAG仿真电路模块,A/D采样校正模块,D/A转换模块,压控电流源驱动模块。通过电路模块的仿真,由控制系统中压控电流源出来的电流在阻尼器接受范围之内,证明了设计的磁流变缓冲控制器能对阻尼力的大小进行控制,对飞机起落架的缓冲系统起到调节作用。
飞机起落架,阻尼力,嵌入式,缓冲控制器,数字信号处理器
0 引言
飞机在着陆撞击和不平坦的跑道上高速滑跑时会产生较大载荷。为了有效避免载荷过大,飞机起落架一般都有缓冲系统。现代飞机起落架大部分采用油气式缓冲器,如双气腔式、单气腔式等缓冲器,此处选用磁流变阻尼器最为起落架的缓冲装置。磁流变阻尼器由于其具有性能优良、反应迅速和能耗低、阻尼调节范围大等特点,为缓冲装置的实现提供了可能[1-2]。磁流变阻尼器是以磁流变液为工作介质的阻尼器,利用磁流变液的流变特性,通过改变磁流变液周围的磁场强度来控制阻尼力的大小。磁流变阻尼器可以有效地克服油气式阻尼器阻尼不可调的缺点,有效改善起落架着陆缓冲性能[3]。Carlson JD[4]提出了一种用于陆地运输的汽车磁流变阻尼器悬架系统;Gordaninejad F[5]开发出高速运行汽车多功能可控半主动磁流变阻尼器。针对磁流变阻尼器在汽车悬架上的应用,把磁流变阻尼器应用到飞机起落架上并通过DSP处理器进行控制,基于磁流变阻尼的缓冲器在飞行器着陆程中受到的冲击载荷更小,而且需要的行程空间更小[6]。
与微控制器(MCU)和微处理器(ARM)相比,强大的数据处理能力和高速的运行速度是DSP处理器最突出的两大特色,并且DSP处理器还具有可编程性,它的实时运行速度每秒能够达到数以千万条复杂的指令程序,远远超过通用微处理器[7]。
飞机起落架缓冲控制系统采用的是TI公司的TMS320F28XX系列。TMS320F28XX具有强大的数字信号处理能力、时间管理能力和嵌入式控制功能,因此,被广泛应用于工业控制,如工业自动化控制、电力电子技术应用、智能仪器仪表、电机伺服控制系统等。
1 飞机起落架嵌入式缓冲控制系统原理
本文把磁流变液用到飞机起落架上,以磁流变缓冲系统作为飞机起落架的缓冲装置,设计出一种以DSP处理器为核心的硬件电路控制系统,设计的性能和可行性都能达到要求[8]。在飞机着陆过程中,位移传感器采集到机体运动的相对位移信号和压力传感器采集到的压力信号传给DSP控制器,经过信息处理后把相应的控制信号传给磁流变阻尼器,从而控制磁流变阻尼器阻尼力的大小。
本次设计的主要研究内容是将DSP处理器用到飞机起落的磁流变阻尼器控制系统中,有效控制磁流变阻尼器的阻尼力的大小,主要设计原理如图1所示。

图1 飞机起落架磁流变阻尼器嵌入式控制系统原理框图
原理框图中所用的嵌入式DSP处理器为TI公司的TMS320F28XX系列,由检测机构(位移和信号传感器)提出的位移信号和压力信号通过模拟输入通道给DSP中的A/D采样校正电路进行采样校正,由DSP进行控制算法和程序的实现,信号通过DSP进行处理后转换为一系列的数字信号,这些数字信号通过DSP的I/O端口传给外部设备D/A转换器,转换成电压信号,再将D/A转换器输出的电压信号给压控电流源驱动电路,最后由压控电流源输出电流信号给磁流变阻尼器,从而控制磁流变阻尼器的阻尼力。JTAG电路用来下载程序、仿真测试,复位电路可以用来对控制系统进行复位,外扩RAM电路是存储数据的高速缓存,晶振电路是保护程序且让控制程序顺利运行的保障。
2 飞机起落架嵌入式缓冲控制硬件电路系统设计
2.1JTAG仿真电路模块
在设计JTAG仿真电路模块时,考虑到JTAG电路的抗干扰性,在与DSP相连接的端口均需要采用上拉设计。上拉设计就是在设计过程中将不确定的信号通过一个电阻嵌位在高电平,电阻同时起限流作用。JTAG电路如图2所示。

图2 JTAG电路
2.2电源产生电路和复位电路模块
TMS320F2812工作时所要求的电压分为两部分:3.3 V的Flash电压和1.8 V的内核电压。TMS320F2812对电源很敏感,所以本控制系统所使用的是电压精度比较高的电源芯片SPX1117。电源产生电路如图3所示。

图3 电源产生复位电路
电源插孔JACK1标识为内正外负,+5 V稳压源的开关。SPX1117-3.3电源转换芯片(U1)作为5 V转3.3 V的高性能稳压芯片,为整个控制系统提供稳定可靠的主电源VCC(3.3 V)。SPX1117-3.3电源转换芯片(U2)提供的3.3 VA是提供给AD使用的。SPX1117-1.8电源转换芯片(U3)提供1.8 V给DSP内核使用。SPX1117输出后的47 uF的电容不能省略,这样能更好地保证电源质量。
SPX1117系列LDO芯片输出电流最高可达800mA(注意后缀),输出电压的精度在±1%以内,还具有电流限制和热保护功能,并且价格低廉,广泛应用于手持仪表,数字家电和工业控制领域。使用时,输出端通常接一个10 uF或者47 uF的电容来改善瞬态响应和稳定性。
使用专门复位芯片SP708R,保证DSP芯片可靠复位,并提供手工复位按钮,方便调试。本控制系统中只采用了SP708R的7脚(/RST)对DSP进行复位。
2.3控制系统A/D采样校正模块
TMS320F2812中内置有16通道、12位的模数转换器(ADC)。A/D转换电路如图4所示。

图4 A/D转换电路
本控制系统A/D采样校正模块中A/D转换电路与芯片LM358共同组成放大电路,位移传感器和压力传感器输出的电压在0V~5 V之间,上位移信号、下位移信号、压力信号通过ADCINA1'、ADCINA2'、ADCINA3'插针引到LM358运放进行电压调理,为了保证模拟信号能在TMS320F2812可接受的电压范围内,且防止外部干扰,本模块还设计了钳位保护电路,以保证输入到TMS320F2812芯片的信号在0 V~3.3 V之间,如图中DQ1、DQ2为两个二极管,当经过LM358放大电路出来的电压信号略高于3.3 V时DQ2二极管被导通,输入到A/D端口电压直接为3.3 V,同理,当经过LM358放大电路出来的电压信号略低于3.3 V时DQ1二极管被导通,输入到A/D端口电压直接为0 V。这样就通过这两个二极管将ADC端口输入电压保持在其允许的范围内,使其正常工作。
2.4控制系统数模D/A转换模块
当控制系统对传感器提取的模拟信号由A/D转换器将模拟信号变成数字信号,再经过控制算法的分析运算,为了实时控制系统的能产生相应的电流信号,所以必须再将分析后的数字信号转换成模拟信号,此时可以由SPI实现D/A转换。SPI是一个高速同步的串行输入/输出口,通常称为串行外设接口,SPI的通信速率和通信数据长度都可编程。SPI实现D/A转换功能所选用的D/A转换器为TI公司的TLC5620串行4通道8位D/A转换器。DSP芯片TMS320F2812通过SPI口与TLC5620相连接。数模转换器电路图如5所示。

图5 D/A转换器电路图
本控制系统中D/A转换器的4路D/A信号均经过电压跟随器输出,由于TLC5620的控制信号要求的VIH(输入高电平)较高[9],所以需要将DSP输出的SPICLK、SPISIMO以及I/O口模拟的CS信号的电平提高。
2.5压控电流源驱动模块

图6 压控电流源驱动模块
此驱动电路采用3个运算放大器型号为OP07CP,所用的场效应管型号为IRF640,V1为可变电压,R8为采样电阻,这个电阻是可变的,运算放大器0P07采用双电源供电,图中P2为它的供电源,其中+12V是场效应管IRF640的供电电源。由于D/A芯片TLV5620的最大输出电压为3.2 V,所以此电压可调范围为0 V~3.2 V,由D/A电压转化器输出得到。设经过第1个运算放大器和第2个运算放大器后所得到的电压为U2,输入电压为最大值3.2 V时,可得出等式:20 KΩ千欧/10 KΩ=3.2 V/U2,得出U2=1.6 V,此时Id=U2/R8=1.6 V/0.8Ω=2 A。因此,当输入电压在0V~3.2V时可以使场效应管漏极所产生的电流在0A~2A范围之间,此电流直接给磁流变阻尼器,从而控制磁流变阻尼器阻尼力的大小,图中的Relay1为接磁流变阻尼器的接线端子。
3 电路模块控制仿真验证
压控电流源驱动电路采用Multisim模拟仿真得到的结果如图7所示,其中仿真软件给的电压V1即D/A的输出电压,D/A的输出电压与压控电流源驱动电路处理后所得到的输出电流是成线性变化的。D/A输出电压为3.2 V,运放U2的输出电压为1.6 V(XMM2显示的电压),从场效应管输出的电流为2 A(XMM1显示的电流),场效应管出来的电流即为磁流变阻尼器的输入电流,此电流为控制磁流变阻尼器的最大电流。
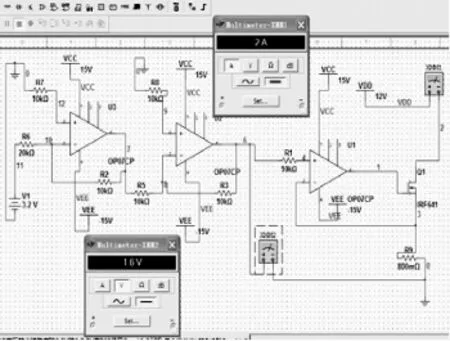
图7 压控电流源驱动电路仿真图
A/D信号采样电路仿真图如图8所示,A/D采样进入处理器的电压是3.003 V(XMM1显示的电压)。由于本控制系统采用的传感器输入电压范围在0 V~5 V,而TMS320F2812所能承受的最大电压为3.3 V,所以在传感器采集的信号输入到TMS320F2812中的电压信号必须通过信号调理,使输入信号在DSP所能承受的电压范围之内,此信号采样电路可以将信号控制到DSP所能接受的范围,而且还能将处理后的信号与处理前的信号成线性关系变化。
4 结论
本文设计了一种基于磁流变阻尼器的飞机起落架嵌入式控制系统,该系统以TI公司的一款高性能、多功能、高性价比的32位定点DSP处理器F2812为核心,将磁流变技术应用于起落架缓冲器上,针对某型号飞机起落架缓冲控制系统提出其缓冲控制方案,以及外围扩展电路等的设计。通过模块电路的仿真,能够实现对磁流变阻尼器的阻尼力的大小进行控制,从而对飞机起落架的缓冲系统起到调节作用,设计达到了期望的效果。

图8 A/D采样电路仿真图
[1]YANG G S.Large-scale MR fluidsDampers:modeling and dynamic performance consideration[M].OXford:Engineering Structures,2004.
[2]PAN GY,HIROSHIM,YOSHIHISH H.Analyticalmodelof amagneto rheological damper and its application to the vibration control[C]//PROCOf System Integrity and Maintenance,Kyoto,2000,1850-1855.
[3]姜哲珠.基于磁流变减震器的轻型起落架设计及其减震特性研究[D].哈尔滨:哈尔滨工业大学,2012.
[4]CARLSON J D.Commercial magneto-rheological fluid devices[C]//Proceeding of the 5th internationalConference on ER Fluids,MR Suspensions and Associated Technology,1995:20-28.
[5]GORDANINEJAD F,KELSO S P.Magnet-rheological fluid shock absorbers for HMMWV[C]//Proceedings of SPIE,2000:266-273,506.
[6]BATTERBEE D C,SIM N D,STANWAY R,et al.Magnetorheological landinggear:I.a designmethodology[J].Smart Materialsand Structures,2007,16(6):2429-2440.
[7]MEYER B U.Digital signal processing with field programmable Gate Array[J].Springer,2001,33(8):53-59.
[8]CETIN S,ZERGEROGLU E,SIVRIOGLU S,et al.A new semiactive nonlinear adaptive controller for structures using MR damper:Design and experimental validation[J].Nonlinear Dynamics2011,66(4):731-743.
[9]康华光,陈大钦,张林,等.模拟电子技术基础[M].5版.北京:高等教育出版社,2008.
Aircraft Landing Gear Embedded Buffer Controller Design Based on M agneto-rheological Fluid
FU Li1,LIBin-bin2,HUWei1,CHENXin-yu2
(1.School of Aerospace Engineering,Shenyang Aerospace University,Shenyang 110136,China;2.School of Automation,Shenyang Aerospace University,Shenyang 110136,China)
Based on problem that themagneto rheological damper damping force of aircraft landing gear is not controllable in the process of aircraft landing and taxiing.A method of embedded buffer controller of aircraft landing gear based on magneto rheological fluid is presented and buffer control system is designed to control themagneto rheological damper damping force,whichmainly includes the selection of embedded digital signal processor(DSP)and the principle design of control system,power generation and reset circuitmodules,JTAG emulation circuitmodule,A/D sampling correction module,D/A converter module,voltage controlled current source driver module.Through the simulation of circuit module,the current in the magneto rheological buffer controller is accepted by the control system,the magneto rheological buffer controller designed can control damping force and play a regulatory role in the aircraft landing gear.
aircraft landing gear,damping force,embedded,buffer controller,digital signal processor(DSP)
V226
A
1002-0640(2016)09-0128-04
2015-07-05
2015-08-07
国家自然科学基金(61074090);中航创新基金(cxy2013SH 16);辽宁省自然科学基金联合资助项目(2015020061)作者简介:傅莉(1968-),女,辽宁沈阳人,博士,教授。研究方向:模式识别与智能系统。