基于PMAC运动控制器的3-UPU并联机构数控系统的实现
2016-10-15魏永庚李春艳
李 广,魏永庚,李春艳
(黑龙江大学 机电工程学院,哈尔滨 150080)
基于PMAC运动控制器的3-UPU并联机构数控系统的实现
李广,魏永庚*,李春艳
(黑龙江大学 机电工程学院,哈尔滨 150080)
以3-UPU并联机构机械本体为控制对象,利用齐次坐标变换进行该机构的运动学分析。推导了正逆解公式。开发了以IPC+PMAC运动控制器为核心的主从开放式数控系统框架,并以此为基础设计了数控硬件系统,绘制了电气接线图与接线表。搭建了该数控系统软件界面,完成了上位机程序和下位机程序的编写。最后以典型运动轨迹为例,验证数控系统的可行性。
3-UPU并联机构;数控系统;正逆解;PMAC运动控制器
并联机构又称并联运动学机构或虚拟轴机构,最为人熟知的是1965年由德国人Stewart首次提出的Stewart机构,该机构由6个液压缸支撑和驱动,用于对飞机进行飞行模拟,机构可以获得6自由度的位置和姿态[1]。我国第一台并联机器人实验样机由燕山大学于1991年研制成功,其后中科院、清华大学、哈尔滨工业大学、天津大学都研制了各种用途的并联机器人,许多研究成果达到了国际先进水平[2]。并联机构是区别于传统串联机构的一种新型机构,由于传统串联机构组成环节多,机构复杂,存在悬臂部分造成机构笨重,很难获得高的加工速度和精度[3],而并联机构通过两条或两条以上独立支链以闭环方式连接定平台和动平台,使得这种机构刚度重量比大,响应速度快,无误差积累,解决了串联机构存在的问题,越来越受到工程界的广泛重视[4-5]。
数控系统是并联机构系统的核心,其性能的好坏直接决定机构运行的可靠性和运行精度。传统数控系统是封闭式数控系统,即控制器由专门的生产厂家提供,不同的生产厂家提供的控制器拥有不同编程语言和操作系统,这种系统的集成能力差,功能相同的两个模块由于其生产厂家的不同而不能通用,系统的维护和升级必须依赖生产厂家,一些新兴的计算机技术不能在封闭式数控系统中得到很好的应用,用户也很难定制符合自身生产需求的数控系统。在一些加工需求多样的控制场合,封闭式数控系统不能满足现代设备个性化生产的需求。目前,关于并联机构数控系统的研究有很多,但大多数研究都选取并联机构数控系统中的某一模块进行重点研究,缺乏对完整数控系统的分析。基于PC机的开放式数控系统既克服了传统NC系统开放性差,不易进行模块化设计的缺点,又充分利用了PC机兼容大量CAD软件以及其庞大的网络资源,成为现在使用最为广泛的数控系统[6]。
1 运动学分析
并联机构由于独特的结构,使其坐标空间和关节空间存在非线性映射关系,也造成其运动学逆解求解简单,运动学正解求解复杂。求解并联机构运动学逆解方法有多种,如向量法、欧拉角法,但这些方法都存在一定的弊端,如向量法描述动平台位置的变化,却不能体现其姿态的变化[7]。欧拉角法需要将位置与姿势分开来描述其动平台位姿。本文使用齐次坐标变换的方法将动平台位姿通过齐次矩阵一次性转化到定坐标系中[8]。3-UPU并联机构结构简图见图1。
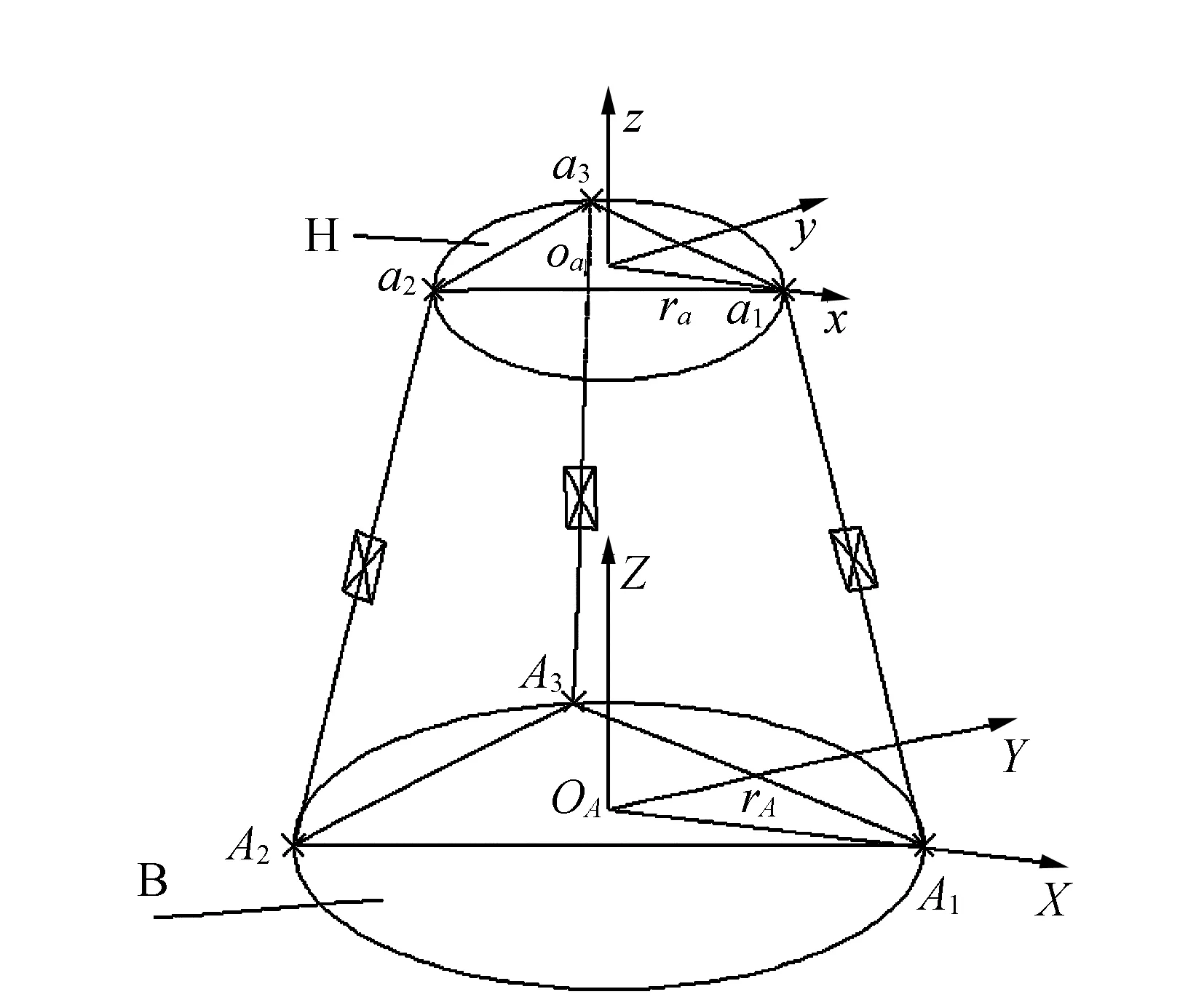
图1 3-UPU并联机构简图Fig.1 3-UPU parallel mechanism diagram
3-UPU并联机构动平台和定平台都为等边三角形,在动平台所处平面H建立笛卡尔坐标系Oa-xyz,选取等边三角形外接圆圆心Oa为原点坐标,等边三角形三顶点a1,a2,a3为虎克铰安装位置,外接圆半径为ra,在定平台所处平面B建立笛卡尔坐标系OA-XYZ,选取等边三角形外接圆圆心OA为原点坐标,等边三角形三顶点A1,A2,A3为虎克铰安装位置,外接圆半径为rA。
动平台各顶点在动坐标系中的坐标可表示为:
(1)
定平台各顶点在定坐标系中的坐标可表示为:
(2)
为了在定坐标系中表示动平台各顶点坐标,需要引入齐次矩阵,其一般表示为:
(3)

3-UPU并联机构动平台实现空间内3个方向的平移,其旋转角度为0°,故将sinθ=0,cosθ=1代入式(3)中,得到3-UPU并联机构旋转矩阵为:

(4)
利用齐次矩阵代入式(5)可求得定平台各顶点坐标在定坐标系中的表示如式(6)所示:
(5)
(6)
在已知动平台中心点坐标时,利用空间内两点间距离公式可求得连接杆件的长度即运动学逆解方程:
(7)
对式(7)进行代数运算可求得其运动学正解方程:
(8)

以上利用齐次坐标变换方法对3-UPU并联机构进行运动学分析,求取了机构的运动学正逆解,为数控系统设计提供了理论依据。
2 硬件系统搭建
本文采用基于PC+NC的开放式数控系统设计理念[9],利用研华610L作为上位机实现控制任务,如运动轨迹生成、伺服轴状态监测、数控任务管理、人机交互界面的编写,使用泰道公司生产的Turbo PMAC Clipper 运动控制器作为下位机,实现伺服指令的产生、插补轨迹生成、PLC顺序控制任务的实现,伺服系统采用松下A5系列伺服驱动器与伺服电机,数控系统硬件结构见图2。

图2 数控系统硬件结构Fig.2 Hardware structure of CNC system
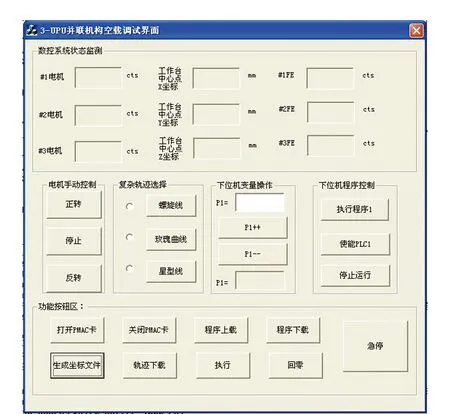
图3 人机交互界面Fig.3 Human computer interaction interface
3 软件系统实现
3-UPU并联机构数控系统软件功能分为两部分:上位机使用VC++编写上位机人机交互界面,实现伺服系统数据采集与显示,典型运动轨迹的生成,下位机运动程序及PLC程序的执行的控制和功能按钮区功能,其中典型运动轨迹生成模块使用VC++与MATLAB混合编程方法实现,上位机通过在VC++中调用PCOMM32动态链接库与下位机进行通信。下位机利用PMAC Executive Pro2 Suite软件包中的Pewin Pro32组件编写运动程序,运动学程序和PLC程序。
上位机人机交互界面见图3,采用模块化设计理念开发,其中包括数控系统状态监测模块、电机手动控制模块、复杂轨迹选择模块、下位机变量操作模块、下位机程序控制模块和功能按钮区模块6部分。
下位机运动学正逆解程序编写是利用PMAC所支持的编程语法,将运动学正反解写入下位机中,在运动程序执行阶段,当给定动平台中心点运动轨迹后,首先通过运动学反解求得连杆长度的变化量,进而计算出电机所需脉冲个数,控制电机运转,之后运行运动学正解方程判断动平台中心点是否运动到指定位置。下位机PLC程序功能可以实现数控系统的初始化和运动程度的顺序执行。
4 系统性能测试
数控系统安装与调试主要任务包括数控硬件系统的安装和参数配置,以及数控软件的调试。
数控系统参数配置主要是为运动控制器和驱动器配置合适参数以满足控制系统主要的需求。运动控制器参数配置是对其全局变量的配置,包括运动控制器工作模式选择、伺服门阵列频率设定、上下位机通信参数配置。驱动器参数配置是包括控制参数选择、指令脉冲输入输出方式的确定、编码器分辨率的确定等。
数控系统软件调试是在上位机人机交互界面中,通过设置典型运动轨迹合适参数,在上位机中将运动轨迹离散化,并将离散点以文本文件格式下载到下位机中执行然后在下位机中进行数据采集,典型轨迹运行结果见图4。由图4可见,并联机构动平台确实按照设置轨迹完成相应运动,证明了系统可行性。
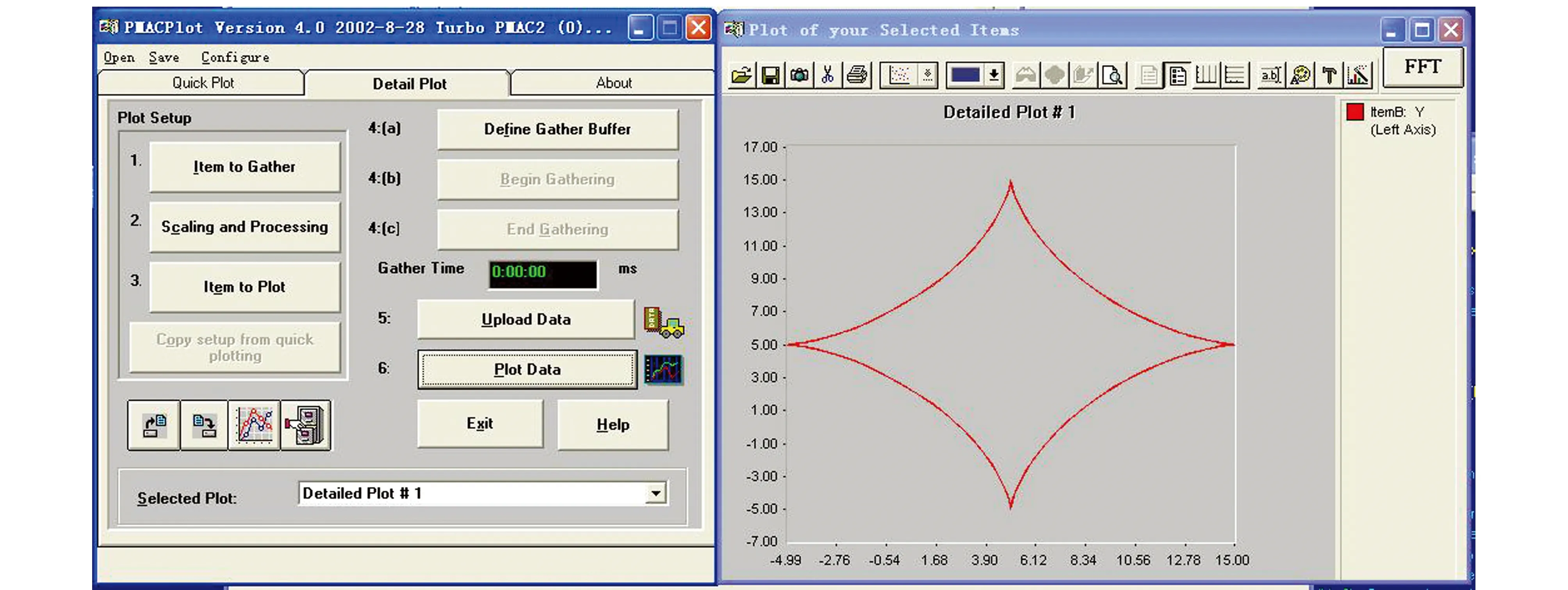
图4 典型轨迹运行结果Fig.4 Typical track operation result
5 结 论
本文以3-UPU并联机构为控制对象设计了数控系统,系统地阐述了数控系统开发的流程,通过对并联机构运动学分析,推导了其运动学正逆解方程。硬件系统搭建部分完成了设备选型,操作台设计和设备集成。软件系统开发了上位机人机交互界面、运动学程序和运动学正逆解程序等。系统安装调试部分将各模块安装在操作台前后面板上,配置了数控系统参数,以典型运动轨迹为例验证了系统的可行性。
[1]李强,闫洪波,杨建鸣. 虚拟轴并联机床研究的发展、关键技术及趋势[J]. 组合机床与自动化加工技术, 2006(8):41-43.
[2]Thomas Heyden, Christoph Woernle.Dynamics and flatness-based control of a kinematically undetermined cable suspension manipulator[J]. Multibody System Dynamics, 2006(2):75-78.
[3]黄真. 并联机器人机构学基础理论的研究[J]. 机器人技术与应用, 2001(6):11-14.
[4]高洪,赵韩. 并联机器人机构学理论研究综述[J]. 安徽工程科技学院学报:自然科学版, 2006(1)21:73-77.
[5]范宇超,李强,魏永庚,等.基于Adams的3自由度并联机构运动学分析[J].黑龙江大学工程学报,2013,4(2):108-112.
[6]韩博,许允斗,姚建涛,等. 2PRC-PRS并联平台运动学分析与控制系统开发[J]. 农业工程学报, 2016,32(14):30-38.
[7]蒲志新,李晓春,由旭平,等. 3-UPU并联机构运动学及工作空间研究[J]. 机械传动, 2016(1):12-14.
[8]Jaime Gallardo,Raúl Lesso,José M. Rico,et al. The kinematics of modular spatial hyper-redundant manipulators formed from RPS-type limbs[J]. Robotics and Autonomous Systems, 2011,59(1):12-21.
[9]陈志育,秦现生,任松涛. 基于PC+NC结构的数控系统的研究与开发[J]. 组合机床与自动化加工技术,2007(4):56-61.
(本期责任编辑:张松波王红星邹晓艳英文审校:丁琳)
Implementation of 3-UPU parallel mechanism numerical control system based on PMAC motion controller
LI Guang,WEI Yong-Geng*,LI Chun-Yan
(SchoolofMechanicalElectricalEngineering,HeilongjiangUniversity,Harbin150080,China)
Structure of 3-UPU parallel mechanism is analyzed and method of homogeneous coordinate transformation is used to establish the kinematics model. Positive and inverse solutions are derived. The framework of master-slave open CNC system which is used IPC + PMAC motion controller as a core is developed. The CNC hardware system is designed and electrical wiring diagram and wiring diagram is finished. The host computer program and the lower computer program are written. Finally, taking the typical trajectory as an example, feasibility of the CNC system is verified.
3-UPU parallel mechanism;CNC;positive and inverse solutions; PMAC motion controller
10.13524/j.2095-008x.2016.03.048
2016-07-04;
2016-07-21
国家自然科学基金资助项目(51307045)
李广(1991-),男,山西太原人,硕士研究生,研究方向:并联机构数控系统,E-mail:lgdyx072@163.com;*通讯作者:魏永庚(1972-),男,吉林洮南人,教授,硕士研究生导师,研究方向:并联机构、数控系统、检测技术等,E-mail:wyg_1972@163.com。
TP273;TP241
A
2095-008X(2016)03-0092-05
