污水处理厂提升泵站稳流节能优化控制系统
2016-10-15彭小玉宋翼颉
彭小玉,秦 斌 ,王 欣,宋翼颉
(湖南工业大学 电气与信息工程学院,湖南 株洲 412007)
污水处理厂提升泵站稳流节能优化控制系统
彭小玉,秦斌 ,王欣,宋翼颉
(湖南工业大学 电气与信息工程学院,湖南 株洲 412007)
针对污水处理厂提升泵站普遍存在水泵机组启停频繁、集水井易发生溢流事故、泵站单元高能耗的问题,设计一种基于变参数PID控制算法和泵站分组轮询的提升泵优化控制系统,并运用于株洲市某污水处理厂。实际运行结果表明:该系统可以适应进水水量的变化,在减少水泵的启停次数,防止集水井溢流,降低系统能耗,保证安全生产方面取得了良好的效果。
污水处理;提升泵;优化控制;节能降耗
1 研究背景
随着我国经济的发展和城镇化的推进,对城市污水处理的需求日益增加。当前,我国虽然在城市污水处理厂的建设方面取得了较大进展,但大部分污水处理厂都存在自动化水平低、轻视过程管理、能耗物耗高等问题。优化污水处理厂自动控制及运营管理,降低污水处理厂运行成本,增强工艺稳定性,是目前污水处理行业适应经济发展的关键[1]。
提高城市污水处理厂的自动化控制水平,不仅要改善设备的自动化程度,还要优化工艺流程各个单元的控制方法,尤其是高能耗单元,例如占全厂耗电量20%~30%的污水提升泵站[2]。
污水处理工艺流程如图1所示。原污水经过粗格栅间去除污水中体积较大的悬浮状固体物质,然后进入细格栅及旋流沉砂池,去除大部分的悬浮物和部分有机物,从而提高污水的净化效果。经过旋流沉砂池的出水进入氧化沟,在氧化沟内微生物的作用下分解大部分有机物、氮和磷。随后污水流入二沉池絮凝沉淀,上层澄清液进入提升泵房,下层污泥排入污泥回流泵房。污泥回流泵房的部分污泥回流至氧化沟,剩余污泥则浓缩脱水外运。 提升泵房集水井出水至活性砂滤池,同时在集水井出水口加药除磷;砂滤池出水后经加氯消毒池深度处理,最后出水。从城市污水处理工艺流程可以看出,提升泵站位于二沉池和砂滤池之间,是为后续工艺提供水流动力的重要单元 。

图1 城市污水处理工艺流程Fig. 1 Technological process of urban sewage treatment
目前,我国污水处理厂提升泵站单元主要根据人工经验实行本地控制或PLC自动控制。本地控制即由操作人员通过计算泵站集水井实际液位与目标液位偏差,根据经验人为控制各台泵的启停或变频泵的给定频率。PLC自动控制即通过液位计反馈的实际液位值与PLC预设的标记值比较,控制泵的启停或根据经验给变频器固定的频率输出,同时使用轮询机制,尽量使每台泵的运行时间基本相同。
目前常用的控制方式的不足之处是:控制策略与人的经验密切相关,在来水量变化频繁,集水井容量较小,污水处理厂要求24 h连续生产的情况下,容易造成因水泵频繁启停导致电机过热而烧毁;在雨天或是进水流量突然增加时,则容易造成集水井溢流,不能保证污水处理厂的安全生产。变频泵给定的是固定频率,不考虑集水井水位变化,从而造成大量的能源浪费。
为此,本文结合变参数PID控制算法和泵站编组轮询机制,设计一种泵站稳流节能优化控制系统,并在实际工程中检验该系统稳流节能的效果。
2 污水提升泵站优化控制系统方案
本研究设计的泵站稳流节能优化控制系统主要功能为:根据泵站当前水位、流量等参数优化泵机组合方式,减少泵机起停频率[3];通过使用变参数PID控制器控制变频泵频率,提高液位控制的稳定性;同时对泵组进行编组轮询控制,降低提升泵的磨损和综合能耗。
2.1提升泵液位变参数PID控制算法
工程中普遍使用的PID控制器由比例环节、积分环节、微分环节构成,各个环节对应的参数分别是Kp,Ki, Kd,其输入偏差e(t)与输出u(t)的关系可以描述为

在工程中控制器正式投入使用前,工程师都会按照工程和调试经验事先设定好控制参数。但实际应用过程往往具有非线性、时变不确定性,控制对象存在较大的惯性和强干扰特性,固定参数的PID控制器难以实现高质量的稳定控制。尤其当被控对象的参数变化超出实际范围时,系统性能会明显变差。为提高PID控制性能,学者们对自适应性能的PID控制器进行了深入研究。 例如,神经网络PID控制器,它是利用RBF(radial basis function)神经网络在线辨识对象模型,利用BP(back propagation)神经网络再根据辨识模型在线调整PID参数,其计算量很大,在实际运用中难以实现[4]。如果利用变参数PID控制,既可以较好地解决常规控制器对工况的适应性问题,又可以通过编写PLC程序得以实现。
提升泵液位变参数PID控制如图2所示。其中提升泵房的集水井液位为被控量,采用超声波液位计进行检测;PID控制器通过变频器控制轴流泵的转速,从而控制集水井液位,根据液位的偏差e计算PID参数。

图2 变参数PID控制方案原理图Fig. 2 Schematic diagram of variable parameter PID control scheme
图中K′p, K′i, K′d分别为经过变参数规则计算修正后的比例参数、积分参数和微分参数,各个参数与输入量偏差值e、偏差积分和偏差微分 之间的数学关系为:

式(2)~(4)中:Kp0, Ki0, Kd0为修正系数;
a为常数。
Kp0, Ki0, Kd0主要取决于当系统稳定时PID控制器的参数和在线调整参数的速度,取值范围在0和1之间;取a=-0.3,取Kp, Ki, Kd为使用常规PID控制时的整定值。在偏差e的绝对值较小(稳态值附近)时,比例系数K′p取较小值,相反时取较大值,这样有利于加快响应速度,同时保证有很好的稳定性[5]。在偏差e积分的绝对值较小(稳态值附近)时,积分系数K′i取较大值,相反时取较小值(或者0),这样既有利于保证稳态无静差,又不会引起积分饱和而使超调增大、调节时间延长。在偏差e微分的绝对值较小(稳态值附近)时,微分系数K′d取较大值,相反时取较小值,这样有利于加快对小偏差的反应速度,提高控制器对干扰的灵敏度,出现干扰时能及时调节[6-9]。
2.2泵站编组轮询方法
由于污水处理厂生产的连续性,要求确保提升泵站机组可以24 h不间断工作,因此在工程中均实行电机备用制度。即系统含有N台电机,一般情况下M(M≤N)台投入使用即可满足工艺要求,其余电机则作为备用泵。为避免泵组频繁启停或者单台泵长时间连续运行、长时间闲置,可采用编组轮询控制方法。
假设系统共有N台提升泵,x台变频泵,y台工频泵,并将其分为变频和工频2组,在某一液位段需要i台变频泵,j台工频泵运行。计算每台泵的累计运行时间和正在工作泵的连续运行时间,当液位达到泵的切换条件、正在工作的泵出现故障、设定的单台泵连续运行时间等条件时,将累计运行时间值从小到大对应的泵的编号按顺序自动置为1~i或1~j。系统根据液位情况,自动开启编号为1~i的变频泵和1~j的工频泵,控制单台变频泵启动的流程如图3所示。

图3 变频泵控制流程图Fig. 3 Flow chart of variable frequency pump control
3 污水提升泵站优化控制系统工程应用
将优化控制系统应用于湖南省株洲市某 A2O工艺污水处理厂二次提升泵站改造项目。该厂污水处理规模为 10万m3/d,泵站设有 4台轴流泵,单台额定功率为40 kW,其中2台泵配备45 kW的施耐德变频器。集水井内设有一台超声波液位计,量程为0~6.0 m,提升泵站的各类设备和仪表经通讯进入施耐德PLC 系统。改造前,提升泵采用人工控制,启停频繁,这不仅导致能量浪费、设备使用寿命缩短,而且在夜间人工值守时容易造成集水井溢流、出水波动大。
3.1工程实施
在该次自动控制改造过程中,将4台泵分成2组,一组为变频泵,另一组为工频泵。设置启1台泵、启2台泵、启3台泵、停1台泵、停2台泵、停3台泵、恒液位7个液位标记值,当实际液位到达液位标记时泵的动作如图4所示。进水流量在一定范围内波动时,使用变参数PID控制器调节变频泵频率实现恒液位控制。

图4 用液位标记位控制水泵启停示意图Fig. 4 Schematic of controlling pump on/off with the liquid level sign
每个泵均做连续运行时间和累计运行时间计算,比较同组泵的运行时间,达到泵的切换条件时,优先开启累计运行时间短的泵。如果系统长期稳定运行在恒液位控制段,则在到达轮询时间(可调)时切换成另一组泵,变频泵组的频率由变参数PID控制器根据液位偏差调节。使用与施耐德硬件配套的Unity Pro 软件对提升泵站的自动控制进行编程,图5为轮询控制的部分梯形图程序。
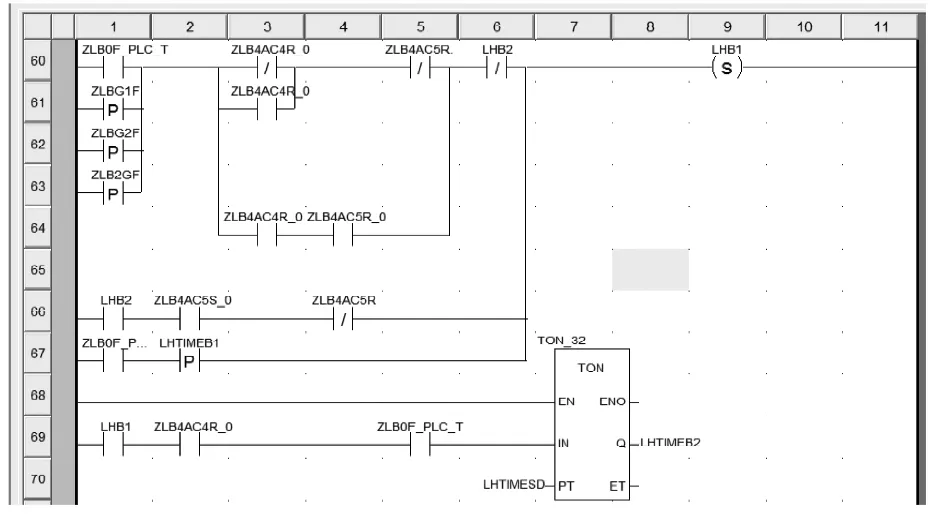
图5 轮询控制的部分程序Fig. 5 Part of the polling control program
在设计上位机界面组态程序时,着重考虑了系统的易操作性和安全性,界面生动友好,实现的主要功能如下。
1)在提升泵控制画面上,不仅可以看到各个设备的运转情况及所有参数,还可以在泵处于远程模式时实现上位机点动和PLC自动控制。
2)在画面上可以设置各个液位标记位和自动轮询时间等参数值,在上位机点动模式下还可调节变频器频率。
3)在曲线显示画面上,可以观察分析诸如各泵电流、集水井液位、变频器频率等模拟量的变化情况。
图6为提升泵房上位机可视化界面。

图6 提升泵房上位机界面Fig. 6 Lift pump station PC interface
3.2提升泵站运行结果分析
3.2.1集水井液位变化对比
泵站控制系统改造前、后的液位变化规律分别如图 7和图8所示。由图可知, 将控制策略切换为变参数PID控制后,液位大幅波动的现象得到明显改善。改造前集水井液位在1.5~6.0 m之间跳变, 改造后液位基本在设定的恒液位值附近保持稳定。这有效地解决了在夜间无人值守时出现液位过高溢流的问题,同时出水流量变化小,为后续化学除磷单元提供了较平稳的进水量。
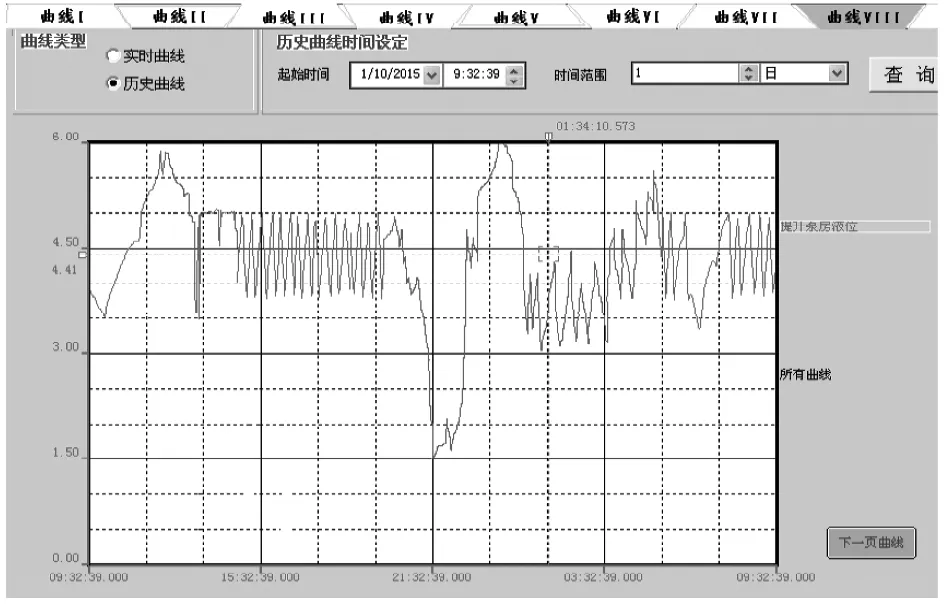
图7 人工控制方式液位24 h的变化规律Fig. 7 The change law of liquid level in manual control mode for 24 h
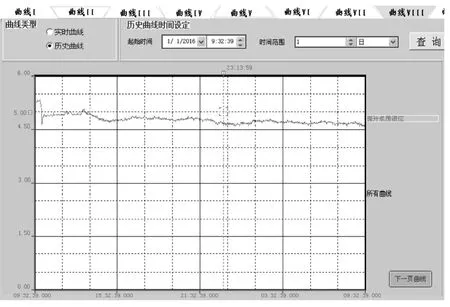
图8 PLC自动控制方式液位24 h的变化规律Fig. 8 The change law of liquid level in PLC automatic control mode for 24 h
3.2.2泵站节能分析
当泵负载时,其电机转速n与流量Q、扬程H及泵的轴功率P有如下关系:

式中:n1, n2分别为电机转速;
Q1, Q2分别为电机在转速为n1, n2时的流量;
H1, H2分别为电机在转速为n1, n2时的扬程;
P1, P2分别为电机在转速为n1, n2时的轴功率。
电机转速n与电源频率f以及电机旋转磁场的极对数p的关系为

式(5)和(6)表明:泵的流量与其转速成正比,泵的扬程与其转速的平方成正比,泵的轴功率与其转速的立方成正比,电机转速与电源频率成正比。
当水泵的工作效率一定,要求调节流量下降时,转速n可成比例地下降,而此时轴输出功率P成立方关系下降,即水泵电机的耗电功率与转速近似成立方比的关系[10]。 以单台提升泵电机功率为40 kW计算,当转速下降到原转速的80%时,其耗电量为20.48 kW,省电48.8%;当转速下降到原转速的50%时,理论上其耗电量为5 kW,省电 87.5%。因此在保证水位稳定且不出现空载的状态下,使用变频器可大量减少电能消耗。
泵站控制系统改造后,一方面集水井液位基本稳定在4.5~5.0 m之间,相对减小了吸水处水位与出水控制点水位的几何高差,降低了污水提升扬程;另一方面变参数PID控制器合理调节变频泵的频率,使其适应于流量与扬程的变化,减小了污水提升能耗。系统增加变频器后,提高了电能利用率,降低了无功损耗。改造后1个月与改造前1个月实际运行能耗对比如表 1所示。

表1 改造前后1个月泵站能耗对比Table 1 The energy consumption comparison of the pumping station for 1 months before and after the transformation
由表1计算可得,稳流节能优化控制系统实施后,单元能耗可节约22.8%,全厂节能 5.24%。
4 结语
针对现有提升泵站能耗高、出水不稳定、泵启停频繁的问题,设计了基于变参数PID控制算法和泵站编组轮询的泵站优化控制系统。该系统的编组轮询控制机制可使各个泵运行时间基本相同,能较好地延长泵的寿命。跟踪液位变化规律动态修正PID控制器参数,保证了液位控制的稳定性,保持集水井在较高液位下安全运行,从而减少水泵启停次数、降低提升能耗、节约运行费用。经工程实际应用证明,该系统稳流节能效果良好,具有一定的普适性,对于相关工程具有一定的参考意义。
[1]郭思元,王浩昌,赵冬泉,等. 基于稳流节能的污水处理厂进水泵站智能控制方法[J]. 中国给水排水,2010,26(20):135-138. GUO Siyuan,WANG Haochang,ZHAO Dongquan,et al. Intelligent Control Method of Influent Pumping Station of WWTP Based on Stable Flow Energy Saving[J]. China Water & Wastewater,2010,26(20):135-138.
[2]付红. 机械设备自动化在污水处理工程中的应用[J]. 中国科技信息,2014(16) :50-51. FU Hong. Application of Mechanical Equipment Automation in Sewage Treatment Engineering[J]. China Science and Technology Information,2014(16) :50-51.
[3]宗圆. 污水泵站系统的节能机理及控制策略[J]. 城市建设理论研究(电子版),2014(36). doi:10.3969/j.issn. 2095-2104.2014.36.1376. ZONG Yuan. Energy-Saving Mechanism and Control Strategy of Sewage Pumping Station System[J]. Urban Construction Theory Research(Electronic Edition),2014(36). doi:10.3969/j.issn.2095-2104.2014.36.1376.
[4]郑晋平. 基于RBF神经网络辨识的单神经元PID模型参考自适应控制[J]. 电子技术与软件工程,2015(19) :18-19. ZHENG Jinping. Single Neuron PID Model ReferenceAdaptive Control Based on RBF Neural Network Identification[J]. Electronic Technology & Software Engineering,2015(19) :18-19.
[5]李辉,杨超,赵斌,等. 风电机组电动变桨系统建模及运行特性评估与测试[J]. 电力系统自动化,2013,37(11) :20-25. LI Hui,YANG Chao,ZHAO Bin,et al. Modeling and Operation Performance Evaluation and Test of Electric Pitch System in Wind Turbine Generator System[J]. Automation of Electric Power Systems,2013,37(11) :20-25.
[6]尹媛. PID控制器参数整定方法研究[D]. 西安:西安理工大学,2014. YIN Yuan. The Research of PID Controller Parameter Tuning Methods[D]. Xi'an:Xi'an University of Technology,2014.
[7]赵敏. 智能自适应PID控制器设计及仿真研究[D]. 哈尔滨:哈尔滨工业大学,2012. ZHAO Min. Research on Design and Simulation of Intelligent Adaptive PID Controllers[D]. Harbin:Harbin Institute of Technology,2012.
[8]NABAVI-KERIZI S H,ABADI M,KABIR E. A PSOBased Weighting Method for Linear Combination of Neural Network[J]. Computers and Electrical Engineering,2010,36(5) :886-894.
[9]ZIEGLER J G,NICHOLS N B. Optimum Settings for Automatic Controllers[J]. Transactions ASME,1942,64(11):759-768.
[10]王文平. 浅析变频器在水泵控制中的应用[J]. 能源与节能,2014(4) :174-175. WANG Wenping. Analysis of Frequency Converter in Water Pump Control[J]. Energy and Energy Conservation,2014(4) :174-175.
(责任编辑:邓光辉)
An Optimal Stable Flow Energy Saving Control System of Lift Pumping Station in Sewage Treatment Plant
PENG Xiaoyu,QIN Bin,WANG Xin,SONG Yijie
(School of Electrical and Information Engineering,Hunan University of Technology,Zhuzhou Hunan 412007,China)
In order to solve the problems of start-stop frequently for lift pumps, overflow accidents for collection wells and high energy consumption for pump units, an optimal control system is proposed based on a variable-parameter PID control algorithm and lift pump station group polling and is applied to a sewage treatment plant of Zhuzhou. The actual operation results show that the control system adapts to the change of water inflow and achieves good effects in reducing the start-stop times, avoiding the overflow of collection wells, reducing the energy consumption and ensuring the production safety.
sewage treatment;lift pump;optimal control;energy saving
TP273
A
1673-9833(2016)02-0084-06
10.3969/j.issn.1673-9833.2016.02.016
2016-01-01
湖南省科技计划基金资助重点项目(2014FJ2018),湖南省自然科学基金资助项目(13JJ3110),湖南省教育厅科研基金资助重点项目(15A050),湖南省研究生科研创新基金资助项目(CX2015B564)
彭小玉(1991-),女,湖南湘乡人,湖南工业大学硕士生,主要研究方向为复杂工业过程建模与集成优化控制,E-mail:1248084903@qq.com
秦斌(1963-),男,湖南株洲人,湖南工业大学教授,博士,主要研究方向为复杂工业过程建模与控制以及智能调度,E-mail:qinbin99p@163.com
