履带式管道清洁机器人控制系统的设计与实现
2016-10-14肖卫初贺建权
彭 兴,肖卫初,贺建权,阳 霞,刘 颖,梁 健,刘 源
履带式管道清洁机器人控制系统的设计与实现
彭兴,肖卫初,贺建权,阳霞,刘颖,梁健,刘源
(湖南城市学院,湖南益阳 413002)
单片机内部集成2路PWM,8路高速10位A/D转换,产生PWM波和实现A/D转换,使外围电路更简单;采用TB6612FNG直流电机驱动模块、RT5350无线WiFi模块,并分别与单片机组成闭环反馈模式来进行电机控制以及信息传输,提高了系统工作效率。
机器人;履带式;单片机;无线模块
随着电子技术的发展,对于机器人应用的领域也越来越多。管道清洁机器人具备携带摄像机监控管道环境、机械手臂对管道进行除尘等功能,能有效解决部分通风管道的复杂环境清洁问题。
目前,国外的管道清洁机器人已形成产业化。如美国、丹麦、日本、韩国等诸多国家均有管道清洁机器人系列产品。我国对管道清洁机器人的研究起步比较晚,与国际先进水平尚有一定的差距,但在相关科研单位的极力支持下,使之得到了迅速的发展。[1]提出一种直进轮式微型管道机器人的行走系统,该系统采用轮式移动结构,但该运动系统仅仅适用于平坦的接触面,当遇到有一定坡度的斜面或者凸出地面的障碍物时,管道清洁机器人便不能继续进行下面的工作,基于这些不足,[2]提出一种六轮机器人爬楼梯能力的分析,从机器人对楼梯结构的适应能力,机器人运行过程的重心和爬楼梯过程中的最大俯仰角对机器人倾覆的影响等多影响因素考虑,得出机器人能够越障的参数。该文献成功解决了管道清洁机器人在管道内运行过程中的越障问题;文[3]提出了一种中央空调管道清洁机器人的设计,该机器人系统采用主控制箱与PC机连接,从而控制机器人运动。但受接线约束,机器人清理范围存在明显的局限性,基于这些不足,文[4]提出了一种利用ZigBee技术实现无线遥控的方法,该技术采用ISM频段中的2.5G频率,其衍射能力弱,穿墙能力也弱,并且价格相对昂贵,抗干扰能力差,如果采用915M、869M信道则容易受射频干扰;文[5]提出了一种利用红外线进行点对点通信的技术,它的主要优点是无需申请频率的优先权,但不足的是它是一种视距传输,两个通信设备之间必须对准,中间不能被其他物体阻碍,易丢失数据且传输速率较低;文[6]提出了在机器人上采用WiFi控制的方法,由机器人、支持WiFi的无线路由器和PC组成的硬件架构充分利用了家庭环境已经存在的PC、无线网络等硬件资源。WiFi无线网络技术具有集成电路简单、功耗低、成本低廉、实现容易、对人体危害小,抗信号衰减能力强等优点。
本设计采用六轮履带式结构,确保履带式清洁机器人在整个运行过程的稳定性;在履带式清洁机器人上装上RT530无线WiFi功能模块。此外,本设计采用低功耗的8位单片机STC12C5A60S2作为主控芯片,降低了整个系统的功耗,大大提高了本设计的实用性和可靠性。
1 系统基本工作原理
本设计的总体框架由智能手机终端、履带式清洁机器人系统终端组成,其中手机终端由手机WIFI助手APP和WIFI功能模块组成,履带式清洁机器人系统终端由主控模块、TB6612FNG直流电机驱动模块、ZXVA消防电源监控模块、RT5350无线WIFI模块等组成。手机WIFI助手APP通过人为编辑动作指令,再由WIFI功能模块负责发送指令给安装在履带式清洁机器人系统上的RT5350无线WIFI模块该系统工作原理框图如图1所示。
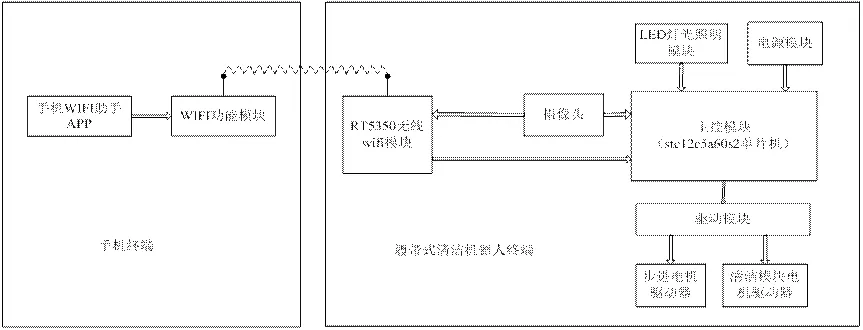
图1 履带式管道清洁机器人系统工作原理框图
2 主要硬件电路设计与结构优化
2.1 硬件总电路
系统硬件部分由核心控制模块、TB6612FNG直流电机驱动模块、RT5350WIFI模块、摄像头监控模块、ZXVA消防电源监控模块等组成,硬件系统总电路图如图2所示。其中核心控制模块由STC12C5A60S2单片机和外围电路组成,外围电路包括晶振电路、复位电路和电源电路。
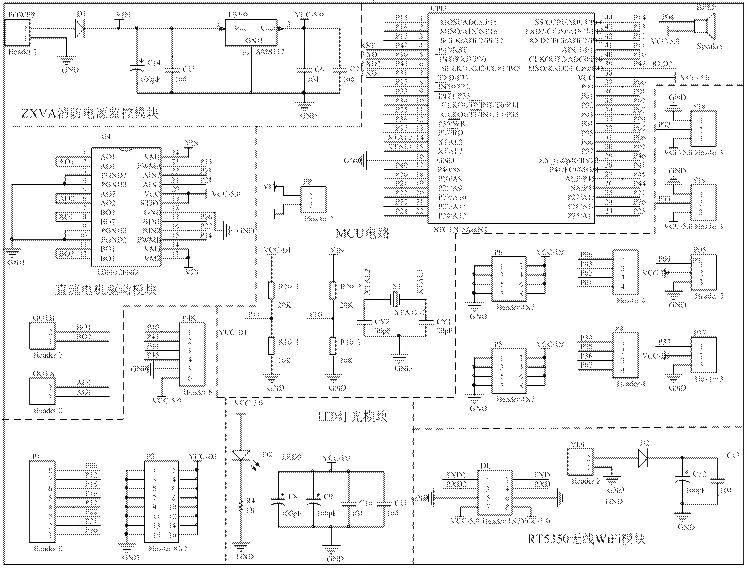
图2 硬件总电路原理图
2.2 驱动模块电路
本设计采用TB6612FNG直流电机驱动模块驱动两个直流电机M1、M2,TB6612FNG直流电机驱动模块电路图如图2所示。TB6612FNG直流电机驱动模块的主要引脚功能:AINl/AIN2、BIN1/BIN2、PWMA/PWMB为控制信号输入端;AO1/A02、B01/B02为2路电机控制输出端;STBY为正常工作/待机状态控制引脚;VM(4.5~15 V)和VCC(2.7~5.5 V)分别为电机驱动电压输入和逻辑电平输入端。TB6612FNG直流电机驱动模块与单片机组成电机控制单元,单片机的定时器B能够产生4路PWM输出作为AIN1/AIN2和BIN1/BIN2端口的控制信号,且PWM占空比的大小能够决定输出电压平均值,进而决定电机的转速大小。该模块工作时STBY引脚置为高电平;AIN1和AIN2电压保持不变,调整PWM引脚的输入信号可进行电机单向速度控制;置PWM引脚为高电平,并调整AIN1和AIN2的输入信号可进行电机双向速度控制。
2.3 RT5350WIFI模块电路
本设计所使用的RT5350无线WiFi模块是基于通用串行接口的符合网络标准的嵌入式模块,内置TCP/IP协议栈,能够实现用户串口、以太网、无线网(WIFI)3个接口之间的任意透明转换。该模块有五种低功耗工作模式:1)AP模式:默认的工作模式。在这种模式下,该模块是一个无线接入点;2)Router模式:在这种模式下,该模块是相当于一个无线路由器,有线接口作为广域网,无线局域网。多个无线客户端可以共享一条ADSL线路;3)中继模式:在这种模式下,使用的继电器模块的无线功能,无线信号的中继和放大,并形成新的无线网络覆盖区域,并最终扩展无线网络的覆盖范围的目的;4)Bridge(桥接)模式:在这种模式下,使用设备的桥接功能,第一的RM04无线网络,与前端建立一个无线连接,然后发送无线信号,形成新的无线覆盖,可以有效的解决信号弱和盲点和其他无线信号覆盖问题;5)Client模式:在这种模式下工作的AP的无线客户端,相当于一个无线网卡。
WiFi模块建立连接后,当没有数据传输时,就将其工作模式置为AP模式,当主设备(智能手机WiFi终端)需要再次传输数据时,需要向从设备(RT5350无线WIFI模块)发送退出命令。从设备退出AP模式后,即可与主设备进行数据信息传输交换。如图3为RT5350无线WIFI模块电路图,RT5350无线WIFI模块的RXD引脚与单片机串口的TXD引脚相连,RT5350无线WIFI模块的TXD引脚与单片机的RXD引脚相连,并设置了一个LED指示灯,当RT5350无线WIFI模块上电后,蓝色指示灯闪烁,当RT5350无线WIFI模块与手机连接成功后,指示灯常亮。
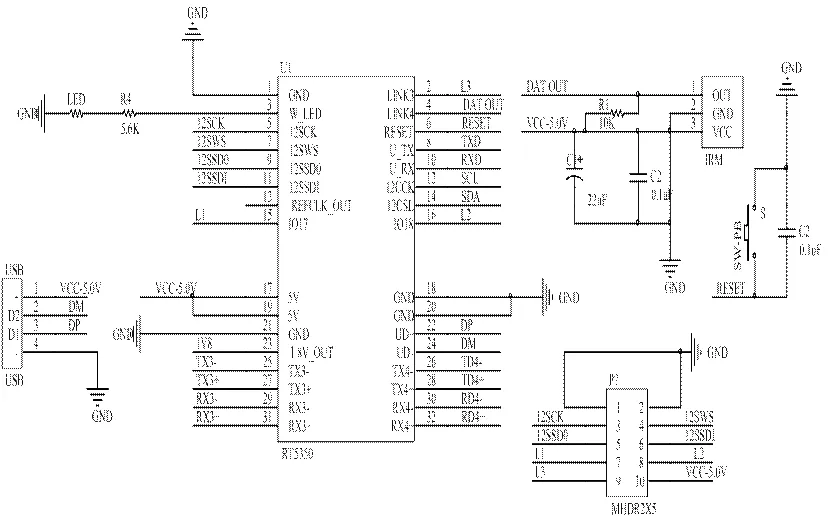
图3 RT5350无线WiFi模块电路原理图
2.4 行走系统结构优化
本设计在以往清洁器机器人的基础上,对其运行结构进行进一步的优化,实质具有一定的地形适应能力,提高其工作平稳性。图4是履带式清洁机器人行进结构示意图。它由1个驱动轮和5个行进轮组成,该结构最大长度24CM,高度7CM,前端与地面形成40度的弧角。在平面上运行时,以驱动轮带动行进轮前进;在遇到障碍时,可利用自身结构适应一定的障碍地形,不会像其他轮式清洁机器人在通过障碍物时发生侧翻或者停止前进。如图5是履带式清洁机器人越障示意图,对履带式清洁机器人系统的顺利越过障碍的过程进行了图解。
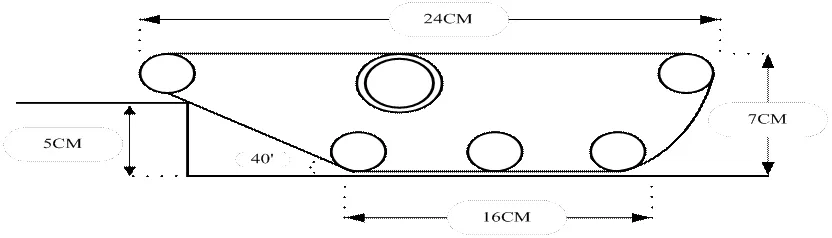
图4 行走系统结构图
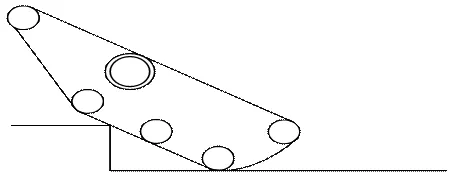
图5 越障示意图
3 系统软件设计
系统上电后首先进行各个模块的初始化设定,包括端口的初始化配置和寄存器的初始化配置。采用定时器B输出两路频率固定且占空比可调的PWM信号来控制履带式清洁机器人行驶的速度,通过配置CCAP0寄存器设定PWM信号的频率为1KHZ,通过配置CCAPM0 、CCAPM1两个寄存器来改变两路PWM信号的占空比从而改变履带式清洁机器人行驶的速度,初始化配置CCAPM0 = 0x42,CCAPM1 = 0x42;对于RT5350WiFi模块的初始化配置中,首先进行模块的端口配置,进而初始化串口配置,设定波特率的值为9600bps,并允许串口的发送和接收中断;初始配置履带式清洁机器人为上电静止状态,程序运行完系统的初始化后,继而进入while主循环中进行各个模块的数据处理,如图6所示为履带式清洁机器人控制系统主流程图。
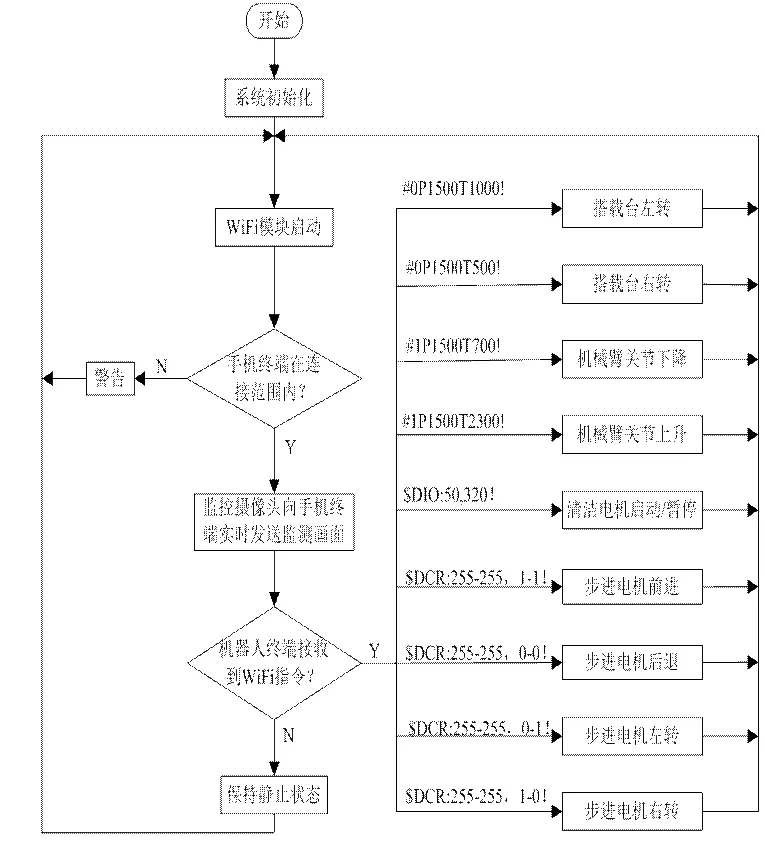
图6 系统主程序流程图
4 实验结果与分析
履带式管道清洁机器人控制系统的实验样机如图7所示。履带式管道清洁机器人的顶部为一块STC12C5A60S2单片机最小系统板,由它控制整个系统的正常运行。在核心板的周围分布有ZXVA消防电源监控模块、TB6612FNG直流电机驱动模块、RT5350无线WiFi模块等。RT5350无线WiFi模块能否实现无线遥控机器人系统完成前进、后退、加速、减速、左转、右转、启动/停止清洁电机、实时监控拍摄;系统能否顺利跨越障碍等功能。
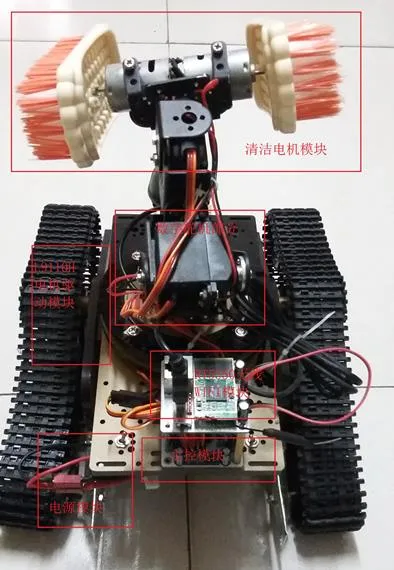
图7 履带式清洁机器人控制系统实验样机图
4.1 路径测试
首先在智能手机上安装智能WiFi控软件,提示安装成功后,打开该软件,将模块的TXD端连接单片机的串口接收引脚,RXD端连接单片机的串口发送引脚,此时给安装在履带式清洁机器人上的RT5350无线WiFi模块上电,这时模块进入AT命令响应状态,蓝灯闪烁,程序中完成了对RT5350无线WiFi模块的初始化配置后,打开手机WiFi功能自动搜索周围的WiFi信号并进行连接,若手机连接到RT5350无线WiFi模块后,及时打开智能WiFi控软件,如图8所示,软件开始界面会提示输入RT5350无线WiFi模块IP地址及本设计所用到的RT5350无线WiFi模块的匹配密码,如图9所示,输入密码配对成功后,界面即提示与手机连接成功,进入控制界面。
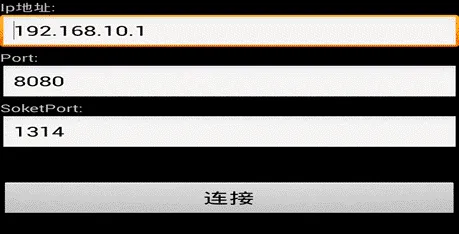
图8 WiFi模块IP地址图

图9 手机WiFi助手界面
图10所示为WiFi遥控机器人前进、后退和转弯测试图。程序中设定机器人初始状态停止,当RT5350无线WiFi模块与手机连接成功后,按界面的向上按钮,智能手机的RT5350无线WiFi模块模块将会发送特定的指令给机器人终端,机器人终端再对该指令进行判断和处理,进而使机器人向前行驶;与此类似,当按界面的向下、向左和向右按钮时,机器人将分别进行后退、左转弯和右转弯行驶。由图10可知,该清洁机器人具有前进、后退、左转和右转等路径行走功能。
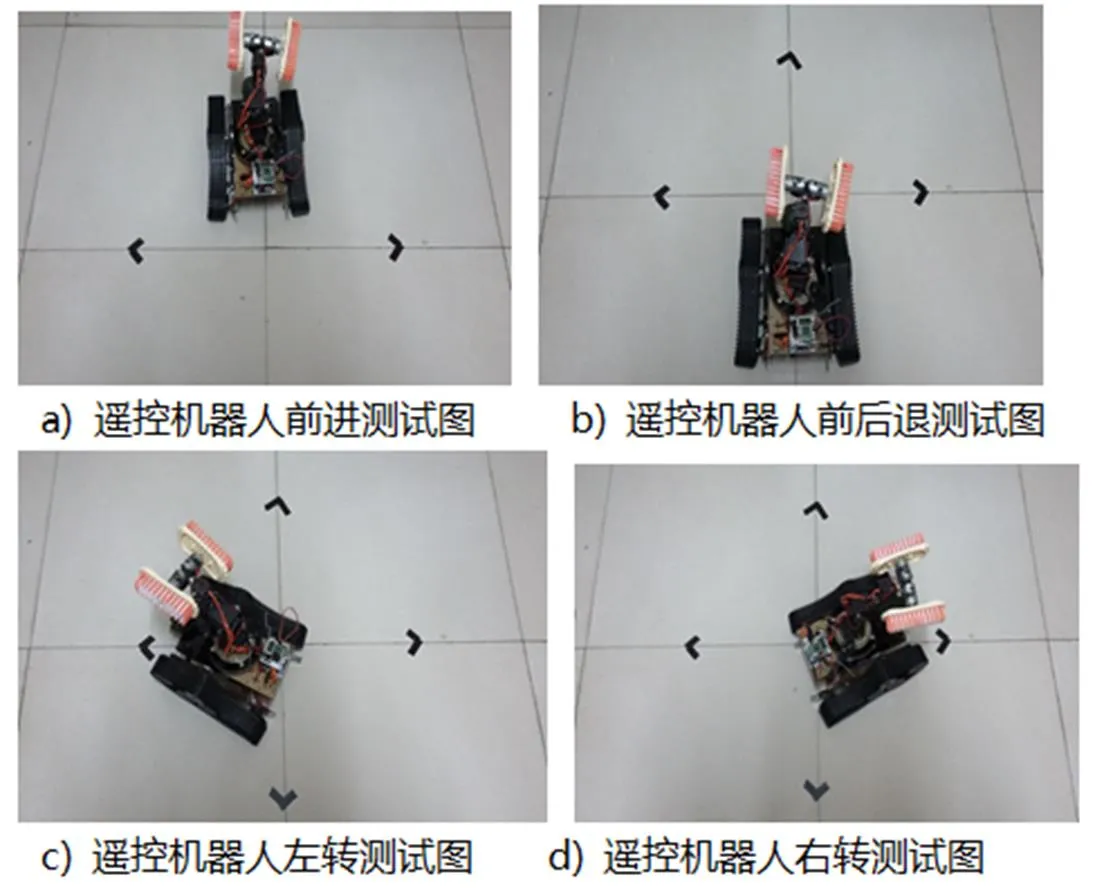
图10手机WiFi遥控机器人路径测试图
4.2 清洁效果测试
履带式清洁机器人采用与管道相适应的清洁刷,通过驱动直流电机带动清洁刷,从而对管道进行清洁。如图11所示为模拟履带式清洁机器人在管道内部工作图。表1记录了履带式清洁机器人系统进行管道清洁作业的次数对清洁效果的影响。

a)机器人到达管道清洁位置 b)机器人进行清洁
图11模拟履带式清洁机器人在管道内部工作图
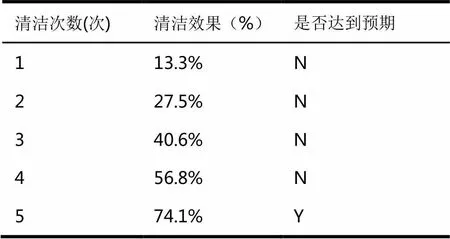
表1 清洁效果示意表
5 结论
本文提出了一种履带式管道清洁机器人系统,该系统采用低功耗的STC12C5A60S2单片机作为系统控制芯片以及全双工通信的RT5350无线WiFi模块作为无线模块,该控制芯片能快速有效地进行数据处理,该无线模块有效解决了管道内信号传输困难的问题。通过对该履带式清洁机器人系统的功能测试表明:该管道清洁机器人具备携带摄像机监控管道环境、机械手臂对管道进行除尘,实时通讯等功能,能有效解决部分通风管道的复杂环境清洁问题。
[1]田海晏, 薛龙, 孙章军. 直进轮式微型管道机器人的行走系统设计[J].北京石油化工学院学报, 2006, 24 (02):45-47
[2]骆清国, 司东亚, 龚正波. 基于RecurDyn的履带车辆动力学仿真[J]. 车辆与动力技术, 2011, 13 (4): 26-28.
[3]王娅, 任升峰, 徐明刚等. 中央空调管道清洁机器人系统的设计. 机械设计与研究 [J]. 华中科技大学学报,2005, 21 (6): 47-49.
[4]王洪锋, 夏明飞, 王坚. 单片机与微机的远距离串行通信[J]. 电力自动化设备, 2002, 22 (5): 59-67.
[5]蔡自兴.智能控制及移动机器人研究进展[J]. 中南大学学报, 2005, 36 (5):121-127.
[6]严乔.基于WiFi无线网络的智能识别机器人研究与实现[J].通信与信息系统, 2010, 12 (3): 23-36
[7]马潮. 高档8位单片机原理与开发应用指南[M]. 北京: 北京航空航天大学. 2004. 12.(3):28-255
[8] 张洪润.传感器应用设技300例[M]. 北京: 航空航天大学出版社, 2008: 121-149.
[9] 周润景, 张丽娜, 刘印群. PROTEUS入门使用教程[M]. 北京: 机械工业出版社. 2007: 117-119.
[10]郭天祥. 新概念51单片机C语言教程[M].北京:电子工业出版社, 2008: 12-40.
[11]蔡大山,朱小祥, 陈贵银编著.PCB制图与电路仿真[M].北京: 电子工业出版社, 2010:116-136.
Design of the Control System in Pipeline-Cleaning Robots with Tracks
(Hunan City University , Yiyang Hunan 413002)
The internal structure of MCU having integrated 2-way PWM with 8-way and 10-bit high-speed A/D conversion generates the PWM wave, which completes A/D conversion and makes the peripheral circuit simpler. By using TB6612FNG dc motor driving module and RT5350 wireless WiFi module that forms the closed-loop feedback mode to control motor and transmit information, the system’s working efficiency is enhanced.
Robot; tracks; MCU ; Wireless module
(责任编辑:廖建勇)
TG580.23+5
A
10.3969/j.issn.1672-7304.2016.06.035
1672–7304(2016)06–0079–04
湖南省大学生研究性学习和创新性实验计划项目(项目编号:湘教通〔2014〕248号430)。
彭兴(1992-),男,湖南湘阴人,研究方向:智能电子系统。
