基于后向差分Delta算子的卡尔曼滤波算法及其仿真
2016-10-14宋召青
宋召青,王 康
基于后向差分Delta算子的卡尔曼滤波算法及其仿真
宋召青1,王 康2
(1. 海军航空工程学院七系 山东烟台 264001;2. 海军航空工程学院研究生管理大队 山东烟台 264001)
在高速采样时,Delta算子离散化模型的参数趋于原来的连续时间模型,且Delta算子实现时系统具有较好的数字特性,使其能够改善基于传统移位算子的离散卡尔曼滤波中存在的滤波发散问题。该文采用正交投影法,推导了基于Delta算子的随机线性离散系统的卡尔曼滤波方程,最终给出了基于后向差分Delta算子的卡尔曼滤波递推算法,并进行了仿真研究。实验结果和性能分析表明,在高频采样情形下基于后向差分Delta算子的递推卡尔曼滤波的收敛性能优于常规卡尔曼滤波。
后向差分; Delta算子; 卡尔曼滤波; 正交投影
随着计算机和自动化技术的飞速发展,现今的自动控制系统的设计思路都来源于数字计算机的广泛应用,为了呈现出系统特性,必须对系统的离散时间进行描述。因此,人类对高速采样情形下信号传输和处理问题的需求日益增加[1-2]。然而,当采用传统的移位算子处理高速采样系统时,计算机有限字长将会引起采样系统量化误差以及极限环振荡等数值不稳定问题[3],且易于引入非最小相位零点,导致离散化系统稳定性能降低。为此结合随机线性系统Kalman滤波基本方程[4-5],文献[6]采用Delta算子方法对随机线性连续系统进行离散化,有效解决了上述问题。
Delta算子是一种新的离散化方法,现已成为连续时间模型和离散时间模型的统一描述方法,用它来描述离散系统有如下优点[7]:1) 在高频采样情况下,能使离散化模型趋近于连续模型。2) Delta算子实现时具有较好的数字特性,包括有限字长特性和系数灵敏度等。3) Delta算子模型中易于观察分析不同采样周期下系统性能。另外,基于传统移位算子的离散卡尔曼滤波模型存在对模型噪声和量测噪声的统计特性认识不足导致的方差取值不合适以及计算机有限字长导致的舍入误差累计等问题,最终出现滤波发散现象[8]。因此将Delta算子引入卡尔曼滤波中进行研究[9-10],推导新的滤波算法,有效改善系统在高速采样情况下的滤波发散问题。
文献[11]给出了Delta算子的前向差分和后向差分的定义,本文分别分析了基于前向差分和后向差分Delta算子的递推卡尔曼滤波方法的合理性,最终推导了基于后向差分Delta算子的递推卡尔曼滤波。
1 Delta算子及正交投影法
1.1 Delta算子定义
Delta算子的前向差分定义为:
Delta算子的后向差分定义为:
1.2 正交投影法
向量正交投影具有下列结论[4]:
2 随机线性连续系统的离散化
考虑如下形式的连续模型[12]:
2.1 Z域离散化
2.2 基于后向差分Delta域的离散化
式中,
2.3 基于前向差分Delta域的离散化
可见,两者的区别在于系统的状态方程不同,而观测方程保持一致。
3 基于后向差分Delta算子的递推卡尔曼滤波
3.1 基于前向差分和后向差分Delta算子的卡尔曼滤波合理性分析
由基于前向差分Delta域的离散化系统状态方程式(11)和量测方程式(12),对于给定的观测空间,根据正交投影的定义可得:
所以由正交投影的结论2)和结论3)得:
同时根据Delta算子前向差分定义有:
比较式(14)和式(15)可得:
式(16)表示在时域中,基于前向差分Delta算子的状态滤波值和状态预测估计值无法分辨,所以采用后向差分的Delta算子的状态差分方程式(8)和量测方程式(9)推导基于Delta算子的卡尔曼滤波递推算法。
3.2 基于后向差分Delta算子的卡尔曼滤波递推算法推导
1) 基于Delta算子的滤波方程。
2) 新息及新息方差阵。
由以上新息的概念可知:
故可以得到新息方差阵为:
3) 基于Delta算子的一步最优预测。
4) 基于Delta算子的预测误差方差阵。
Delta状态预测误差为:
故其方差阵可表示为:
5) 滤波方程的预测。
由Delta算子的定义以及正交投影的定义和结论,对Delta状态滤波方程进行预测,有:
式中,
6) 状态预测误差方差阵。
由式(19),易知:
将式(29)带入式(28),整理得到:
将式(21)和式(31)带入式(27)中,有:
易知滤波误差为:
故得滤波误差方差阵为:
要化简式(30),需要对上式各项进行计算,并注意到:
化简可得:
结合式(24)、式(30)和式(32),可得:
带入式(37)中,最终得到:
至此得到了基于后向差分Delta算子的卡尔曼滤波递推算法。
4 仿真分析
在目标跟踪过程中,由于目标的位置、速度、加速度的测量值在任何时候都会产生噪声,卡尔曼滤波能够利用目标的动态信息降低噪声的影响,获得关于目标位置好的估计,因此卡尔曼滤波在目标跟踪有着广泛的应用。
4.1 目标跟踪数学模型
4.2 滤波仿真分析
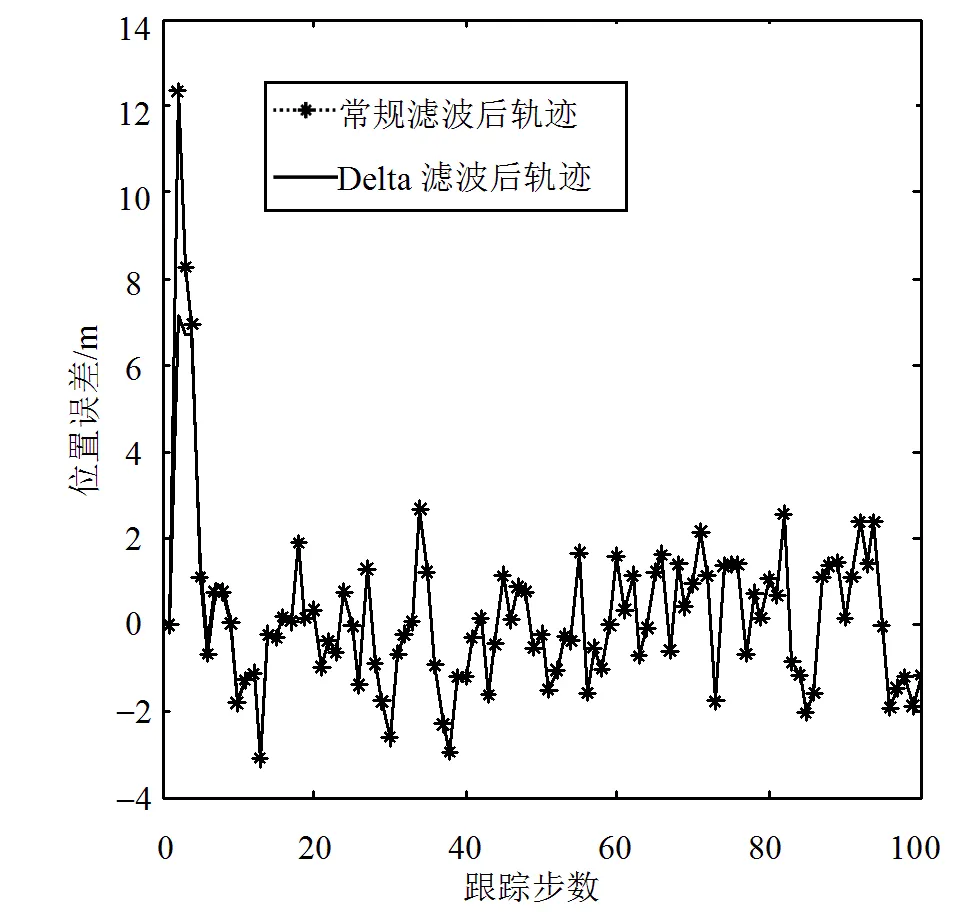
图2 滤波后位置误差图()
图1直观地反映了通过常规卡尔曼滤波后的轨迹与基于后向差分Delta算子的递推卡尔曼滤波后的轨迹与真实轨迹的对比,可以看出两者滤波效果差异不明显。而图2不仅反映了两种滤波方法的收敛速度相当,另一方面从位置误差的波动幅度反映出两者滤波性能亦相当。
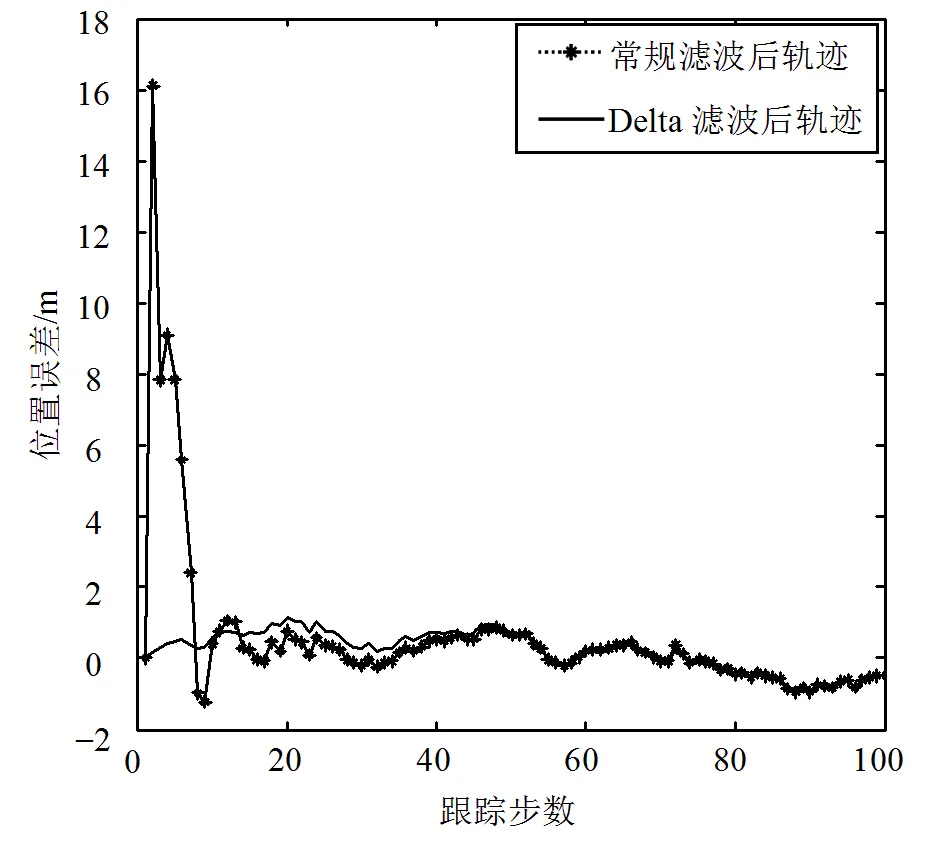
图3 滤波后位置误差图()

图4 滤波后位置误差图()
5 结 束 语
本文基于Delta算子在高频采样情形下使离散化系统模型趋近于连续系统模型的特性,结合正交投影法推导了基于Delta算子的递推卡尔曼滤波算法,包含Delta状态滤波方程、新息方差阵、Delta状态最优预测、Delta状态预测方差阵的计算、状态滤波方程的预测、状态预测误差方差阵的计算和状态滤波误差方差阵,并进行了仿真实验。由仿真结果可以得到,随着采样周期减小,常规卡尔曼滤波算法收敛性能变慢,推导的基于后向差分Delta算子的递推卡尔曼滤波算法滤波性能良好,在高速采样情形下,其在速度收敛性以及误差波动幅度方面均优于常规卡尔曼滤波算法。
参 考 文 献
[1] NEWMAN M J, HOLMES D G. Delta operator digital filters for high performance inverter applications[J]. IEEE Transactions on Power Electronics, 2003, 18(1): 447-454.
[2] FAN H, DE P. High speed adaptive signal processing using the Delta operator[J]. Digital Signal Processing: a Review Journal, 2001, 11(1): 3-34.
[3] LI Gang, GEVERS M. Comparative study of finite wordlength effects in shift and Delta operator parameterizations[J]. IEEE Transactions on Automatic Control, 1993, 38(5): 803-807.
[4] 吴卫星. 线性随机系统的参数估计与自适应滤波[D]. 武汉: 中国科学院武汉物理与数学研究所, 2001.
WU Wei-xing. Parameter estimate and adaptive filtering of linear random system[D]. Wuhan: Wuhan Institute of Physics and Mathematics, Chinese Academy of Sciences, 2001.
[5] 付梦印, 邓忠红, 张继伟. Kalman滤波理论及其在导航系统中的应用[M]. 北京: 科学出版社, 2003.
FU Meng-yin, DENG Zhong-hong, ZHANG Ji-wei. Kalman filter theory and its application in navigation system[M]. Beijing:Science Press, 2003.
[6] 李惠光, 武波, 李国友, 等. Delta算子控制及其鲁棒控制理论基础[M]. 北京: 国防工业出版社, 2005.
LI Hui-guang, WU Bo, Li Guo-you, et al. The basic theory of Delta operator control and its robust control[M]. Beijing: National Defend Industy Press, 2005.
[7] 张端金. Delta算子系统的建模与控制[D]. 南京: 南京理工大学, 1998.
ZHANG Duan-jin. Modeling and control of Delta operator systems[D]. Nanjing: Nanjing University of Science and Technology, 1998.
[8] 彭丁聪. 卡尔曼滤波的基本原理及应用[J]. 软件导刊, 2009, 8(11): 32-34.
PENG Ding-cong. Basic principle and application of Kalman filter[J]. Software Guide, 2009, 8(11): 32-34.
[9] MIDDLETON R H, GOODWIN G C. Improved finite word length characteristics in digital control using Delta operators[J]. IEEE Trans Automat Contr, 1986, AC-31(11): 1015-1021.
[10] YANG Hong-jiu, XIA Yuan-qing, SHI Peng, et al. A novel Delta operator Kalman filter design and convergence analysis[J]. IEEE Transactions on Circuits and System, 2011, 58(10): 2458-2468.
[11] 李惠光, 张尚斌, 王墨琦. 基于前向差分Delta算子的LMS自适应滤波算法[J]. 数据采集与处理, 2009, 24(2): 189-192.
LI Hui-guang, ZHANG Shang-bin, WANG Mo-qi. Adaptive LMS algorithm using forward Delta operator[J]. Journal of Data Acquisition and Processing, 2009, 24(2): 189-192.
[12] 秦永元, 张洪钺, 汪叔华. 卡尔曼滤波与组合导航原理[M]. 西安: 西北工业大学出版社, 2007.
QIN Yong-yuan, ZHANG Hong-yue, WANG Shu-hua. Kalman filter and the principle of integrated navigation[M]. Xi’an: Northwestern Polytechnical University press, 2007.
编 辑 漆 蓉
Kalman Filter Algorithm Based on Backward Differentiation Formula of Delta Operator with Simulation
SONG Zhao-Qing1and WANG Kang2
(1. The Seventh Department, Naval Aeronautical and Astronautical University Yantai Shandong 264001; 2. Graduate Students' Brigade, Naval Aeronautical and Astronautical University Yantai Shandong 264001)
In the high-speed sampling, the parameters of the discrete model based on delta operator tend to the original continuous-time model, and the system has a better digital characteristic when delta operator achieves, which can improve the problem of filtering divergence of discrete Kalman filters based on traditional shift operator. This article uses orthogonal projection approach to derive the Kalman filter equation of stochastic linear discrete systems based on delta operator. The recursive Kalman filter algorithm based on delta operator is given. The simulation results show that in the high-speed sampling, the convergence performance of the derived Kalman filter based on backward differentiation formula of delta operator is better than the traditional Kalman filters.
backward differentiation; Delta operator; Kalman filter; orthogonal projection approach
O23
A
10.3969/j.issn.1001-0548.2016.05.010
2015-04-16;
2015-09-30
国家自然科学基金重点项目(61433011);山东省优秀中青年科学家科研奖励基金(BS2012DX007);上海市博士后科研计划(12R21414300)
宋召青(1969-),男,博士,教授,主要从事控制理论及应用方面的研究.
