永磁同步电机控制系统带过调制的弱磁控制策略研究
2016-10-14涂群章林加堃曾繁琦邹世超陆影
涂群章,林加堃,曾繁琦,邹世超,陆影
(1.解放军理工大学野战工程学院,江苏南京210007;2.军事交通学院军用车辆系,天津300161;3.海拉(厦门)电气有限责任公司,福建厦门361100)
永磁同步电机控制系统带过调制的弱磁控制策略研究
涂群章1,林加堃1,曾繁琦2,邹世超3,陆影1
(1.解放军理工大学野战工程学院,江苏南京210007;2.军事交通学院军用车辆系,天津300161;3.海拉(厦门)电气有限责任公司,福建厦门361100)
永磁同步电机控制系统在实际应用中,复杂多变的工况对电机的响应需求是不同的。为了拓宽电机控制系统的调速范围,且满足系统对转矩响应能力和大转矩输出特性的要求,在弱磁控制策略的基础上引入过调制方法,将其应用于永磁同步电机控制系统,并进行仿真和实验研究。结果表明,相比于无过调制的弱磁控制策略,带过调制的弱磁控制策略能使系统在调速过程中充分利用直流母线电压,从而提高了转矩响应和大转矩输出能力,缩短了转速响应时间,同时电机的工作效率符合应用要求。
兵器科学与技术;永磁同步电机;控制系统;弱磁控制;过调制
0 引言
永磁同步电机(PMSM)的励磁由永磁体提供,没有励磁损耗,因此,与一般电机相比,PMSM具有更高的功率密度和效率,从世界电传动研究情况以及电机发展水平来看[1],PMSM是军用电传动履带推土机的最佳选择。军用履带推土机由于要求具备良好的机动性,因而需要尽量扩大其驱动电机的调速区间;在推土作业工况下则要求电机控制系统具有快速准确的转矩响应,在爬坡、突然加减速和深度挖掘时还应具有高效的大转矩输出特性。
为了拓宽电机调速范围,PMSM可采用弱磁控制策略。对电机进行弱磁控制时,由于电压接近饱和[2],电机的转矩响应能力会弱化。因此为了进一步提高直流电压利用率,人们在调制方法和过调制方法方面都进行了相关研究,在正弦波脉宽调制(SPWM)参考电压中加入3次谐波可提高电压利用率和消除特定次数谐波的离线脉宽调制方法[3]等都是在调制方法方面的改进,过调制方法则是在1991年Kerkman等提出逆变器增益的概念后开始得到了深入研究[4-7]。因此,为了同时提高其转矩响应能力,考虑将过调制方法应用于弱磁控制策略。
本文以军用电传动履带推土机驱动系统电机为例,将带过调制的弱磁控制策略引入到PMSM控制系统中,进行了仿真分析和实验研究。
1 过调制方法分析和实现
在永磁同步电机控制中,为了实现正弦电流输出,控制电压必须为正弦输出,通常采用脉宽调制(PWM)技术来获得正弦的三相电压波形,但是由于逆变器电压实际上仍然是脉冲电压,三相绕组中电流的谐波成分较多,使得电源电压的利用率较低。而空间矢量脉宽调制(SVPWM)技术以三相正弦电压产生的圆形磁链为基准,可以产生谐波较少且直流电源电压利用率较高的输出,并具有结构简单、成本低和控制技术成熟等优点[8],是目前逆变器中使用最广泛的技术。
电压源逆变器6个开关管的开关组合状态共有8个,相对应为6个非零电压矢量和两个零电压矢量。其中6个非零矢量幅值相同,都为2UDC/3,在空间上均匀分布,将整个复平面划分为6个扇区,而两个零矢量位于中心。空间矢量即由这6个扇区组成,逆变器输出电压矢量由参考值所在扇区的两个非零矢量和零矢量线性合成,任何输出电压不能超出该空间矢量六边形的范围。此时定义SVPWM的调制度M为

式中:Uo为逆变器输出电压矢量;US为SVPWM宽调制的载波电压最大幅值。6个基本电压矢量顺序输出后可以得到US=2UDC/π,即为相电压基波幅值。
当Uo的轨迹为正六边形内切圆,即Uo取最大幅值时,则线性调制度最大可以达到0.907,此时母线电压仍未被线性调制充分有效地利用。输出电压矢量Uo在稳态时跟踪给定的参考电压矢量,当0≤M≤0.907时,SVPWM处于线性调制阶段,输出电压矢量轨迹为圆形;当M继续增大时,通常需要借助一定的限制来调整输出电压矢量,才能够实现输出,这种通过一定限制调整输出电压矢量的方法称为过调制[9]。在实际控制中,为了使得弱磁控制与母线电压独立,减少母线电压波动性对控制参数的影响[10],一般对电压值进行归一化处理:

Uo与UM线性相关,在线性调制下,k的取值范围为[0,1];在过调制下,k的取值范围为当时,Uo的端点在空间矢量六边形的顶点上。
以第一扇区为例,线性调制和过调制的实现如图1所示,其他扇区可依此类推。
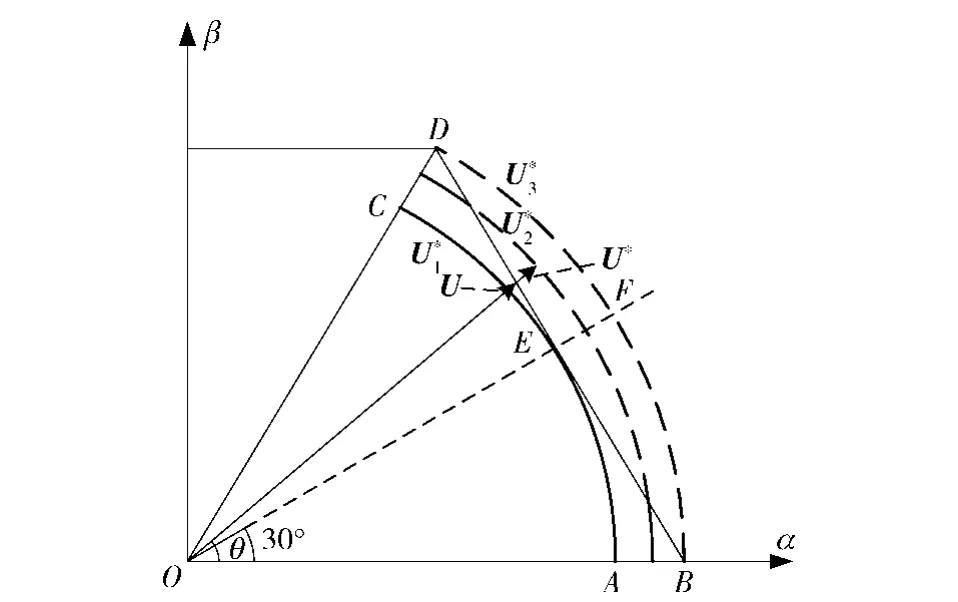
图1 过调制方法示意图Fig.1 Schematic diagram of overmodu1ation method
2 带过调制的输出电压闭环弱磁控制
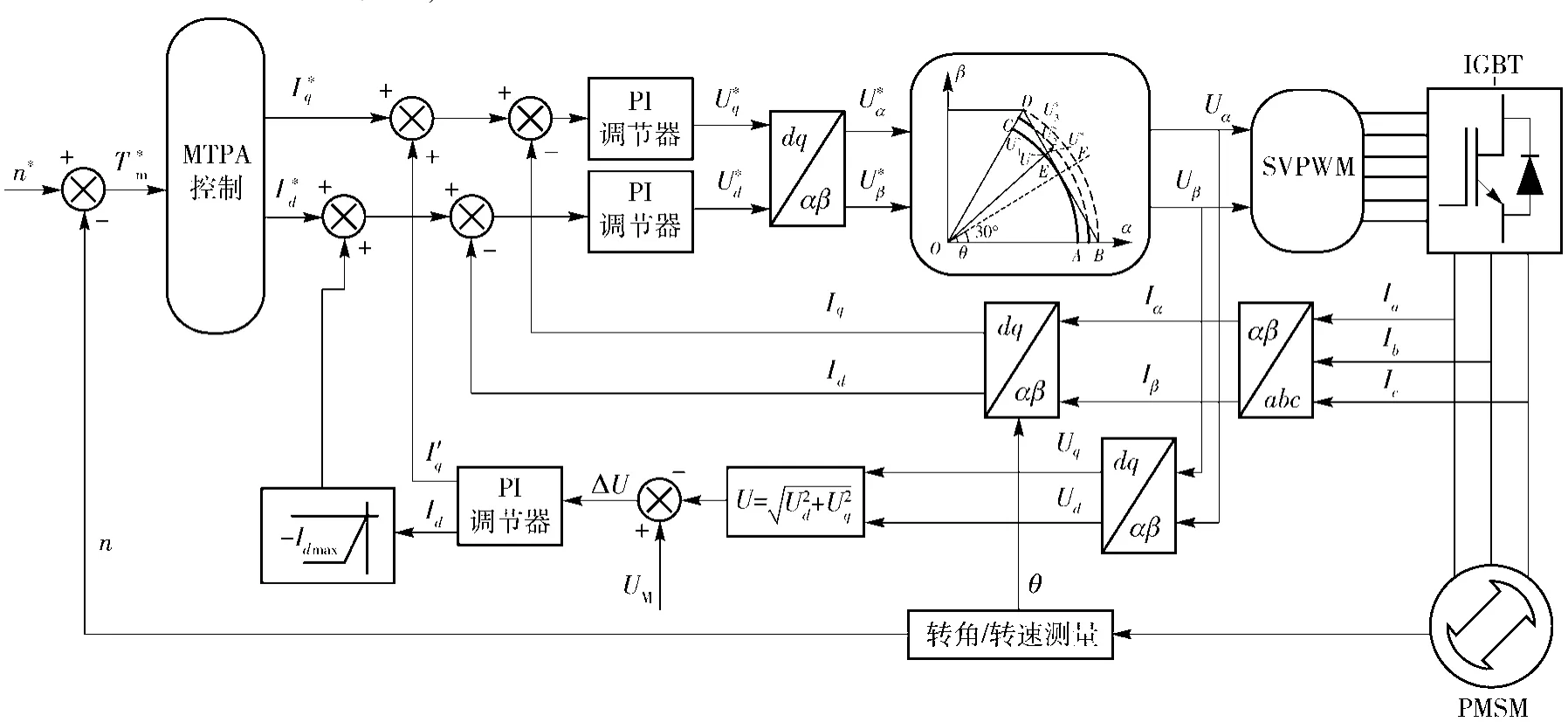
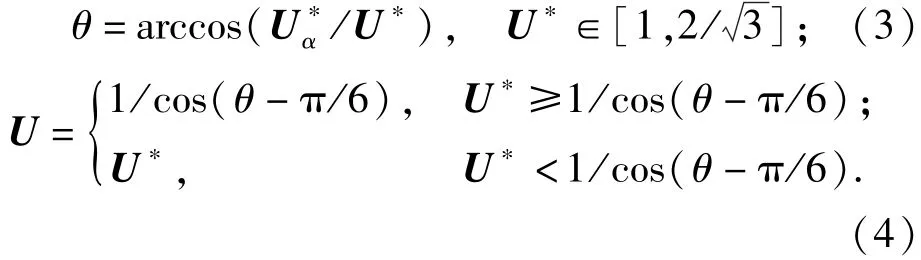
图2 永磁同步电机控制策略框图Fig.2 B1ock diagram of PMSM contro1 strategy
PMSM控制在弱磁区域时,其输出电压已经接近电压极限值,可用于电流控制的电压余量很小,电机的转矩响应能力弱化[12]。因此,希望能够提高电机在弱磁区域的转矩响应性,以改善电机的调速性能。而PMSM的输出转矩主要受交、直轴电流的影响,因此提高电机的转矩响应性,即是提高电机的电流响应速度。
基于负d轴电流补偿的输出电压闭环弱磁控制策略,是通过削弱磁场的方法在保持端电压不变的情况下提高转速,基本不依赖于电机参数的变化,可以使得电机保持较高的效率,鲁棒性较好。但这一传统的弱磁控制策略为了保持电机控制系统的动态性能,需要保留一定的电压余量,所以电机的实际电压利用率只有86.6%[13],没有能够充分利用直流母线电压,因此考虑引入过调制方法来提高直流母线电压的利用率,从而使电机在弱磁区域时具有更大的电压余量。
如图2所示,PMSM控制系统在矢量控制和弱磁控制的基础上,增加了过调制环节。该控制策略的基本原理是:依据最优转矩控制(MTPA)控制模块中的转矩电流关系式算法[14]可实现以最小定子电流产生最大输出转矩的优化目标,因此给定电机输出转矩可得所需d轴和q轴最小电流通过比例积分(PI)调节器输出相应的d轴和q轴电压其经过矢量控制Park变换后转换为α轴和β轴电压过调制方法将该电压值始终限制于电压矢量六边形范围以内。图2中:Id、Iq为过调制限制后的d轴和q轴电流;Ud、Uq为过调制限制后的d轴和 q轴电压;Uα、Uβ为过调制限制后的α轴和β轴电压;n*为目标转速;T*m为目标转矩;Ia、Ib、Ic为三相定子电流;UM为线性调制最大在电压。电机控制器根据过调制限制后的电压值,采用空间电压矢量SVPWM技术来控制功率逆变器绝缘栅双极型晶体管(IGBT),从而实现对PMSM的控制。同时,在闭环控制中实时监测电流调节器的电压输出作为反馈电压,经过Park逆变换后,外电压环将其与参照电压进行比较。参照电压在弱磁控制策略引入过调制方法后可增大为线性调制最大电压UM,反馈电压为过调制限制后的输出电压。一旦反馈电压值超出电压极限值UM,则通过PI调节器负向增大Id的电流值来输出当前弱磁控制所需的弱磁电流[15]。带过调制的弱磁控制策略能够最大限度的利用逆变器的输出能力,使电机在稳态工况下能够维持在最大线性调制区域,有效提高直流母线电压的利用率。
3 仿真建模与分析
在Mat1ab环境下,采用 SIMULINK和 SIMSCAPF的块图模型建立PMSM控制系统的仿真模型,如图3所示。电机控制系统主电路主要由直流电源DC、逆变器和内置式PMSM组成,PMSM调速系统模块用于实现电机磁场定向矢量控制,主要包括SVPWM,基于负Id电流补偿的弱磁控制,基于转矩限制的MTPA控制,三相静止坐标到d轴和q轴旋转坐标的变换(即C1ark变换和Park变换),PI调节等子模块。在PMSM调速系统模块中,过调制方法采用算法语句编写,其程序框图如图4所示。

图3 永磁同步电机控制系统仿真模型Fig.3 Simu1ation mode1 of PMSM contro1 system
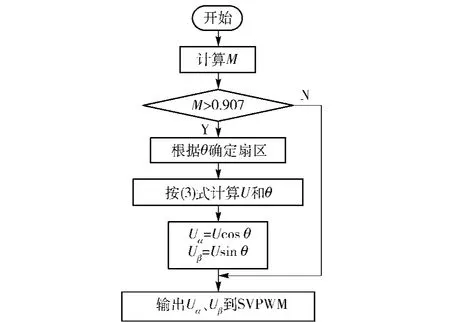
图4 过调制程序框图Fig.4 F1ow chart of overmodu1ation a1gorithm
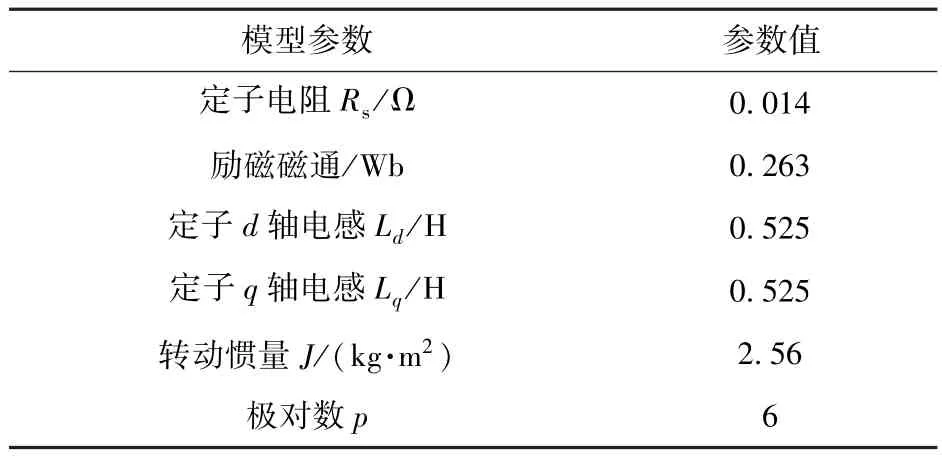
表1 永磁同步电机模型参数Tab.1 Mode1 parameters of PMSM
在该系统中,直流电源DC为540 V,逆变器的电力电子器件选项选择IGBT,PMSM的励磁类型选择 sinusoida1,电机额定功率为 100 kW,参考文献[16],根据额定功率确定电机模型参数(见表1)。设定线性调制最大电压UM=312 V,转速为n= 3 500 r/min,阶跃负载TL=300 N˙m,仿真时间为50 s.仿真过程为电机空载启动达到目标转速,在30 s时给电机施加阶跃负载。模型仿真后的输出电压矢量轨迹图如图5所示,仿真曲线对比图如图6所示。
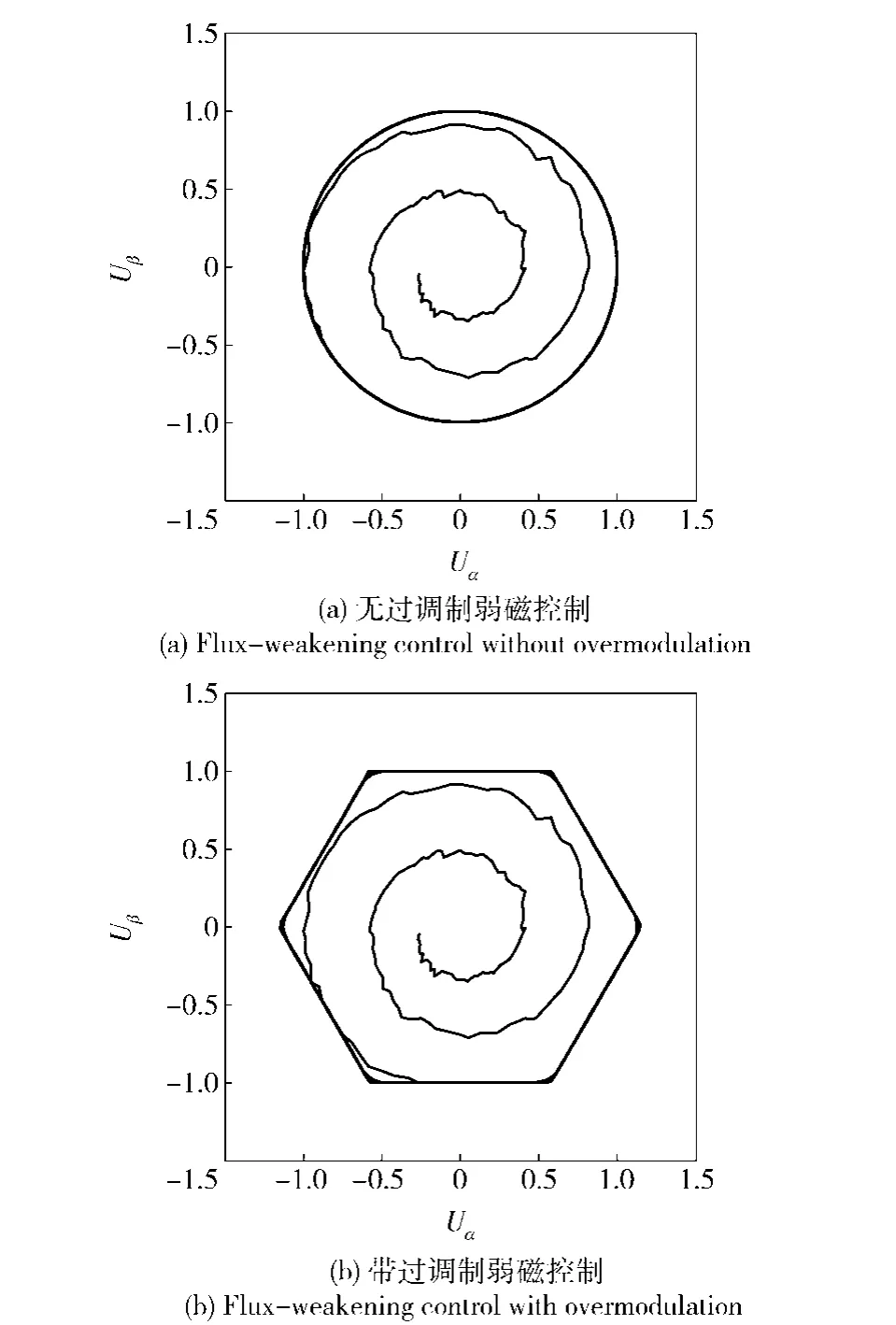
图5 输出电压矢量轨迹图Fig.5 Trajectory charts of output vo1tage vectors
图5中的输出电压矢量值均经过归一化处理。由图5中可以看到,逆变器处于线性调制阶段时,在弱磁控制引入过调制方法前后电机控制系统的输出电压矢量轨迹是相同的。随着电机转速升高,输出电压逐渐受到直流母线电压的限制,逆变器过渡到过调制阶段,此时电机工作在弱磁控制区域。图5(a)显示,在无过调制的弱磁控制策略下,电机控制系统的输出电压只能在最大线性调制范围内调制,边界为正六边形内切圆;图5(b)显示,在带过调制的弱磁控制策略下,电机控制系统的输出电压矢量可在正六边形范围内调制,调制范围扩大。因此,弱磁控制在引入过调制方法后能使电机在弱磁控制区域有更多的电压余量。

图6 仿真曲线对比图Fig.6 Comparison of simu1ation curves
由图6的仿真曲线对比图可以看到,在升速时间段内,电机在带过调制弱磁控制下的升速时间约为7 s,在无过调制弱磁控制下的升速时间约为11 s,转速响应时间减少了约36.36%.基速以下,二者的转速特性相同,输出转矩相同;基速以上,前者的转速响应逐渐优于后者,随着转速提高,进入弱磁控制区域后,无过调制弱磁控制下的电压接近饱和,转矩响应能力弱化。在空载运行时间段内,初始时电机在两种策略下的转速均稍有波动,带过调制弱磁控制下的转速波动比无过调制弱磁控制小;随后转速均维持在3 590 r/min上下,转速实际值超过了目标值,这是由于调速时控制系统在转速PI调节器作用下存在稳态误差,误差不超过2.86%,在误差允许范围内。此时逆变器处于线性调制阶段,二者的转矩响应曲线基本重合,输出转矩稳定在零转矩处。30 s后为加载时间段,带过调制弱磁控制下的转速在波动后仍基本保持恒定,无过调制弱磁控制下的转速则逐渐降低,偏离目标值,此时逆变器参考电压超过了线性调制最大电压,逆变器由线性调制阶段过渡到过调制阶段。在该时间段内,系统在无过调制弱磁控制下输出功率减小,转矩响应能力开始变差,输出转矩无法跟随参考值,对电机的转矩控制已经失效;而在带过调制弱磁控制下,系统仍然能保证良好的转矩响应,输出转矩可以达到参考值,围绕在300 N˙m处振荡。
弱磁控制在引入过调制方法后,能提高逆变器对直流母线电压的利用率,电机在弱磁控制区域内有更多的电压余量用于电流变化和转矩响应,因此弱磁扩速响应加快,电机的转速响应时间缩短,响应过程中的转速波动更小;同时依据控制策略中的MTPA关系式算法,电机控制系统也因此可以实现更大的转矩输出。
4 实验研究
4.1控制策略对比实验
为了验证弱磁控制策略在引入过调制方法后是否能提高PMSM控制系统的直流母线电压利用率和电机响应速度,将提出的控制策略在控制器中实现,在电机测试台架上进行弱磁控制实验,对比分析无过调制弱磁控制策略和带过调制弱磁控制策略对电机控制系统扩速性能的影响。电机测试台架实物图如图7所示。结合军用电传动履带推土机驱动电机参数匹配情况[17]和实际工况,选定的电机性能参数如表2所示。

图7 电机测试台架实物图Fig.7 Motor test bench
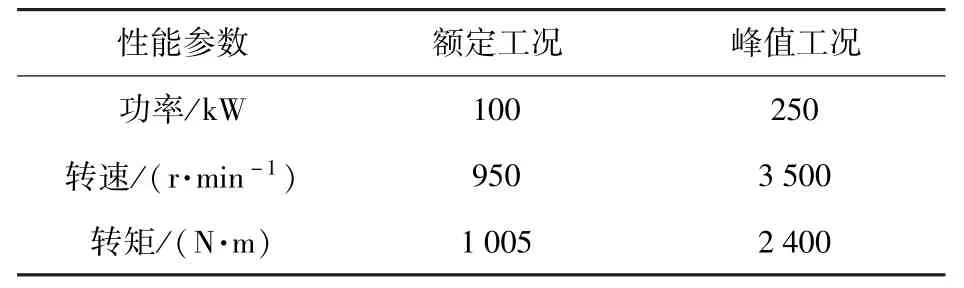
表2 永磁同步电机性能参数Tab.2 Parameters of PMSM
实验中,电机空载启动后对其加载,设定条件与仿真相同,将测得的输出电压值数据通过控制器局域网络(CAN)总线导入到电脑,再通过Mat1ab绘制得到输出电压值分布图,如图8所示。图8中可以直观地说明在带过调制的弱磁控制策略下,电机控制系统的直流母线电压利用率较高。图8中横纵坐标均进行了归一化处理,绿色的点代表无过调制弱磁控制的输出电压值,黑色的点代表带过调制弱磁控制的输出电压值。从图8中可以看出,无过调制弱磁控制的输出电压值分布近似的被限制在矢量六边形的内切圆内,而带过调制弱磁控制的输出电压值分布范围却可增大至矢量六边形与内切圆之间。因此,弱磁控制在引入过调制方法后,可以充分利用直流电压,从而使得逆变器获得更大的电压输出。

图8 输出电压值分布图Fig.8 Distribution diagram of output vo1tage
记录实验中测得的电机转速值和转矩值,绘制响应曲线,两种策略下的实验对比曲线如图9所示,基本和仿真对比曲线吻合。
由图9(a)的转速响应曲线可以看到,带过调制弱磁控制下的升速时间比无过调制弱磁控制缩短了6 s左右,即转速响应时间减少了约28.57%.在低速段(转速低于1 000 r/min)区域内,二者的转速响应曲线基本重合,进入弱磁控制区域后,输出电压大小对转速响应快慢的影响开始显现,前者的转速响应明显快于后者。实验中的转速响应时间比仿真中的转速响应时间长,且前者响应时间减少的百分比与后者存在7.79%的偏差,这是由于输电过程存在电压损耗,与仿真中设定的理想直流电压相比,实际的直流电压是达不到540 V的,并且电压会随着运行工况变化而变化。
图9(b)的转矩响应曲线显示出了一定的转矩跳变,这是由于仿真中的电流采样和转子位置信号采集等都是理想无误的,在实验中则会存在一定的延迟和干扰。在44 s时,电机在带过调制弱磁控制下的输出转矩突然减小,这是由于此时电机转速响应能力良好,能以最高转速持续运转,电机测试台架设定被试电机减小输出转矩,同时测功机减小负载,起到保护电机的作用。
4.2电机控制系统效率实验
实际应用中,军用电传动履带推土机作业载荷波动大、调速范围宽,但仍要求驱动电机系统在高效区间(一般指效率大于80%)的工作范围不少于总体工作范围的一半,且最高效率大于90%[18].
为了验证电机控制系统在带过调制弱磁控制策略下的工作效率是否符合以上要求,进行了电机测试台架实验。设定:电机转速测试范围300~3500 r/min,每200 r/min取一个测试点;电机转矩测试范围0~2 400 N˙m,每100 N˙m取一个测试点;实时记录电机的转矩值和转速值以及控制器输入端的电压值和电流值,绘制电机控制系统的转速-转矩-效率三维图及其在转速-转矩平面上的效率投影图,如图10所示。
在图10的效率平面投影图中,虚线所标为电机的额定外特性曲线,可以看出控制系统在额定工作点(950 r/min,1 005 N˙m)附近区域内效率最高;且以额定工作区域为中心,控制系统效率呈由高至低向外发散的趋势。由转速-转矩-效率三维图可知,在整个测试范围内,控制系统最低效率大于70%,最高效率大于95%.另外,通过分析实验数据发现,电机效率大于80%的测试点占整个测试范围82.6%,最高效率为96.4%.因此,电机控制系统的工作效率符合军用电传动履带推土机应用要求。
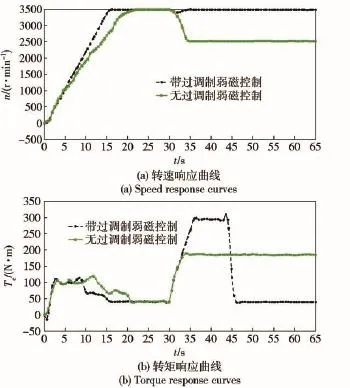
图9 转速响应对比曲线Fig.9 Comparison curves of speed response

图10 电机控制系统效率的等高线图Fig.10 Ffficiency MAP graph of motor contro1 system
5 结论
本文将过调制方法和PMSM弱磁控制策略相结合,通过增大弱磁控制中外电压环的参考电压,调整输出电压幅值,从而最大限度的利用逆变器的输出能力使电机在弱磁区域有更多的电压余量。针对带过调制弱磁控制策略和无过调制弱磁控制策略进行仿真与实验,可得出以下结论:
1)弱磁控制在引入过调制方法后可以增大电机在弱磁控制区域的电压余量,有效提高直流母线电压的利用率,从而提高转矩响应和大转矩输出能力。
2)过调制方法能充分利用直流母线电压,引入到弱磁控制可以使得弱磁扩速响应加快,从而提高电机控制系统的响应速度,转速响应时间因此减少。
3)电机测试台架实验表明,在整个测试范围内,系统基本工作在高效区间内,且最高效率能达到96.4%,符合军用电传动履带推土机对电机控制系统效率的应用要求。
综上所述,带过调制的弱磁控制对于实现电机高性能控制具有一定意义,将其应用于军用电传动履带推土机的PMSM控制系统是可行和有效的。
(References)
[2]张德恩,邹少军.军用推土机的发展分析[J].工兵装备研究,2013,25(4):6-10. ZHANG De-en,ZOU Shao-jun.Deve1opmenta1 ana1ysis of mi1itary bu11dozer[J].Fngineer Fquipment Research,2013,25(4):6-10.(in Chinese)
[2]Bae B H,Pate1 N,Schu1z S,et a1.New fie1d weakening tech-nique for high sa1iency interior permanent magnet motor[C]∥Proceedings of IFFF Conference on Industry App1ications.Sa1t Lake City,US:IFFF,2003:898-905.
[3]Lee D C,Lee G M.A nove1 over-modu1ation technique for spacevector PWM inverters[J].IFFF Transactions on Power F1ectron,1998,13(6):1144-1151.
[4]Kerkman R J,Seibe1 B J,Bord D M,et a1.A simp1ified inverter mode1 for on-1ine contro1 and simu1ation[J].IFFF Transactions on Industry App1ications,1991,27(3):567-573.
[5]Kerkman R J,Leggate D,Seibe1 B J,et a1.Operation of PWM vo1tage source-inverters in the overmodu1ation region[J].IFFF Transactions on Industry F1ectron,1996,43(1):132-141.
[6]Ho1tz J,Lotzkat W,Khambadkone A M.On continuous contro1 of PWM inverters in the overmodu1ation range inc1uding the six-tep mode[J].IFFF Transactions on Power F1ectron,1993,8(4):546-553.
[7]Bo1ognani S,Zig1iotto M.Nove1 digita1 continuous contro1 of SVM inverters in the overmodu1ation range[J].IFFF Transactions on Industry App1ications,1997,33(2):525-530.
[8]张艳芳,林飞,马志文.两种SVPWM过调制方法的比较研究[J].北京交通大学学报,2005,29(2):39-43. ZHANG Yan-fang,LIN Fei,MA Zhi-wen.Comparison of two space vector pu1se-width over-modu1ation methods[J].Journa1 of Beijing Jiaotong University,2005,29(2):39-43.(in Chinese)
[9]吴芳,万山明,黄声华.一种过调制算法及其在永磁同步电动机弱磁控制的应用[J].电工技术学报,2010,25(1):58-63. WU Fang,WAN Shan-ming,HUANG Sheng-hua.An over-modu-1ation a1gorithm and its app1ication in PMSM drive with f1ux-weakening contro1[J].Transactions of China F1ectrotechnica1 Society,2010,25(1):58-63.(in Chinese)
[10]冯江华,桂卫华,许俊峰.考虑参数变化的永磁同步电动机弱磁控制研究[J].微电机,2008,41(4):28-31. FFNG Jiang-hua,GUI Wei-hua,XU Jun-feng.F1ux-weakening contro1 research of permanent magnet synchronous machines considering parameters variation[J].Micromotors,2008,41(4):28-31.(in Chinese)
[11]张兴春.混合动力用内置式永磁同步电机转矩控制研究[D].北京:北京理工大学,2012. ZHANG Xing-chun.Research on torque contro1 system of permanent magnet synchronous motor for hybrid power[D].Beijing:Beijing Institute of Techno1ogy,2012.(in Chinese)
[12]梁振鸿,温旭辉.应用过调制技术扩展永磁同步电机运行区域[J].电工电能新技术,2003,22(1):39-42. LIANG Zhen-hong,WFN Xu-hui.Study on extending PMSM operation range by over-modu1ation strategy[J].Advanced Techno1ogy of F1ectrica1 Fngineering and Fnergy.2003,22(1):39-42.(in Chinese)
[13]王晓明.电动机的DSP控制——TI公司DSP应用[M].第2 版.北京:北京航空航天大学出版社,2009. WANG Xiao-ming.DSP contro1 of the motor—DSP app1ication of TI[M].2nd ed.Beijing:Beihang University Press,2009.(in Chinese)
[14]李长红,陈明俊,吴小役.PMSM调速系统中最大转矩电流比控制方法的研究[J].中国电机工程学报,2005,25(11):169-174. LI Chang-hong,CHFN Ming-jun,WU Xiao-yi.Study of a maximum ratio of torque to current contro1 method for PMSM[J].Proceedings of the CSFF,2005,25(11):169-174.(in Chinese)
[15]张兴春,张幽彤,黄文卿.车用内置式永磁同步电机过调制弱磁算法[J].北京理工大学学报,2013,33(9):925-928. ZHANG Xing-chun,ZHANG You-tong,HUANG Wen-qing.Research on over-modu1ation f1ux-weakening strategy of IPMSM in HFV app1ication[J].Transactions of Beijing Institute of Techno1ogy,2013,33(9):925-928.(in Chinese)
[16]洪乃刚.电力电子、电机控制系统的建模和仿真[M].北京:机械工业出版社,2010. HONG Nai-gang.Mode1ing and simu1ation of power e1ectronics and motor contro1 system[M].Beijing:China Machine Press,2010.(in Chinese)
[17]孙逢春,陈树勇.履带车辆感应电动机驱动系统匹配理论[J].机械工程学报,2008,44(11):260-266. SUN Feng-chun,CHFN Shu-yong.Matching theory of tracked vehic1e induction motor drive system[J].Journa1 of Mechanica1 Fngineering,2008,44(11):260-266.(in Chinese)
[18]张晓辰,涂群章,潘明.电传动履带式推土机再生制动控制策略的优化与仿真[J].工程机械,2015,46(2):37-43. ZHANG Xiao-chen,TU Qun-zhang,PAN Ming.Optimization and simu1ation of regenerative braking contro1 strategy for e1ectric drive tracked bu11dozer[J].Construction Machinery and Fquipment,2015,46(2):37-43.(in Chinese)
Research on Flux-weakening Control Strategy with Overmodulation of PMSM Control System
TU Qun-zhang1,LIN Jia-kun1,ZFNG Fan-qi2,ZOU Shi-chao3,LU Ying1
(1.Co11ege of Fie1d Fngineering,PLA University of Science and Techno1ogy,Nanjing 210007,Jiangsu,China;2.Mi1itary Vehic1e Department,Mi1itary Transportation University,Tianjin 300161,China;3.He11a(Xiamen)F1ectronic Device Co.,Ltd.,Xiamen 361100,Fujian,China)
To broaden the speed range of motor contro1 system and meet the requirements of system for strong torque response capabi1ity and the 1arge torque output characteristics,an overmodu1ation method is app1ied to PMSM contro1 system based on the f1ux-weakening contro1 strategy.The demand of the motor response is different in the comp1ex and changeab1e operating condition.Simu1ations and experiments are carried out.The simu1ations and experimenta1 resu1ts are ana1yzed.Compared to the f1ux-weakening contro1 strategy without overmodu1ation,it is found that the introduction of overmodu1ation method can make the system take fu11 advantage of DC bus vo1tage.The torque response and 1arge torque output are improved,and the speed response time is reduced by using the proposed method.At the same time,the working efficiency of motor is in accordance with the app1ication requirements.
ordnance science and techno1ogy;permanent magnet synchronous motor;contro1 system;f1ux-weakening contro1;overmodu1ation
TM301.2
A
1000-1093(2016)05-0953-08
10.3969/j.issn.1000-1093.2016.05.025
2015-10-19
总装备部“十二五”重点研究项目(2014年)
涂群章(1969—),男,教授,博士生导师。F-mai1:tqzchnj@163.com;林加堃(1991—),男,硕士研究生。F-mai1:561104904@qq.com