机载光阵探头探测期间云粒子的破碎
2016-10-13黄敏松雷恒池陈家田张晓庆
黄敏松 雷恒池 陈家田 张晓庆
机载光阵探头探测期间云粒子的破碎
黄敏松1, 2雷恒池1, 3陈家田1张晓庆1
1中国科学院大气物理研究所云降水物理与强风暴重点实验室,北京100029,2中国科学院大学, 北京100049,3南京信息工程大学气象灾害预报预警与评估协同创新中心,南京210044
机载光阵探头探测时,云粒子(液态和固态)进入二维光阵探头的采样区前,会因与探头探测臂发生机械碰撞,或者与探头外壳产生的湍流和风切变相互作用而破碎。破碎程度与粒子类型、大小、粒子密度、探头入口设计以及飞行空速等有关。利用2008年7~9月探测飞机(Y-12)在山西省太原地区的航测资料并对飞机采样期间的云粒子破碎现象进行介绍和分析,分析结果表明,粒子到达时间间隔分布具有双模态特征:长时间模态是粒子空间分布的真实结构,短时间模态则是云粒子破碎的结果。提出用粒子到达时间间隔阈值作为粒子破碎的判定标准,给出适用于2008年太原地区航测资料的粒子破碎识别阈值,其中适合于探头云粒子成像仪(CIP)的阈值是2×10−5s ,而探头降水粒子成像仪(PIP)的阈值是1×10−4s。所提的阈值对于以Y-12为机载探测平台,以CIP和PIP探头为探测仪器所获取的其它航次云微物理图像资料的粒子破碎处理也是有一定的参考使用价值。
机载探测 光阵探头 粒子破碎
1 引言
自从粒子测量系统(PMS)于20世纪70年代问世以来(Knollenberg, 1970, 1981),其已被广泛地应用于地面和空中测量,以辅助云降水物理研究和卫星遥感订正等。在测量过程中,尤其在机载飞行条件下,云粒子(液态和固态)进入二维探头的采样区前,会因与探头臂发生机械碰撞,或者与探头外壳产生的湍流和风切变相互作用而破碎。一个云粒子可破碎为几个甚至几百个碎片,导致多计小云粒子数目,少计大的云粒子(Korolev and Isaac, 2005)。因此,过去的30多年里有相当多的科学家对PMS粒子测量系统数据采集过程中的粒子破碎现象进行了研究并给出了一些比较可行和有效的处理方法。Cooper(1978)对光电阵列探头探测数据进行了分析,给出了一个用于二维光阵探头探测数据中去除破碎粒子的方法,他认为如果粒子图像的到达时间间隔所对应的空间距离小于2.5 cm,则第2个粒子应该被视为粒子碎片予以去除。在Cooper(1978)工作的基础上,Heymsfield and Baumgardner(1985)提出了基于到达时间间隔的破碎粒子滤除算法。Korolev and Isaac(2005)对粒子破碎效应进行研究后指出,粒子破碎程度与粒子类型、大小、粒子密度、探头入口设计以及飞行空速等有关。云粒子破碎可以影响从二维探头测量结果计算得到的云粒子浓度、含水量、雷达反射率等。Field et al.(2006)分析了光电阵列探测仪所测粒子到达时间间隔的双模态结构,认为长时间模态代表着真实云结构而短时间模态则代表着破碎的冰粒子,对四次航测资料中的三个航次资料处理分析,他采用2×10−4s作为粒子破碎的判断阈值,剩下的一个航次资料则采用1×10−5s作为粒子破碎的判断阈值。Korolev et al.(2011, 2013)利用标准结构的探头和改进结构的探头进行飞行探测实验对比,结合Field et al.(2006)提出的破碎粒子滤除算法对粒子破碎的成因及其影响进行初步的量化分析。由于机载测量中粒子破碎不仅和粒子自身有关,还和测量仪器以及机载平台有关,因此国内利用Y-12飞机进行机载探测时粒子破碎现象必然和国外不同类型飞机探测时粒子破碎现象存在差异,国外研究中所提的粒子破碎判断阈值也不能直接运用到国内的探测资料研究中。但国内目前并未对粒子破碎进行任何相关研究,因此很有必要利用国内云微物理飞机探测资料进行粒子破碎的研究,以提出适合国内探测资料破碎粒子剔除的方法。本文介绍我们的云粒子破碎处理分析思路和方法,给出适合2008年山西太原飞行探测资料的粒子破碎阈值以及利用该阈值进行资料处理所获取的一些结果。
2 二维光阵探头
PMS粒子测量系统的二维光阵探头主要有云粒子图像探头(OAP-2DC)和降水粒子图像探头(OAP-2DP)。现在国内的探测飞机(主要是Y-12)上面均装载了该类型探头的升级版,即由美国粒子测量技术公司(DMT)所改进的仪器云粒子成像仪(CIP)和降水粒子成像仪(PIP)。这两个成像仪器均属于成像阵列探测仪,具有相同的工作原理。当一个粒子经过由一激光光束所照明的采样空间时,其影子就会投射到一个线性光电二极管阵列上面。如果光电二极管所接收到的背景照明激光光强因粒子遮挡被削弱超过50%,则认为该光电二极管被遮挡了。光电二极管的状态由仪器的电子电路以与空气速度成正比的时钟频率进行扫描而获取,因此每扫描一次,就会生成粒子图像的一条线(slice),将一个粒子图像的多条线合并一块,最终会形成一幅二进制的粒子影子数字图像,其中1表示未受遮挡的像素,0表示遮挡的像素。沿着光电二极管阵列(方向)的仪器像素精度由仪器的光学放大倍数所决定,而与光电二极管阵列相垂直方向的像素精度(例如,与气流流向平行,方向)则由时钟频率和空气速度所决定。对于CIP和PIP而言,经过适当的频率设置后,和方向的像素精度是一致的,分别为25 μm和100 μm。CIP和PIP的线性光电二极管阵列均含有64个光电二极管,其测量范围分别是25~1550 μm(CIP)和100~6200 μm(PIP)。两仪器的采样面积位于仪器俩延伸臂之间分别为155 mm2和1550 mm2。两臂距离分别是100 mm(CIP)和250 mm(PIP)。
文中数据来自2008年7~9月山西人影办探测飞机Y-12在太原地区的全部航测 [其中,除20080705(2008年7月5日,为表示日期与航次方便,简写为20080705,下同)、20080714和20080717有CIP和PIP资料外,其余航次只有PIP资料] 结果。利用自主开发的云降水粒子图像数据处理软件对文中数据进行分析,该软件可获取CIP和PIP探头图像数据中的粒子大小、粒子的到达时间、粒径分布等重要的粒子信息。
3 云粒子到达时间间隔
航测时,云粒子一旦进入仪器采样区,仪器就会自动记录下此时粒子的到达时刻,如果对前后两个粒子到达仪器采样区的时刻值作差,所得差值我们称之为“云粒子到达时间间隔”。对某一航次或某段时间内探测到的云粒子到达时间间隔进行统计,则可获得该时间段内的云粒子到达时间间隔频率分布状况。
结合粒子图像数据,统计了2008年7~9月山西太原Y-12上CIP和PIP探头的航测资料,其中统计了CIP在7月份航测中8个时间段的资料,PIP则是7~9月中27个时间段的资料,这里取其中一个时长为2400 s的统计结果进行作图分析,如图1所示。图1a、b是相应时间段内云粒子的到达时间间隔散点图,横坐标表示粒子序数,纵坐标表示每个粒子所对应的时间间隔;图1c、d是上部时间段内云粒子到达时间间隔的出现频率(阶梯折线,实线是其最佳拟合曲线),横坐标表示粒子时间间隔的统计量,纵坐标表示相应时间间隔内出现的粒子数占该时段内粒子总数的比值。从图1可看出,不论是散点图还是阶梯折线图,CIP数据和PIP数据均呈现出双模态特征,但CIP数据的双模态分布更为明显。

图1 20080705航次粒子到达时间间隔及其频率分布:(a、c)CIP数据;(b、d)PIP数据。图中时间为北京时间
对上述CIP8个时间段资料和PIP27个时间段的模态峰值进行统计列表,结果如表1和表2所示,其中表1为CIP探头数据8个时间段的统计结果,表2为PIP探头数据27个时间段的统计结果。从表1和表2中可看出,CIP统计资料中有5个时间段粒子到达时间间隔分布呈双模态;PIP有6个双模态,即使在共同的时间段内(7月份的6个时间段),CIP有3个时间段内呈现双模态特征,而PIP仅有1次出现双模态特征。可见CIP探头出现双模态的概率要比PIP探头高许多,这个主要是由仪器的分辨率以及结构所决定的。此外,PIP探头的长时间模态峰值变化较大,PIP:长时间模态峰值为8×10−5s~8×100s之间,相差5个数量级,短时间模态峰值为8×10−6s~1×10−4s,近一个数量级;CIP:长时间模态峰值9×10−4s~1×100s,近3个数量级,短时间模态峰值1×10−6s~2×10−5s,一个多数量级。长短时间模态不同变化反映出它们之间物理学上差异。长时间模态峰值变化大,正好反映云微物理特征,同一块云的不同部位云粒子浓度是不同的,云与云之间的浓度差异就更大了。短时间模态峰值变化小则是另外一种物理机制(Field et al.,2003,2006)所致——云粒子破碎。

表1 云粒子到达时间间隔分布的峰值统计(CIP)
4 云粒子的破碎
在飞行测量过程中,云粒子与OAP探头的探测臂等之间会发生碰撞,或者与探测臂等周围产生的空气动力,如湍流、切变力等相互作用而破碎 (Korolev and Isaac,2005)。云粒子破碎除了和空速以及OAP探头的机械结构有关外,还和云粒子自身的物理结构相关,这里利用2008年山西太原Y-12航测的图像资料分别对冰雪晶粒子、霰粒子和液滴的破碎进行分析并提出适合粒子破碎剔除的方法。
4.1 光阵探头采样时云粒子破碎
光阵探头机载测量时云粒子破碎情况如图2所示,图2a是PIP探头在20080705航次探测中所测量到的冰雪晶粒子破碎现象,图2b是CIP探头在20080705航次探测中所测量到的冰晶粒子破碎现象,从图2a和b中均可看出一个冰粒子破碎后会产生大小和分布不同的粒子群。粒子群中的碎片数少则几十、多则几百,碎片的大小可以超越仪器的精度和量程范围。图2c、d则是PIP探头在20080705航次探测中所测量到的霰粒子破碎现象,霰粒子的破碎多半是与探头臂发生机械碰撞才能产生,而诸如探头外壳产生的湍流和风切变等空气动力学力不易使其破碎,从图2c、d中可看出霰粒子破碎后也能形成大小和数量不一的粒子群。图2e、f是PIP探头在20080714航次探测中所测量到的液相粒子破碎现象。造成液态滴破碎的原因,除机械碰撞破碎外,空气动力学力的作用也是一个重要原因。从图2e、f中可看出测量过程中液滴因碰撞变形破碎,也可看到在空气动力学力作用下发生的部分破碎和完全破碎等情况,因此液滴破碎状况比固相粒子要复杂些。但不论粒子相态如何,也不论粒子破碎成因,从图2中可看出粒子破碎总是形成一簇在空间中分布紧密的碎片粒子群,碎片之间的间隔和旁边未破碎的粒子之间的间隔相比要紧密许多,从时间尺度来看就是碎片的到达时间间隔要短于未破碎粒子的到达时间间隔,而且会形成双峰的模态结构。因此,如果碎片的到达时间间隔和未破碎粒子的到达时间间隔在频率分布上能够无重叠地分开,则可以采用到达时间间隔作为粒子破碎事件的判断标记。
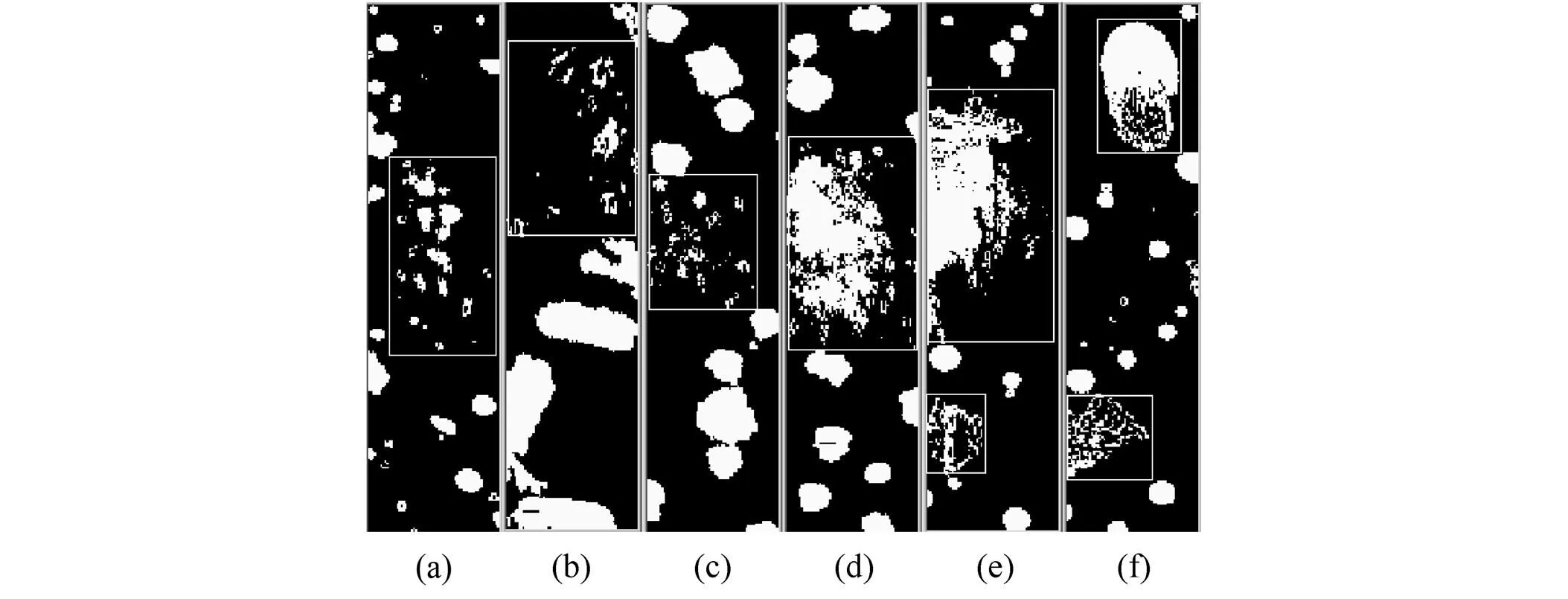
图2 机载探头测量中的粒子破碎现象:(a、b)冰雪晶粒子破碎;(c、d)霰粒子破碎;(e、f)液滴破碎
4.2 云粒子破碎判据
通常航测的一幅图像由自然粒子(为与破碎粒子相区别,我们定义未破碎粒子为自然粒子,其中包括破碎粒子的母体)和破碎粒子组成。一般情况下,经过探头采样区的每个自然粒子均会被仪器所记录并给以标记。一个云粒子破碎,可以产生许多个破碎的小粒子,当这些破碎粒子经过采样区时,有些会被仪器一个一个记录下来,从而形成许多帧图像;而有些破碎粒子因其分布比较密集,粒子之间的距离小于采样频率所对应的空间距离时则一起被仪器以一个粒子形式记录下来,这时在一帧图像内会包括几个甚至几十上百个破碎粒子。而一帧内所含的粒子数除了和破碎的物理机制有关外,还和仪器的分辨率相关。因为粒子的碎片大小一旦小于仪器分辨率,即使其落入仪器采样区内也无法由仪器所记录。因此,仪器的分辨率越高,其往往会记录下更多的小碎片数目。
对于云粒子破碎现象的识别,人眼判断带有主观性,而且由于粒子图像数量巨大,用人眼识别难以完成,因此必须找到一种客观且能对大量资料进行自动处理的方法,以替代人眼的工作。由于粒子破碎后破碎粒子的到达时间间隔要短于自然粒子的到达时间间隔,因此可对粒子到达采样区的时间进行分析,得到比较准确的数学判据,并对所给判据进行实际应用。
上节对粒子到达时间间隔统计发现,粒子到达时间间隔分布具有明显的双模态特征,而且结合具体的粒子图像数据,可以确定,粒子到达时间间隔分布的长时间模态反映的是云中粒子真实的分 布状况,短时间模态则是由粒子破碎的事件引起的。因此可以利用粒子到达时间间隔作为粒子破碎的判据。Field et al.(2003, 2006)和Korolev et al.(2011, 2013)等均利用两个模态连接处的最小值作为破碎粒子识别的判据。考虑到长时间模态和短时间模态之间连接区域必有破碎粒子和自然粒子在到达时间间隔上的重叠,为了尽量减少将自然粒子误判为破碎粒子,选择短模峰值作为破碎粒子识别判据。同时,为了尽可能多将破碎粒子识别出来并考虑到所选判据的普适性,选择统计表中短模峰值的最大值作为最终的破碎粒子识别判据。因此,分析表1和表2中的短时间模态。CIP和PIP短模态峰值范围分别是1×10−6~2×10−5秒和8× 10−6~1×10−4秒。将短模峰值范围的最大值2×10−5秒和1×10−4秒分别作为CIP和PIP探头的粒子破碎阈值,当某一粒子的到达时间间隔小于等于该阈值时,连同其前一个粒子一起被认定为破碎粒子。
4.3 云粒子破碎判据的应用
4.3.1 云粒子破碎对测量的影响
根据粒子图像资料,利用云粒子破碎时间阈值判据,即云粒子到达时间间隔T≤0.1 ms(PIP)和0.02 ms(CIP),对2008年山西太原的航测资料进行分析,并对与破碎相关的参量进行统计,表3和表4给出每次航测的一些时间段有关粒子破碎参数的统计结果。表中第一行符号意义如下:y和h两列数字分别为左侧时间段内粒子破碎进行订正前后粒子尺度第一通道(CIP:25 μm;PIP:100 μm)粒子累计数。ps表示单个自然粒子破碎成粒子帧数范围,t表示相应时间段内总的粒子帧数,p则表示该时间段内因破碎形成的粒子帧数,p/t则表示该时间段内破碎形成的粒子帧数与总的粒子帧数比值,也称“破碎效率”(Korolev and Isaac,2005)。由于8月13日起没有CIP探头的有效数据,因此统计参数表格按照仪器分类进行统计。

表3 粒子破碎有关参数统计结果 (CIP)
(1)单个粒子破碎形成的碎片数量(ps)
每个粒子破碎后都能产生多个碎片(帧),对于同一个探头CIP或者PIP,由于航速、风速以及探头与风向夹角等因素的差别,使得粒子与探头支撑臂碰撞破碎后产生的碎片个数和大小都有很大的差异。因此,表3和表4中ps可达几十个。破碎形成碎片数的多少和大小还与采样探头结构有很大关系。对比分析表3和表4(20080705~20080717)的单个粒子破碎形成的碎片数(ps),CIP测量中产生的碎片数明显高于PIP,这与两者的碰撞条件差异有关,同时也与仪器的结构和分辨率大小有关。单从表4的ps数据来看,ps数最大值变动范围较大,最大可达到60个,这个主要和测量环境有关。
(2)破碎粒子对测量粒子谱的贡献
图3a、b分别给出CIP和PIP探头在20080705、20080714、20080717三个航次所测量破碎粒子出现次数(p)及其与原始粒子出现次数(y)比值的尺度分布统计平均结果。图中虚线表示破碎粒子出现次数均值的尺度分布,实线表示p与y比值均值的尺度分布。由图3a、b可见CIP 和PIP资料的统计结果均显示破碎粒子出现次数的尺度分布呈现指数分布,而且覆盖整个测量范围。但是破碎形成小尺度粒子占绝大多数,这与Korolev et al.(2011,2013)的统计结果是一致的,从图3a、b的p/y的尺度分布曲线看出,破碎粒子对粒子尺度分布的两端贡献较大。

图3 20080705、20080714和20080717三个航次测量中破碎粒子均值的尺度分布及其与原始粒子比值均值的尺度分布:(a)CIP探头数据的统计结果;(b)PIP探头数据的统计结果
(3)破碎粒子总数p对测量粒子总数t的贡献
从表3和表4中可以看出,p/t的比值变化范围较大,CIP:4.5~42.9,数值大于10的有5个,占5/8;PIP:数值范围2.9~36.7,10以上有17个,占17/26,破碎形成的粒子帧数占总的粒子帧数超过10%的在所选取的探测数据段内均超过了50%。Korolev and Isaac(2005)在分析粒子破碎时发现枝状冰晶的破碎效率均在10%以上,而在分析到达时间间隔算法有效性时Korolev et al.(2013)发现CIP的破碎效率达到了43%。
4.3.2 粒子形状对粒子破碎的影响
利用云粒子破碎时间阈值判据,对PIP探头所测得的霰粒子和大粒子(主要是不规则形状的冰雪晶粒子)的破碎现象进行研究,分析粒子形状对粒子破碎的影响。所用霰粒子资料取自20080705航次时间09:40:11~09:47:16(北京时间,下同;PIP),共7分15秒;大粒子资料取自20080714航次时间10:41:01~10:41:30(PIP),共30秒测量记录。
图4给出了大粒子和霰粒子的一个粒子破碎后产生的帧数及其出现频率。从图中可以看到,大粒子和霰粒子破碎后产生的总帧数不超过20,但出现频率较高的是生成帧数在2~6之间,而其中以形成2个粒子帧的出现频率最高。

图4 PIP探头中大粒子和霰粒子破碎后产生的帧数与出现频率
对PIP测量中两种粒子破碎效率进行统计分析,结果如表5所示。从表中可看出大粒子的破碎效率大于霰粒子,接近2倍的关系,也就是在测量过程中PIP更容易受到大粒子破碎的影响。由于所选的大粒子主要是辐枝状聚合物,因此从表中可以初步推断:与辐枝状聚合物相比,相同大小的霰粒子的破碎效率较低。辐枝粒子之间的连接较弱,除碰撞破碎之外,探头臂周围产生的湍流扰动以及粒子在探头探测臂前的突然减速都可能造成粒子破碎;对于霰粒子而言,这些空气动力很难使其破碎,一般来说机械碰撞是霰粒子破碎主要因素。

表5 PIP粒子破碎程度统计
4.3.3 粒子相态对粒子破碎影响
选用CIP探头所测得的粒子资料研究粒子相态对粒子破碎的影响。固相粒子(以冰晶为例)数据选自20080705航次09:30:46~09:32:46两分钟长度数据,液相粒子(以液滴为例)数据选自20080714航次10:15:00~10:20:00五分钟长度数据。
图5是不同相态粒子破碎后产生的粒子帧数与其出现频率的关系。除每个破碎粒子破碎成2帧为最高出现频率外,就是破碎帧数范围很大,两个例子都展示出能够破碎成20帧以上。这一点与PIP固态粒子情况有很大差别。而且从图5还可看出液相粒子破碎后形成的粒子帧数要大于固相粒子破碎后形成的粒子帧数。

图5 CIP探头中冰晶粒子与液滴破碎后形成的粒子帧数及其频率分布
同样利用粒子破碎效率的概念,对两种不同相态的粒子在CIP测量期间的破碎程度进行比较,具体如表6所示。从表6中可以看出无论是液相粒子还是固相粒子,和PIP的破碎程度相比(表5),在CIP测量期间都有比较大的破碎效率39.27%(固相粒子)和45.85%(液相粒子),尤其是液相粒子的破碎程度更加严重。当然CIP的破碎程度更重说明了“云”探头CIP和“雨”探头PIP相比,更易受到粒子破碎的影响,这和Korolev and Isaac(2005)的分析结果也是一致的。

表6 CIP粒子破碎程度统计
4.3.4 粒子谱数据的订正
利用到达时间间隔阈值对航测图像资料中的破碎粒子进行识别和剔除,这里选取20080705航次09:40:11~09:47:16时段探头CIP和PIP所探测的资料进行破碎粒子的剔除,以获取订正后的粒子谱数据。订正前(实线)和订正后(虚线)的两个探头粒子谱如图6所示。从图中可以看出,粒子破碎对小粒子谱的贡献比较大,运用到达时间间隔阈值的方法可以很好地把破碎粒子和自然粒子分开。此外,从图中还可以看出运用到达时间间隔阈值方法对CIP粒子谱的改善比对PIP粒子谱的改善比较大,这也说明了粒子破碎对CIP的影响比对PIP的影响更大。

图6 20080705航测时段利用到达时间间隔阈值对探头所测粒子数据进行订正前后对比,图中纵坐标中F(D)表示粒子谱,:(a)CIP;(b)PIP
5 讨论
(1)云粒子到达时间间隔分布的双模态分布
粒子到达时间间隔分布曲线呈现双模态分布特征:长时间模态和短时间模态。长时间模态体现了云中真实的微物理结构,是自然云粒子之间距离的反映,是云内粒子数密度不同造成的;短时间模态是云粒子破碎的结果。短时间模态峰值比长时间模态的峰值小3~5个数量级,这是由粒子破碎后形成的特有分布特征所决定的。粒子破碎形成破碎碎片,成片、密集地分散于空中,数密度远大于云中自然粒子的数密度,相邻碎片之间的距离也短于自然状态下相邻粒子之间的距离。因此,碎片的到达时间间隔必然短于自然粒子的到达时间间隔,时间分布状态图上就呈现出双模态特征。
长时间模态峰值变化大和短时间模态峰值变化小是破碎粒子双模态分布的另一个特征。前者反映云中粒子空间分布变化大,即云粒子数密度变化大,是自然现象。后者是粒子破碎机理所决定的。
粒子到达时间间隔的双峰现象,主要取决于有否粒子破碎。但是,并不是只要存在粒子破碎就会有双峰出现。例如,表2 PIP 20080705航次中09:20:31~09:53:55(2004 s)时间只有长时间模态峰值,没有显示出短时间模态峰值,但是在09:40:11~09:47:16(425 s)时间段,出现明显的短时间模态峰值,这个和所测时间段内的自然云粒子分布状态有关,如果所测的时间段内自然云粒子分布相对较密时则可能将短时间模态和长时间模态平滑上升连接起来,这样就只有长时间模态而没有明显的短时间模态。
(2)不同仪器对粒子破碎的影响
表1和表2的统计分析结果以及对粒子谱数据的订正均表明,“云”探头CIP在测量过程中受粒子破碎的影响要远大于“雨”探头PIP。这里除了因为CIP探头的分辨精度比较高,能看到更多破碎后的细小粒子外,还跟探头的结构有很大关系。CIP探头前端的两根向前延伸的探测臂是垂直向前,长度比较短,同时两臂之间的距离也比较短。PIP探头前端的两根向前延伸的探测臂是斜侧着向前延伸,长度也比较长,采样区内两臂之间的距离也比较大。PIP探头更宽大的采样视场空间导致其对粒子产生的气动压迫效应要远小于CIP探头对粒子的气动效应。因此改进OAP探头的机械设计是很有必要的。
(3)粒子形状和相态对自身破碎的影响
表5和表6分别表明粒子破碎和粒子自身的形状与相态有很大的关系。不同相态的粒子中,液相粒子的破碎效率要高于固相粒子。而同为固相粒子,辐枝状聚合物的破碎效率却高于霰粒子。破碎效率不同表明粒子自身的物理结构对粒子破碎有很大的影响。不同的物理结构导致粒子破碎的难易程度不同以及破碎时形成的碎片数也不同。此外,不同物理结构的粒子所受的破碎机理也可能是不同的。
(4)云粒子破碎机制
航测时,对云粒子采样期间,有时云粒子会产生破碎,原因有二:“静止”的云粒子与采样探头的探测臂等之间发生碰撞,或者与支撑臂等周围产生空气动力,如湍流、切变力等相互作用,[见Korolev and Isaac(2005)的图16]任何云粒子在被采样期间的撞击破碎,会由于其与碰撞物之间的相对角度不同,使得破碎效率和破碎程度可能有所不同。
对于液态粒子而言,除了跟固态粒子一样,在“碰撞冲击力”作用下可以产生破碎外,有时液态粒子会在采样区内产生变形,或变形加上另一种破碎,这不能完全用“撞击力”来解释。这可能是在探测臂周围存在某种空气动力,如湍流、切变力等,在液态滴与这些力之间位置等适当条件下,产生此种现象。有时较大尺度辐枝状聚合物,由于聚合单体之间的连接较弱,也可能在这些力的作用下变形甚至破碎。
(5)破碎粒子的识别以及识别算法的有效性
粒子破碎后产生的破碎粒子群对云粒子结构、粒子谱的确定有一定的影响,应该从资料中将它们剔出。在处理软件中加入粒子破碎判据,对于两帧或两帧以上连续到达时间间隔T≤2×10−5s(CIP探头资料)或者T≤1×10−4s(PIP探头资料),加上它们前面通过时间较长的一帧,共同组成破碎粒子群,一并予以剔除。采用这种方法能够识别出绝大部分的破碎粒子。由于到达时间间隔算法的有效性依赖于一个粒子破碎事件中至少要有两个碎片粒子被记录下来,因此,当一个粒子破碎事件仅有一个碎片被记录下来或者整个破碎事件中进入仪器采样区中的碎片被仪器以一个粒子图象帧记录下来,这时到达时间间隔算法是无效的。此外,在高密度场合,自然状态下的两个粒子以及枝状粒子部分进入仪器采样区或者偏焦导致一个粒子分为两部分等则有可能被算法误判为破碎的粒子碎片。而当一个碎片被弹射到一个自然粒子边上时到达时间间隔算法在识别出破碎的碎片时也会将自然粒子误判为破碎粒子。由于粒子破碎过程的随机性和自然云粒子形态的多样性,以及二维成像探头有限的成像精度和灰度等级,再加上每次航测所得的粒子数很多,对到达时间间隔方法的破碎粒子识别率还无法进行准确确认。
在这里我们依靠仪器所记录的粒子图像,忽略掉仅一个破碎碎片被记录下来的情形,以“到达时间间隔”方法识别出的破碎粒子数为总基数,利用人眼对20080705航次的到达时间间隔算法的识别结果进行验证,并定义:
错误识别率=错误识别的粒子数/总的粒子数,(1)
准确识别率=准确识别的粒子数/总的粒子数,(2)
其中,总的粒子数为到达时间间隔方法识别出的总破碎粒子数;错误识别的粒子数为到达时间间隔方法识别出的破碎粒子数中的非破碎粒子数,识别方法为人眼判断;准确识别的粒子数为到达时间间隔方法识别出的破碎粒子数中真实破碎碎片数,识别方法为人眼判断。
算法从CIP和PIP探头资料中识别出的破碎粒子总数分别是3719个和2801个,其中被误判为破碎粒子的数目分别是597和317,分别占到了识别数的 16.1%和11.3%,准确的识别率分别是83.9%和88.7%。Korolev et al.(2013)经过实验对比指出到达时间间隔算法无法完全滤除粒径小于500 μm以下的碎片粒子,该算法的有效性取决于仪器的分辨率和电子系统的响应时间。到达时间间隔算法的准确识别率除了和仪器相关外,还和飞行测量时的具体情况相关,比如自然云内的粒子数浓度等,但综合起来考虑,到达时间间隔方法能将绝大部分的破碎粒子碎片识别出来,而且和经过结构改进的探头实际飞行实验数据对比(Korolev et al.,2013)也表明该方法是比较有效的,因此保守估计的话80%以上的准确率是没问题的。因此单纯的到达时间间隔算法是无法完全识别出所有的破碎碎片,减少探测资料中碎片伪迹的途径需从仪器本身和算法完善两方面入手。
(6)所提阈值的适用性
粒子破碎除了和粒子本身物理结构有关,还和飞机的飞行速度、飞机和仪器的外形结构以及仪器挂载的位置等有关。本文所提出的阈值是从对山西Y-12探测飞机于2008年在太原航测资料的统计分析中获取的,在统计过程中不考虑粒子的晶型和具体的大气环境条件。因此利用此阈值对山西Y-12探测飞机在其它年份探测的资料进行处理分析也是适用的。此外,目前国内的云物理探测飞机主要是国产的Y-12飞机,飞机的改装和仪器的挂载位置基本一样,因此所提阈值对于国内以Y-12飞机为机载平台,以CIP和PIP探头为探测仪器,这样组合所获取的云物理探测图像资料的处理分析也是有一定的参考使用价值。
6 总结
通过对2008年7月到9月太原地区飞行航测的云粒子图像资料分析,我们得到如下结果:
(1)云粒子通过探头采样区时到达时间间隔T的出现频率呈现双模态形式,长时间模态表示真实云结构,短时间模态是粒子破碎的结果。长时间模态峰值变化较大,短时间模态峰值变化较小。云粒子到达时间间隔T双模态形式的出现频率还表明CIP探头比PIP探头对云粒子破碎影响更严重。
(2)OAP探头对云粒子采样期间,有时云粒子会产生破碎,原因有二:“静止”的云粒子与探头的探测臂等之间发生碰撞,或者与探测臂等周围产生空气动力,如湍流、切变力等相互作用。粒子破碎程度不同,有的完全破碎,有的部分破碎,有的破碎成数量大、尺度小的粒子帧,有的破碎成数量小但尺度大的粒子帧;液态滴除破碎外还可能变形,有时伴随部分破碎,等等。
(3)2008年7~9月所有航次随机时间段内破碎粒子总数与测量粒子总数之比的数值范围较大(CIP:4.5%~42.9%;PIP:2.9%~36.7%),反映了破碎的真实状况;云粒子破碎形成的破碎粒子覆盖整个测量尺度,改变了粒子谱分布。因此有必要滤除碎片伪迹。
(4)对于2008年山西Y-12飞机的航测资料,CIP探头以粒子到达时间间隔≤2×10−5s,PIP探头以粒子到达时间间隔≤1×10−4s作为云粒子破碎的判据进行处理是比较准确可靠的。
致谢 感谢山西省人影办提供了2008年的太原航测资料,感谢中国科学院大气物理研究所沈志来老师对本文方法研究中给予的帮助和指导。
(References)
Cooper W A. 1978. Cloud physics investigations by the University of Wyoming in HIPLEX 1977 [R]. Bureau of Reclamation Rep. No. AS119, Laramie, WY: Dept. of Atmospheric Science, University of Wyoming.
Field P R, Heymsfield A J, Bansemer A. 2006. Shattering and particle interarrival times measured by optical array probes in ice clouds [J]. J. Atmos. Oceanic Technol., 23: 1357–1371, doi:10.1175/JTECH1922.1.
Field P R, Wood R, Brown P R A, et al. 2003. Ice particle interarrival times measured with a fast FSSP [J]. J. Atmos. Oceanic Technol., 20: 249–261, doi:10.1175/1520-0426(2003)020<0249:IPITMW>2.0.CO;2.
Heymsfield A J, Baumgardner D. 1985. Summary of a workshop on processing 2-D probe data [J]. Bull. Amer. Meteor. Soc., 66: 437–440.
Knollenberg R G. 1970. The optical array: An alternative to scattering or extinction for airborne particle size determination [J]. J. Appl. Meteor., 9: 86–103, doi:10.1175/1520-0450(1970)009<0086:TOAAAT>2.0.CO;2.
Knollenberg R G. 1981. Techniques for probing cloud microstructure [M]// Hobbs P. Clouds: Their Formation, Optical Properties and Effects. London: Academic Press, 15–91, doi:10.1016/B978-0-12-350720-4. 50007-7.
Korolev A, Isaac G A. 2005. Shattering during sampling by OAPs and HVPS. Part I: Snow particles [J]. J. Atmos. Oceanic Technol., 22: 528– 542, doi:10.1175/JTECH1720.1.
Korolev A V, Emery E F, Strapp J W, et al. 2011. Small ice particles in tropospheric clouds: Fact or artifact? Airborne icing instrumentation evaluation experiment [J]. Bull. Amer. Meteor. Soc., 92: 967–973, doi:10.1175/2010BAMS3141.1.
Korolev A V, Emery E F, Strapp J W, et al. 2013. Quantification of the effects of shattering on airborne ice particle measurements [J]. J. Atmos. Oceanic Technol., 30: 2527–2553, doi:10.1175/JTECH-D-13-00115.1.
Cloud Particle Shattering during Sampling by Airborne Optical Array Probes
HUANG Minsong1, 2, LEI Hengchi1, 3, CHEN Jiatian1, and ZHANG Xiaoqing1
1,,100029,2,100049,3,,210044
During sampling by airborne optical array probes, cloud particles (droplets or ice crystals) will shatter before entering into the sampling area, either by mechanical impaction with the instrument arms or by interaction with turbulence and wind shear generated by the probe housing. The shattering efficiency depends on the habit, size, and density of particles, as well as the probe inlet design, and airspeed. The phenomenon of cloud particle shattering during airborne sampling is presented in this paper. The data analyzed were from the flights of the Shanxi Y-12 research plane in the Taiyuan area from July to September 2008. It is shown that the distribution characteristics of inter-arrival times of particles can be bimodal: the long-term mode reflects the true structure of cloud particles distributed in space, and the short-term mode is the result of cloud particle shattering. An inter-arrival time threshold is proposed as a criterion for particle shattering identification. For the data analyzed in this study, the value was 2×10−5s and 10−4s for Cloud Imaging Probe (CIP) and Precipitation Imaging Probe (PIP), respectively. These values might also serve as reference thresholds for data from other Y-12 research plane flights.
Airborne observation, Optical array probe, Particle shattering
10.3878/j.issn.1006-9895.1505.15106.
1006-9895(2016)03-0647-10
P426.5+1
A
10.3878/j.issn.1006-9895.1505.15106
2015-01-12;网络预出版日期 2015-05-19
黄敏松,男,1983年出生,工程师,在职博士研究生,主要从事云降水物理、大气探测研究。E-mail: mission@mail.iap.ac.cn
国家重大科研仪器设备研制专项 41327803
Founded by the National Major Program for Scientific Reasearch Instrument Development of China (Grant 41327803)
黄敏松,雷恒池,陈家田,等. 2016. 机载光阵探头探测期间云粒子的破碎 [J]. 大气科学, 40 (3): 647−656. Huang Minsong, Lei Hengchi, Chen Jiatian, et al. 2016. Cloud particle shattering during sampling by airborne optical array probes [J]. Chinese Journal of Atmospheric Sciences (in Chinese), 40 (3): 647−656,