基于TMS320F28335的永磁同步电动机控制器的设计
2016-10-13李玉峰郭群赵鑫1
李玉峰,郭群,赵鑫1,
(1.沈阳航空航天大学,辽宁省通用航空重点实验室,沈阳110136;2.沈阳航空航天大学电子信息工程学院,沈阳110136)
基于TMS320F28335的永磁同步电动机控制器的设计
李玉峰1,2*,郭群2,赵鑫1,2
(1.沈阳航空航天大学,辽宁省通用航空重点实验室,沈阳110136;2.沈阳航空航天大学电子信息工程学院,沈阳110136)
针对永磁同步电机(PMSM)具有结构简单、效率高、功率因数高等优点,研究和设计了一款以浮点型TMS320F28335数字信号处理器(DSP)为控制核心的永磁同步电机控制器。该控制器设计了三相全控桥式功率驱动电路和过流、欠压检测,温度监控等检测保护电路,能通过CAN总线连接外部显示模块以及RS232通信接口与上位机的高速通信并进行实时数据交换,软件部分采用空间矢量算法实现电流、速度和位置的精确控制。实验结果表明,控制器精度高、响应快、控制效果稳定。
永磁同步电机;控制器;矢量控制;数字信号处理器
伴随着微型计算机技术、传感器技术以及电机控制理论的发展,永磁同步电机PMSM(Permanent Magnet Synchronous Motor)控制系统的研究和推广受到了人们的普遍重视[1-2]。永磁同步电机以其高精度、高可靠性以及宽调速范围等优点逐步成为工业控制领域中一种常用的伺服电机[3-5]。
在系统设计过程中,高性能永磁同步电机伺服控制系统的设计关系整个控制系统性能的优劣。本研究在分析PMSM数学模型和矢量控制理论[6-8]的基础上,设计了一款以32 bit浮点型DSP TMS320F28335芯片为控制核心的控制器。该控制器芯片与传统定点型DSP(如TMS320F2812等)相比,能够执行更复杂的浮点运算,可以节省代码的执行时间和存储空间,A/D转换更精确快速等。
1 总体方案设计
电机控制器以DSP TMS320F28335为核心,外围由电源模块、IGBT驱动电路[9-10]、霍尔传感器接口、信号检测电路[11]、开关量输入输出电路、模拟量输入输出电路、232/CAN通信电路等组成。如图1所示为电机控制器整体结构。控制器根据霍尔传感器反馈信号完成转子的定位和测速,可以通过232通信接口接收来自上位机的控制指令,通过CAN通信接口[12]连接下位机的显示系统,达到硬件实时监控的目的。控制器内部采用PID控制算法调解输出PWM信号占空比完成转速的闭环控制,通过故障与保护电路对整个系统进行软件的实时控制。
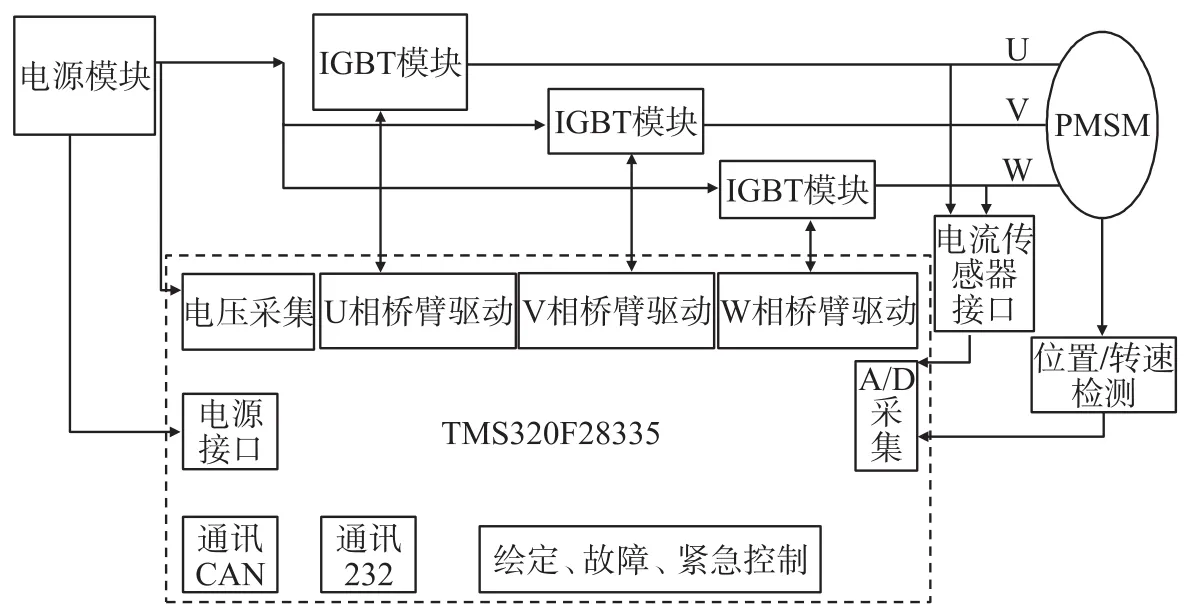
图1 电机控制器整体结构
2 控制器关键电路设计
2.2IGBT驱动电路设计
IGBT驱动器选用CONCEPT研发的驱动器模块。其基本框图如图2所示,该驱动器包含最优化且可安全驱动的IGBT模块所必须的所有元件及功能,使开关损耗最小的门极电阻、门极钳位,有源钳位二极管(关断时的过压保护),Vce检测(短路保护),以及输入电器连接器X1;电器连接X2接上热敏电阻可以有效的对温度进行监控。甚至,还包含了半桥模式下,设置关断跳闸电位,响应时间和两个通道之间死区时间的元件。
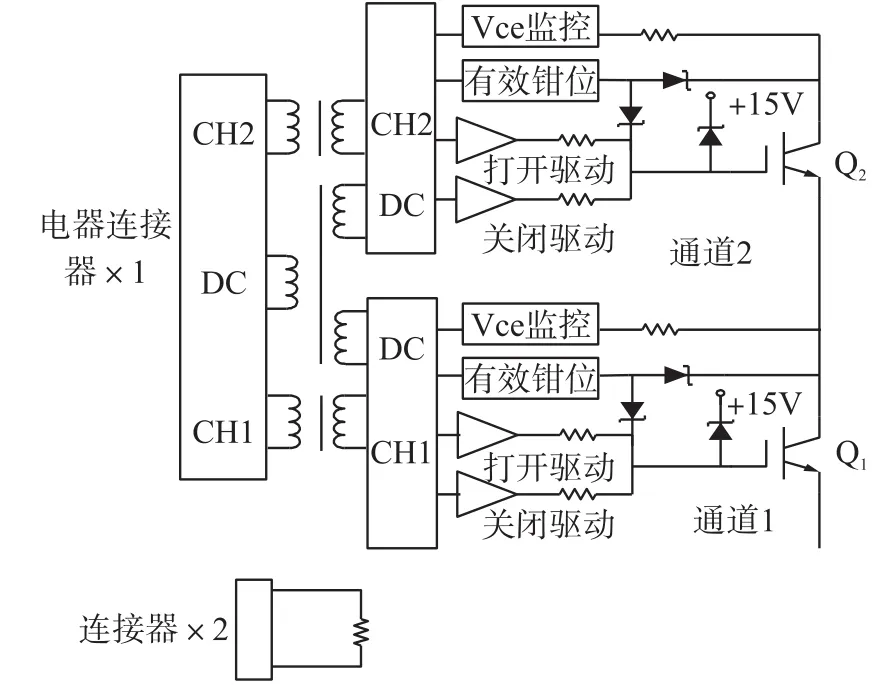
图2 IGBT驱动器原理图
2.3信号检测电路设计
2.3.1母线电压检测电路
母线电压检测电路如图3所示,通过电源模块获得母线电压BUS+,将其分压通过电容去除交流分量得到母线直流电压,3 V稳压管起到过压保护作用;5 V的输入电压和高输入阻抗的光隔离放大器非常适合电机驱动的隔离电压要求,使用电阻式分压电路来调解母线直流电压以适应电压传感器的输入范围,并在光隔离屏障的另一端产生正比于输入电压的差分输出电压。由于ADC单元不能处理差模信号,需将其转换成共模信号,电阻R1起到过流保护作用,DB300用于保护DSP的ADC模块的输入端。
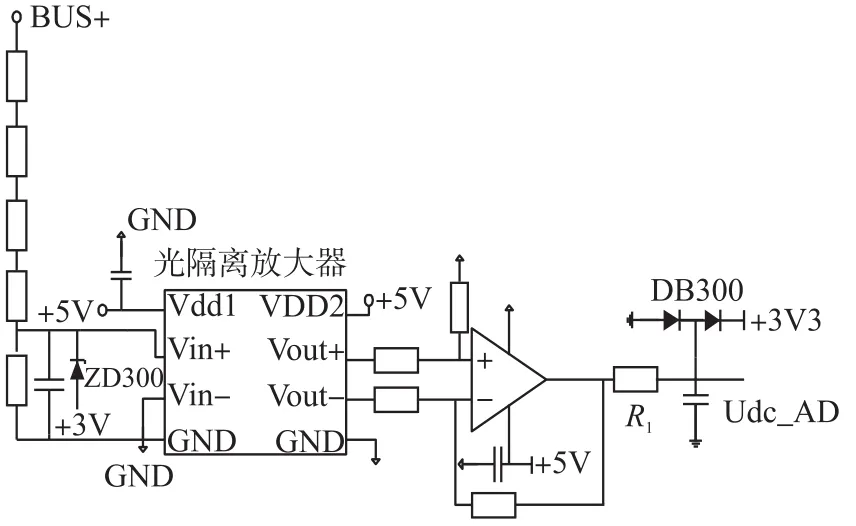
图3 母线电压检测电路
2.3.2电流检测电路
控制器通过电流传感器获得电机的三相电流,他们需要经过隔离和保护后才能够被ADC单元处理。其U相电流检测电路如图4所示,首先将电流信号转换为电压信号,再通过分压与滤波调整为ADC模块的输入电压,最后通过运放保护、过流保护电阻R2以及过压保护DB301送入ADC单元。V相和W相电流也采用同样的方式进行检测。
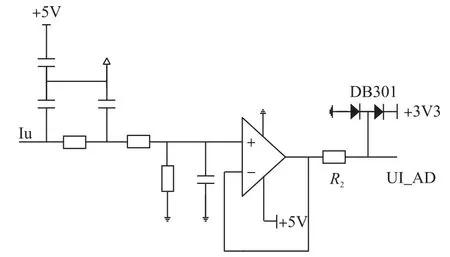
图4 U相电流检测电路
2.3CAN总线设计
TMS320F28335片内具有CAN控制模块,可以与CAN收发器连接构成一个CAN接口。在此之前加上一个双通道光电隔离器进行电路保护同时电平转换将5 V电压转换为3.3 V,如图5所示。当总线的通信速度比较高,或者传输距离较长时,为了保持其高频特性终端需要加上匹配电阻,如图5中的R3和R4。
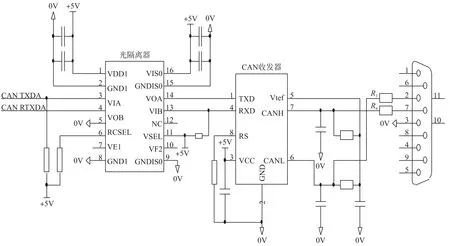
图5 CAN接口电路
3 控制器软件设计
基于SVPWM的PMSM转子磁场定向控制系统如图6所示。通过位置速度传感器(旋转变压器、霍尔传感器等)检测转子的位置和速度,并将其转换为电角度。给定转速nref和实际转速n的误差经速度调节器(速度环)调节,得到转子q轴电流的参考值isqref。定子相电流iA、iB通过电流传感器获得,经Clack变换将其转换到定子αβ坐标系,再经Park变换转换到dq旋转坐标系中。在dq坐标系上,isq和isd与对应的参考输入进行比较,通过电流调节器得到理想的控制参数,再经过Park逆变换将信号还原到静止坐标系αβ中。最后空间矢量脉宽调制(SVPWM)变换产生六路PWM脉宽调制信号给逆变器控制电机的运转。
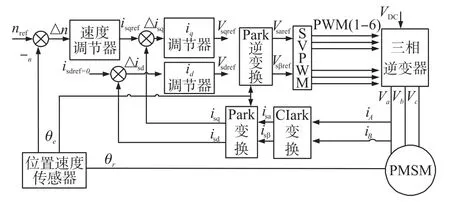
图6 基于SVPWM的PMSM转子磁场定向控制系统
控制器软件主要由主程序和若干子程序构成。主程序完成AD模块、I/O模块、PWM模块、CAP模块、CAN模块、外部中断模块等的初始化配置然后读取初始化变量最后进入状态机的主循环,主程序框图如图7所示。
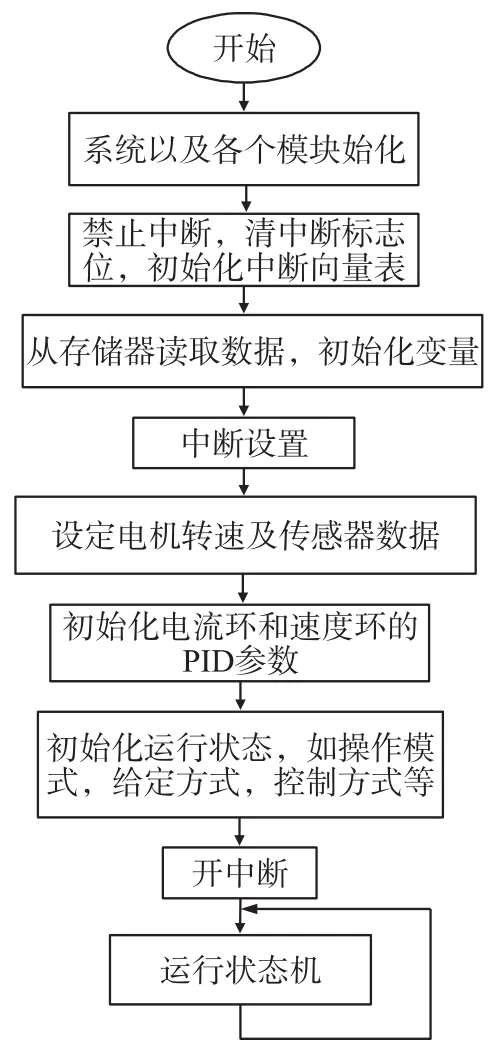
图7 主程序流程图
在中断服务子程序中完成FOC控制算法,其流程图如图8所示。FOC模块利用相电流反馈值与参考值进行电流环调解并输出SVPWM调制信号驱动功率管,从而控制电机按照命令执行相应的动作。
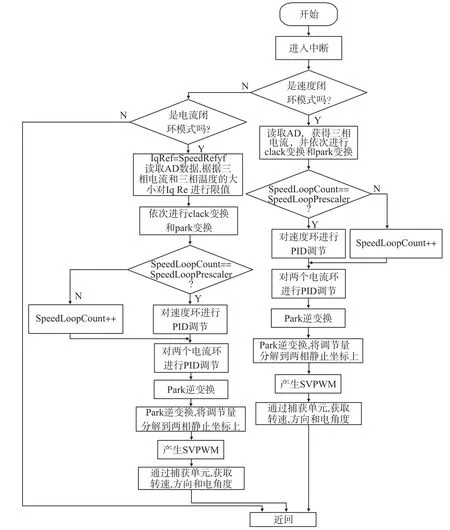
图8 FOC控制算法流程图
4 实验测试
永磁同步电机主要参数有:额定转速2 400 r/min,额定电压330 V,额定电流150 A,额定转矩160 N·m,磁极对数10个。为了验证该控制器的性能,对其进行了实验验证。驱动电机测试系统由电池组、测功机、功率分析仪、永磁同步电机以及永磁同步电机控制器组成。测功机电机为扭矩控制模式,被测控制器电机系统为速度控制模式,母线电压为直流330 V,简单风扇冷却(距离2 m吹风),室内温度20℃。
根据电机手册里介绍的能承受的各种指标,每增加200 r/min速度(直到增加到2000 r/min)下,额定扭矩(160 N·m)测量电机实际转速度、电机实际扭矩(如图9所示),直流母线电流、直流母线电压(如图10所示),A相母线电流、A相母线电压(如图11所示),系统功率(如图12所示)等试验数据。
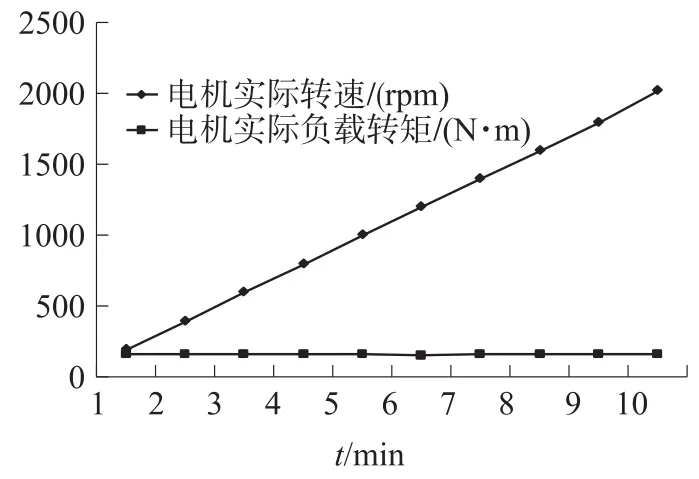
图9 电机实际转速、扭矩曲线
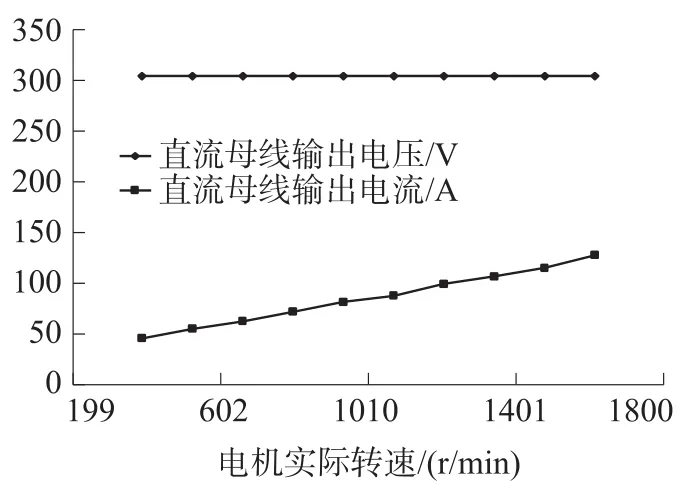
图10 直流母线输出电压、电流曲线
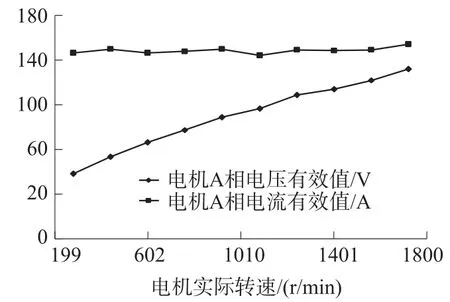
图11 电机A相电流、电压有效值曲线
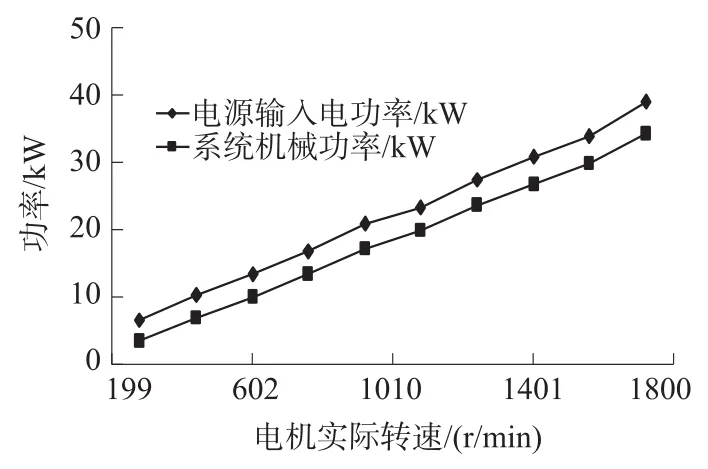
图12 电源输入电功率、系统机械功率曲线
由图9可知电机扭矩基本保持在160 N·m,电机转速每分钟增加200转;图10~图12表示分别为在相应转速下测得的直流母线输出电压、电流,电机A相电流、电压,电源输入功率和系统的机械功率。由实验结果可得:母线输出电压保持在330 V左右,其输出电流会随着转速的增加更增加;A相电流有效值大约为150 A,其电压有效值随着转速的增大而变大;电源输入电功率和系统机械功率都与转速成正比。
5 结论
本文介绍了以浮点型TMS320F28335数字信号处理器(DSP)为控制核心的永磁同步电机控制器的设计,给出了整个控制器以及不同子模块的设计方案。实验证明该控制器控制功能强、保护功能完善、工作性能稳定,拥有广泛的应用前景。
[1]李烨,严欣平.永磁同步电动机伺服系统研究现状及应用前景[J].微电机,2001,34(4):30-33.
[2]王华,邹积浩.基于模糊逻辑的直线永磁同步电机直接推力控制[J].电子器件,2007,30(6):2280-2283.
[3]王宏,于泳,徐殿国.永磁同步电动机位置伺服系统[J].中国电机工程学报,2004,24(7):151-155.
[4]汪海波,周波,方斯琛.永磁同步电机调速系统的滑模控制[J].电工技术学报,2009,24(9):71-77.
[5]朱孝勇,李正明.基于DSP的PMSM模糊位置伺服系统的研究[J].江苏大学学报(自然科学版),2002,23(5):82-86.
[6]肖海峰,刘海龙,贺昱曜,等.基于电压空间矢量控制PMSM系统新型死区补偿方法[J].电工技术学报,2013,28(8):114-118.
[7]陈俊硕,刘景林,张颖.永磁同步电机新型矢量控制[J].西安电子科技大学学报,2014,41(4):179-184.
[8]陈荣.永磁同步电机控制系统[M].中国水利水电出版社,2009.
[9]冯志翔,谢家昊.高性能IGBT驱动电路的设计[J].机电信息,2014(18):147-148.
[10]刘牮,布晓萌,雷龙,等.一种IGBT全桥逆变驱动电路的设计[J].信息技术,2014(10):125-128.
[11]李明.截止型过流保护电路的设计[J].煤矿开采,2011,16 (4):93-94.
[12]孟祥志,孙晓山,边敦新,等.电动客车整车控制器CAN接口设计[J].自动化应用,2013(8):28-29.125-128.
[13]胡金海,钱坤,谢寿生,等.基于CAN总线的航空发动机智能执行机构的设计[J].传感技术学报,2006,19(6):2617-2620.

李玉峰(1969-),男,汉族,吉林省德惠市人,沈阳航空航天大学电子信息工程学院院长,教授,硕士研究生导师,主要研究领域为航空电子信息技术,li_yufeng@126.com;

郭群(1990-),男,汉族,辽宁省沈阳人,沈阳航空航天大学电子信息工程学院在读硕士研究生,主要研究领域为航空电子信息技术,839818778@qq.com;

赵鑫(1977-),男,满族,辽宁省沈阳市人,沈阳航空航天大学电子信息工程学院讲师,主要研究方向控制理论与控制工程和信号处理,819049887@qq.com。
Design of controller for PMSM Based on TMS320F28335
LI Yufeng1,2*,GUO Qun2,ZHAO Xin1,2
(1.Liaoning Key Laboratory of General Aviation,Shenyang Aerospace University,Shenyang 110136,China;2.College of Electronic and Information Engineering,Shenyang Aerospace University,Shenyang 110136,China)
According to the simple structure,high-efficiency and high power factor of permanent magnet synchro⁃nous motor(PMSM),a controller for permanent magnet synchronous motor based on float-point digital signal proces⁃sor(DSP)TMS320F28335 was researched and designed.The controller contains three-phase full-bridge driving cir⁃cuit,over current sampling circuit and under voltage sampling circuit,temperature sampling circuit and so on.It can connect to the external display module by CAN bus and has capability of high-speed communication with the host via by RS232 interface and real-time data exchange.In software part,space vector algorithm is adopted to pre⁃cise control of current,speed and position.The experimental results show that the controller has the characteristics of high precision,fast response and the stability of the control effect.
permanent magnet synchronous motor;controller;vector control;digital signal processor
TM341
A
1005-9490(2016)02-0437-05
EEACC:8310D10.3969/j.issn.1005-9490.2016.02.038
2015-05-19修改日期:2015-06-26
