基于双闭环控制的风帆控制系统设计
2016-10-13湖南铁道职业技术学院陈新喜
湖南铁道职业技术学院 刘 彤 陈新喜
基于双闭环控制的风帆控制系统设计
湖南铁道职业技术学院 刘 彤 陈新喜
本文构建了以单片机为核心,PWM驱动直流电机,角度传感器测量角度,增量PID调节PWM,风板角度的动态控制系统,提出转速和角度双闭环控制控制方法,给出了测量实验数据,满足了对风板角度控制的要求。
风板控制;单片机;双闭环控制;增量PID
0 引言
风板控制装置是2015年全国大学生电子设计大赛高职高专组控制类题目,与2011年的帆板控制题目相比,角度变成了双向控制,装置如图1所示。

图1
基本要求如下:
(1)预置风板控制角度(控制角度在45°~135°之间设定)。由起点开始启动装置,控制风板达到预置角度过渡程时间不大于 10s,控制角度误差不大于5°,在预置角度上的稳定停留时间为5s,误差不大于1s。动作完成后风板平稳停留在终点位置上。
(2)在45°~135°范围内预置两个角度值(Φ1 和Φ2)。由终点开始启动装置,在10s 内控制风板到达第一个预置角度上;然后到达第二个预置角度,在两个预置角度之间做3次摆动,摆动周期不大于5s,摆动幅角误差不大于5°,动作完成后风板平稳停留在起点位置上;
(3)显示风板设置的控制角度。风板从一个状态转变到另一个状态时应有明显的声光提示。
发挥部分要求增加重量为10g砝码,用小长金属夹整体夹在风板对应位置上,完成基本要求的功能。
本文根据题目要求,以单片机为核心,设计控制系统,完成对风板角度的控制。
1. 系统方案设计
分析题目可知,本题目通过控制两个风机的风量来控制风板,完成规定动作,涉及电机驱动、角度检测、闭环控制、AD 转换等单片机应用技术。系统由单片机控制电路、人机交互模块、风机驱动模块、角度检测模块、声光报警模块、系统电源6 大模块构成,系统框图如图2所示。
单片机控制电路作为系统核心,实现系统电路控制和功能控制[1];人机交互模块实现系统人机交互功能,包括LCD显示、按键检测等;风机驱动模块接受单片机指令,完成风板两侧直流风机的旋转驱动;角度检测模块对风板摆动角度进行检测,送给单片机;声光报警模块对系统功能做出声、光指示;系统电源向各个模块提供工作电源。

图2 风板控制系统结构框图

图3 系统控制电路原理图
2. 主要电路设计
2.1单片机控制电路
单片机控制电路以STC12C5A60S2为核心,扩展I2C总线存储芯片24C02,如图3所示。STC12C5A60S2单片机指令完全兼容51系列,速度快8-12倍。内部集成专用复位电路,2路PWM输出,8路高速10位A/D转换,适合电机控制,强干扰场合应用[2]。24C02内部具有256字节的数据存储空间,可以用来保存系统各种控制参数。
2.2电机驱动电路
电机驱动分别驱动风板两侧的的直流电机,接受单片机控制信号,采用光耦隔离。电机驱动采用两片LMD18200实现,LMD18200是专用于运动控制的H桥组件,连续输出电流达3A ,工作电压高达55V,具有温度报警和过热与短路保护功能。LMD18200与单片机通过光耦进行隔离,单片机只需要输出DIR方向信号和PWM信号,就可以驱动直流电机按照指定方向和转速旋转,同时,输出电机部分设计了保护电路和抗干扰电路,进一步保护驱动电路和器件。电路原理图如图4所示。

图4 直流电机驱动原理图
2.3角度检测电路
角度检测采用模拟角度传感器,需要进行模/数转换,再输入单片机。这里选用模拟传感器WDD35D4-5K ,线性度0.1%,电阻值为5K的电阻式角度传感器,精度高,线性度好,广泛应用在工业控制领域。A/D转换器采用AD8341,4通道A/D转换,转换速率大于100K,16位精度,SPI总线接口,电路原理图如图5所示[3]。
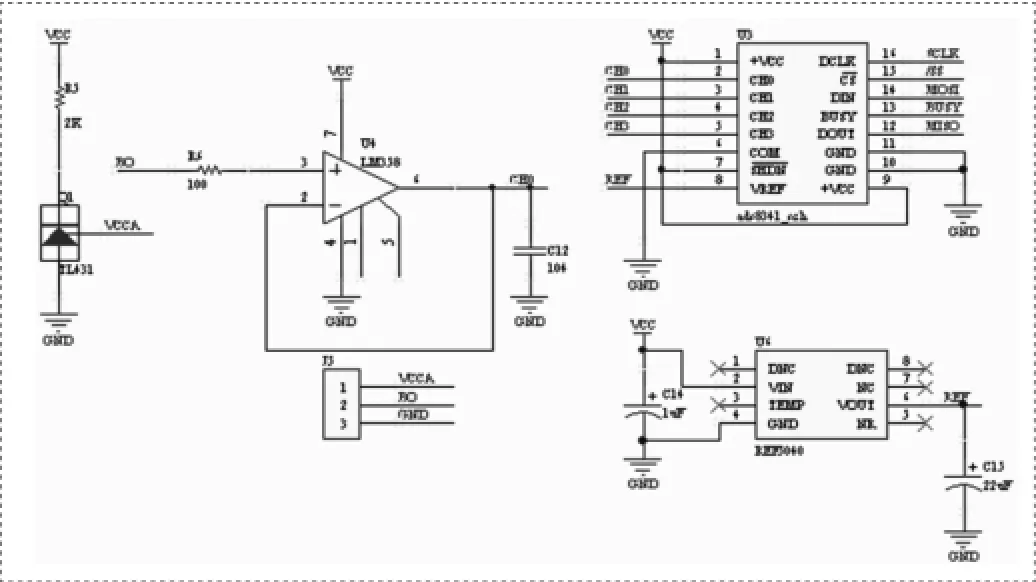
图5 角度测量电路原理图
传感器与风板同轴安装,角度变化,输出电压变化,经过运放LM358跟随输入A/D转换器AD8341,AD8341通过SPI接口送数据给单片机,完成角度测量。
3. 软件设计
系统功能主要是完成对风板角度的控制,利用单片机、PWM、电机、风板和传感器构成闭环控制系统,系统各个环节都可能产生干扰,是系统不稳定,所以,采用数字滤波增强抗干扰能力,双闭环控制增强系统稳定性。
3.1数字滤波
在系统控制过程中,传感器与风板同轴安装,各个测量环节硬件电路和机械结构都存在电磁、滤波、噪音的干扰,影响数据的准确性;结合软件数字滤波算法[4],可以增强系统的抗干扰性,提高采集数据的稳定性。数字滤波采用中位值平均滤波算法,由单片机对角度值采样12次,去除最大值、最小值,剩余取平均值,得到稳定的角度值。
3.2闭环控制
系统主要控制对象是角度控制,包含精度控制和稳定性控制两个方面。系统采用双闭环控制,内环是对电机转速的控制,因为不管是什么角度,最终反映到电机就是转速问题,决定风量的大小,同样环境下,转速稳定保证风量稳定,保证风板角度稳定,解决稳定性问题,另外速度环,还可以提高系统快速性。外环控制是角度控制[5],角度采集作为反馈量,经过数字增量PID调节,输出角度误差作为速度环的一个输入,与速度反馈叠加,调节PWM驱动的占空比,保证角度的准确性,如图6所示。
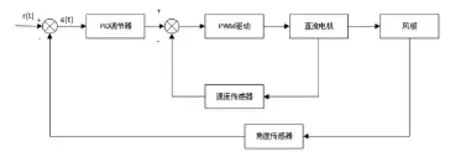
图6 系统闭环控制框图
4. 系统实验与测试
系统按照要求进行了基本功能测试和发挥功能测试,角度数据从45度~135度,测量角度和时间,基本功能不带砝码,发挥功能带10克砝码,测量数据如表1所示。

表1 系统测试数据
从测量数据可以看出,在不加砝码和加砝码两种情况都能够达到测量要求,无砝码时精度更高,稳定时间更短,加砝码时,增加了系统的不稳定性,精度满足要求,稳定时间变长。
5. 结论
本系统主要实现对风板角度的控制,采用了以单片机为核心的PWM驱动技术、数字增量PID调节技术,通过速度和角度双闭环控制,增加了系统的测量精度和稳定性,从测试数据可以看出,系统设计满足对角度控制的要求,运行可靠、稳定。
[1]陈桂友.增强型8051单片机实用开发技术[M].北京:北京航空航天大学出版社,2010.
[2]黄智伟.全国大学生电子设计竞赛训练教程[M].北京:电子工业出版社,2009.
[3]尹慧,詹新生.基于单片机控制的角度自动调整系统设计[J].电子设计工程,2012,20 (2).
[4]赵林,基于 STC12C5A60S2 的帆板控制系统设计[J].电子设计工程,2012,20(02).
[5]李莉,曹红英.基于单片机的风板控制装置设计与实现[J].工业控制计算机,2016,29(03).
Design of sailboard control system based on double closed control algorithm
Liu Tong, Chen Xin Xi
(Hunan Railway Professional Technology College,Zhuzhou 412001, China)
This article constructed the wind board Angle of dynamic control system with SCM as the core, the dc motor with PWM using incremental PID, the sensor of angle measurement and put forward the control method of the double closed loop with speed and Angle. The data of measurement experiment is given. The system meet angle control requirements of the wind board.
wind board control ;SCM;double closed loop control;incremental PID
刘彤(1972-),男,湖南株洲人,工学硕士,讲师,主要研究领域:控制理论与控制工程。
基金支持:2016年湖南铁道职业技术学院校级课题(课题编号:K201609)。
