移相全桥电路偏磁补偿的数字实现
2016-10-13孙得金洪捷李武杰
孙得金, 洪捷, 李武杰
(1.武汉征原电气有限公司,湖北 武汉 430012; 2.华中科技大学自动化学院,湖北 武汉 430074)
移相全桥电路偏磁补偿的数字实现
孙得金1, 洪捷1, 李武杰2
(1.武汉征原电气有限公司,湖北 武汉430012; 2.华中科技大学自动化学院,湖北 武汉430074)
提出一种有效的电流闭环偏磁补偿方案,通过检测变压器原边电流的峰值来判断移相全桥电路是否发生偏磁现象,并由PI控制器运算得到PWM信号的补偿值,从而达到补偿偏磁的效果,最后通过试验波形验证了补偿方案的可行性。
移相全桥电路;偏磁;电流闭环补偿;PI控制器;PWM信号
0 引 言
随着现代功率变换技术的飞速发展,对电源的重量、体积、可靠性和效率等提出了更高的要求。而应用于斩波电路的移相全桥 DC/DC 电路作为中大功率开关电源的首选拓扑电路,相比于传统的硬开关主电路拓扑,移相全桥变换器能够实现ZVS,控制容易,在功率变换的众多场合倍受欢迎[1]。移相全桥拓扑中存在三个值得研究的问题:滞后桥臂ZVS的实现、占空比丢失问题和偏磁问题。就偏磁问题而言,有许多论文给出了相应的解决方案,文献[2]采用在变压器初级加隔直电容,直流分量落在隔直电容上,在软件上不需要做任何处理就可以解决偏磁问题,实现简单,应用型强,但是引入隔直电容影响滞后桥臂ZVS的实现,并且降低了系统的效率。文献[3]采用UC3879,在硬件上实现偏磁补偿功能,实现方案复杂,可移植性差。文献[4]通过检测原边电流的直流分量来检测偏磁,但是变压器偏磁时原边电流的直流分量难以检测,这种方案不能可靠地检测到偏磁现象。本文基于对移相全桥电路偏磁现象的研究,提出了采用峰值电流检测的方案,并基于FPGA实现移相全桥DC/DC电路的控制。
1 偏磁现象产生的原理
移相全桥电路拓扑如图1所示。在图1中,偏磁是指加在高频变压器T原边两端的正反向脉冲电压的伏秒乘积不等,从而造成变压器磁芯的磁滞工作回线偏离坐标原点的现象。磁滞回线如图2所示,对于如图1所示的移相全桥电路而言,加在变压器原边两端的电压为交变的方波电压,如果方波电压的脉冲宽度相等,幅值也相等,磁芯工作点将沿着磁滞回线对称地往复移动,这种情况下不存在偏磁现象。但是当正负电压脉冲伏秒不相等时,假设正电压伏秒数大于负电压脉冲伏秒数,则B会超过-Bmax到+Bmax的区间,变压器铁心饱和,原边等效为一个较小的电感,变压器初级电流会剧烈增加,系统工作异常。

图1 移相全桥电路拓扑
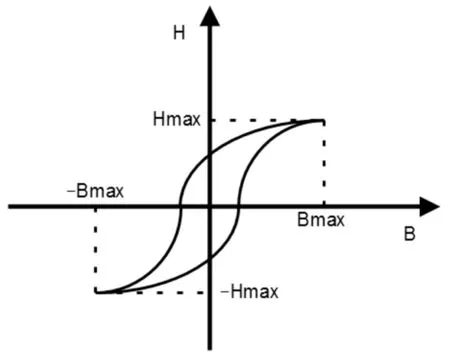
图2 磁滞回线
偏磁的产生有多种因素:(1) 开关管参数不一致。实际应用中同一桥臂上下两个开关管的参数,如通态压降、开通关断时间不同会引起变压器正负向电压的幅值或脉冲宽度不等。实际中,IGBT的通态压降相比于母线电压可以忽略,这个因素对偏磁的影响很小,但是IGBT的开通关断速度直接影响到脉冲宽度,是导致偏磁现象的一个重要原因。(2) 驱动板驱动信号传递时间有误差。实际应用中驱动电路参数不可能完全一致,导致脉冲宽度存在固定的误差。但是芯片传递信号的时间误差在纳秒级,对脉冲宽度的影响很小。(3) 控制系统的影响。在所设计的系统中采用光纤通信传递PWM信号,帧长度为10,速率为10 MHz,即控制板向驱动板送PWM信号的误差为1 μs,当开关频率不为2 μs的整数倍时,脉冲宽度存在最大1 μs的误差。由此可见,控制系统的影响可以在程序上消除,只要选择合适的开关频率即可。对于一个固定的系统而言,在系统稳定运行的过程中上述三个因素基本不会发生变化,所以需要补偿的偏磁参数最终是稳定不变的。
2 偏磁处理的数字方案
移相全桥电路正常工作时,分为六个状态[5-6]。
状态1:IGBT T1和T4导通,变压器原边回路为Udc-T1-T-T4,副边回路为D1-Lo-Co/RL-D4-T,有如下表达式:
(1)
(2)
联立式(1)和使(2)求得:
(3)
状态2:IGBT T2/D2和T4导通,变压器原边回路为D2/T2-T-T4,副边回路为D1-Lo-Co/RL-D4-T,有如下表达式:
(4)
(5)
联立式(4)和使(5)求得:
(6)
状态3:IGBT T2和T3/D3导通,变压器原边回路为Udc-D2-T-T3/D3,副边回路为D1-Lo-Co/RL-D4-T和D2-Lo-Co/RL-D3-T,有如下表达式:
(7)
us=0
(8)
联立式(7)和使(8)求得:
(9)
状态4~6与状态1~3类似,不再累赘。
变压器原边电流峰值为:
(10)
变压器发生偏磁时,原边电流波形会异常,最直观的现象表现在正负峰值电流上。由式(10)可以求得移相全桥电路正常工作时的峰值电流ipmax。如果驱动板上的FPGA检测到的电流正负峰值均接近ipmax,则没有发生偏磁;如果检测到正峰值接近ipmax而负峰值远大于ipmax,则FPGA输出向下偏磁信号;如果检测到负峰值接近ipmax而正峰值远大于ipmax,则FPGA输出向上偏磁信号,FPGA依据偏磁信号来实现偏磁补偿功能。
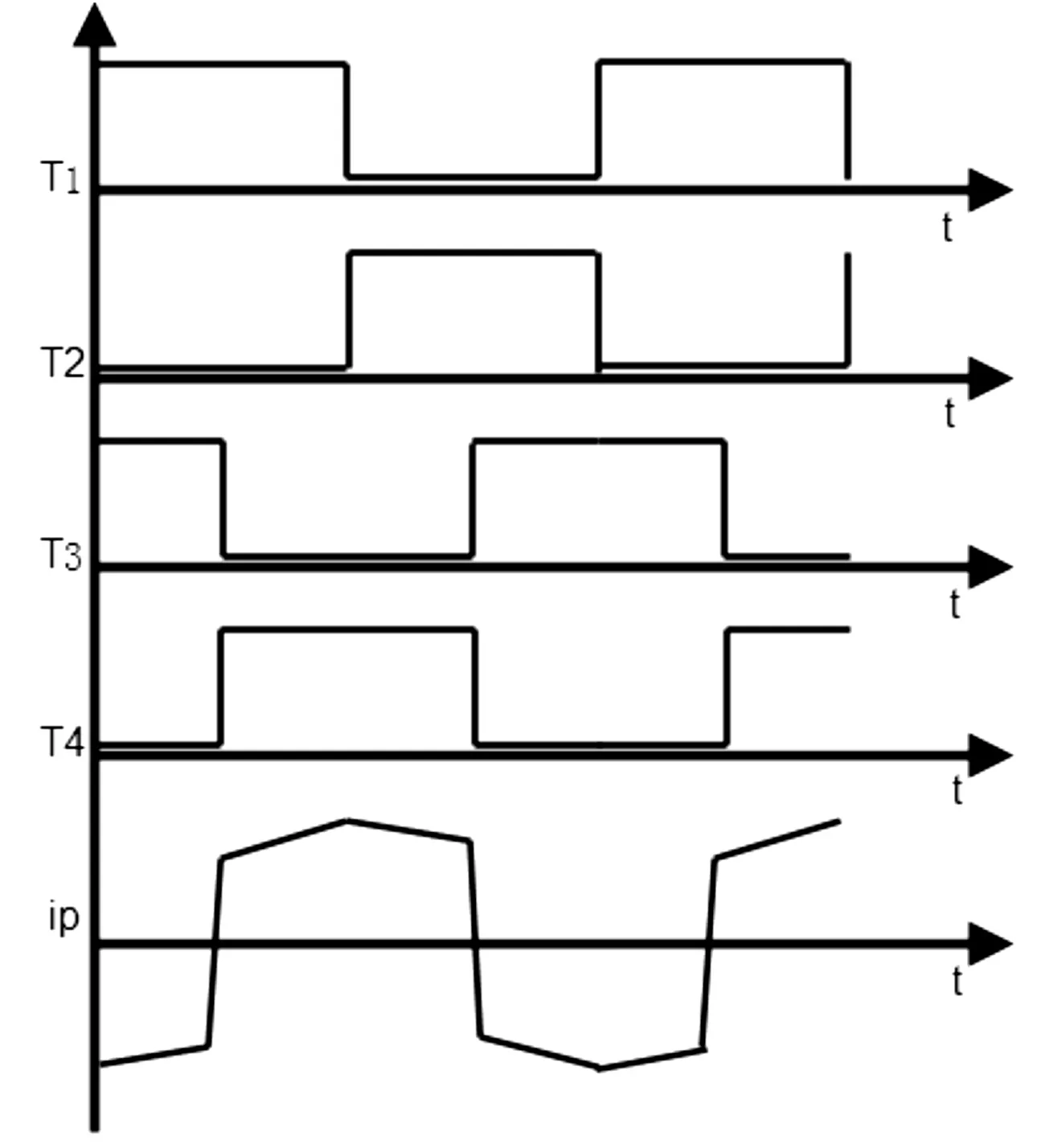
图3 移相全桥IGBT的驱动信号与原边电流波形
图3为IGBT的驱动信号与原边电流的波形图,忽略死区时间,正常时所有驱动信号的占空比为50%,T1和T2为超前桥臂,T3和T4为滞后桥臂。如果变压器向原边电流为正的方向偏磁,那么应该减小正电压脉冲宽度或者增加负电压脉冲宽度,反之则增大正电压脉冲宽度或者减小负电压脉冲宽度。在软件实现上无法实现PWM信号的超前,而只能实现PWM信号的延时,故只能采用增加正负脉冲的宽度来补偿偏磁。为了简化控制的复杂性,在不改变死区时间的前提下只在超前桥臂上进行补偿。如果变压器向原边电流为正的方向偏磁,那么T2的PWM信号延迟关断,反之T1的PWM信号延迟关断。信号延迟的时间即为偏磁补偿的时间,由PI控制器调节。
偏磁处理的数字方案在驱动板上的FPGA实现,程序框图如图4所示。变压器原边电流由电流传感器采集,经低通滤波器处理后进入A/D芯片,FPGA对A/D采样结果进行数字滤波,并选择出每个或每几个开关周期的正幅值P_ampl和负幅值N_ampl,设置比较窗口Loop。若P_ampl-N_ampl>Loop,则偏差输出为1;若N_ampl-P_ampl>Loop,则偏差输出为-1;否则偏差输出为0。偏差经PI运算后输出T1或者T2的PWM信号延迟时间,不断调节并最终消除偏磁现象。

图4 偏磁程序框图
3 试验结果
该控制策略已经成功应用于一台输入电压为500 V~900 V、输出电压为640 V和输出功率为30 kW的轻轨辅助逆变器上,主电路采用图1的拓扑结构,开关频率为8 kHz。控制板上DSP负责电压环的控制,驱动板上FPGA负责原边电流采样、偏磁检测和偏磁补偿。由于偏磁补偿程序并不改变死区时间,所以该偏磁补偿策略对滞后桥臂ZVS的实现没有影响。
试验波形中uo为输出电压,ip为变压器原边电流,t为时间。图5为输入电压600 V、输出电压600 V、负载22.5 kW、没有加偏磁补偿时的波形,图6为输入电压600 V、输出电压640 V、负载22.5 kW、没有加偏磁补偿时的局部波形图。图7为加入偏磁补偿时的波形。从试验波形中可以明显地观察到偏磁现象,电流峰值发生异常,但不存在明显的直流分量,这也是本文采用峰峰值电流检测的方案而不采用平均值电流检测方案的原因。没有加入偏磁补偿时,系统启动后存在持续的偏磁现象,而加入偏磁补偿后,原边电流会不断调节直至完全对称,即消除了偏磁。图8为额定负载条件下系统稳定运行波形,输入电压为750 V,输出电压为640 V,输出功率为30 kW,由图8知,进行变压器偏磁补偿后,变压器原边电流正负对称,变压器没有发生偏磁。

图5 输出功率为22.5 kW时无偏磁补偿波形图

图6 输出功率为22.5 kW时无偏磁补偿局部波形图

图7 输出功率为22.5 kW时偏磁补偿波形图

图8 输出功率为30 kW时系统稳定运行波形图
4 结束语
本文通过对偏磁现象的分析,采用峰值电流检测的方案检测偏磁,并通过PI控制器进行闭环补偿,由试验验证了这种方案的可行性。这种偏磁补偿方案具有闭环控制器的特点,能快速稳定补偿变压器的偏磁。
[1] 罗明. 移相全桥DC/DC变换器的研究[D].广州:华南理工大学,2010.
[2] 沈燕群,姚刚,何湘宁. 带隔直电容的移相全桥DC/DC变换器特性分析[J]. 电力电子技术,2005,39(3):11-13.
[3] 杜贵平,陈立军,张波,等. 全桥逆变器高频功率变压器偏磁问题研究[J]. 电力电子技术,2006,40(3):74-76.
[4] 张小倩,史旺旺,胡舒阳. 移相全桥变换器偏磁抑制的不对称移相方法[J]. 电源学报,2013,46(2):88-92.
[5] HSIEH Y C, HUANG C S. Battery charger based on digitally controlled phase-shifted full-bridge converter[J]. IET on Power Electronics, 2011, 4(2):242-247.
[6] CHUNPENG LI,HONGQI BEN, DAQING WANG, et al. Effect of digital control on phase-shifted full-bridge system stability and dynamic performance[C]. 7thInternational Power Electronics and Motion Control Conference, 2012, (3):1883-1887.
Digital Realization of Magnetic Biasing Compensation for the Phase-shifted Full-bridge Circuit
SUN De-jin1, HONG Jie1, LI Wu-jie2
(1. Wuhan Zhengyuan Electric Co., Ltd., Wuhan Hubei 430012, China; 2. School of Automation,Huazhong University of Science and Technology, Wuhan Hubei 430074, China)
This paper presents an effective scheme for current closed-loop magnetic biasing compensation. By testing the peak value of the primary side current of the transformer, we can judge whether the phase-shifted full-bridge circuit is magnetically biased, and the compensation value of the PWM signal is obtained through PI controller arithmetic, so as to compensate for the magnetic biasing. Finally, the feasibility of the compensation scheme is verified through the experiment waveform.
phase-shifted full-bridge circuit; magnetic biasing; current closed loop compensation; PI controller; PWM signal
10.3969/j.issn.1000-3886.2016.01.019
TM46
A
1000-3886(2016)01-0059-03
孙得金(1977-),男,湖北武汉人,工程师,主要从事电力电子与电气传动的研究。洪捷(1984-),男,湖北武汉人,工程师,主要从事电力电子与电气传动的研究。李武杰(1989-),男,湖北孝感人,硕士生,主要从事电力电子与电气传动的研究。
定稿日期: 2014-04-16