基于LCI的大功率同步电机自控变频软启动控制技术研究
2016-10-12杨旭荣万里
杨旭,荣万里
(哈尔滨同为电气股份有限公司,黑龙江 哈尔滨 150001)
基于LCI的大功率同步电机自控变频软启动控制技术研究
杨旭,荣万里
(哈尔滨同为电气股份有限公司,黑龙江 哈尔滨 150001)
在诸多同步电机启动方式中,自控变频软启动方式是技术含量最高,性价比最优的启动方式,是同步电机软启动技术的发展方向。针对无位置传感器的自控变频式同步电机启动系统中的低速转子位置检测,加载启动,准同期并网等几个关键问题进行理论分析和实践验证,并在抽水蓄能电站实验装置上进行测试,取得了很好的启动效果。
电励磁同步电机;自控变频;无位置传感器;软启动;低速转子位置检测;加载启动;准同期
电励磁同步电机具有功率因数可调、效率高等优点,在冶金领域(高炉鼓风机),矿业领域(球磨机),发电领域(抽水蓄能)等大功率工业场合广泛应用。
目前,主流的启动方式有4种,分别为全压异步直接启动、磁控电抗器启动、液阻启动和自控变频启动。4种启动的性能比较如表1所示。
由表1可见自控变频启动方式有其他启动方式无法比拟的性能优势。但目前国内大功率电励磁同步电机启动装置主要还是依靠进口,尤其是变频软启动器,虽然我国的自控变频启动技术取得了一定的成果,但目前还没有形成完善的应用性产品,因此研究自控变频方式同步电机软启动装置具有重要的经济意义和战略意义。

表1 同步电动机启动方式性能比较Tab.1 Comparision among different starting mode performances of synchronous motors
本文给出自控变频式同步电机启动系统中的几个关键问题的理论分析,并给出了实际系统及运行解决方案。
1 同步电机软启动器原理及关键技术
1.1同步电机软启动器原理
同步电机软启动器的工作主要基于自控式同步电动机原理。自控式同步电动机主要由交-直-交电流型晶闸管变流器、同步电机、转子位置检测器及控制回路构成,如图1所示。
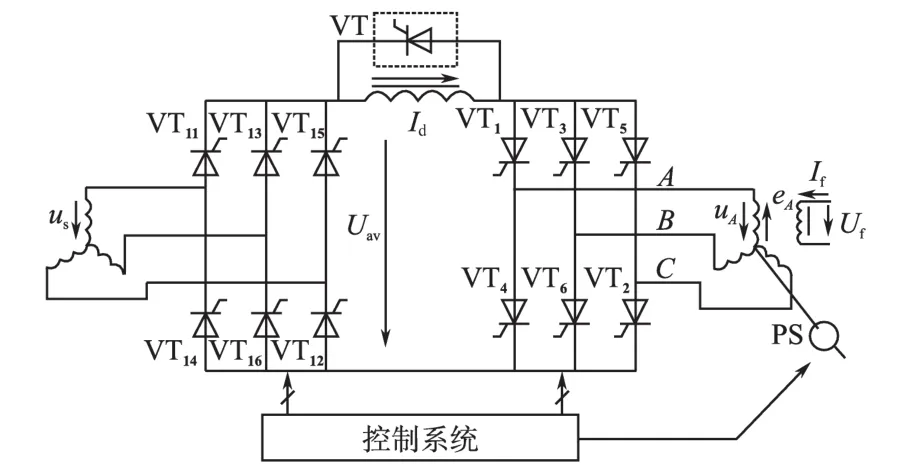
图1 自控变频式同步电机软启动原理图Fig.1 The illustration of synchronous motor automatic control variable frequency soft starting system
变流器的主回路由整流桥、直流平波电抗器和逆变桥组成。逆变桥的换相点由同步电机的转子位置决定,并通过整流桥的电流闭环进行调速控制。
1.2同步电动机的无位置传感器启动方法
本文采用分段测量电机反电动势的方法实现了同步电动机的全程无位置传感器启动。通过突加励磁的方法检测转子初始位置,通过反电动势深度滤波的方法获得低转速时的转子位置,通过测量电机反电动势获得中高速时的转子位置,实现了全程无位置传感器的启动。
1.2.1初始转子位置检测
转子初始位置检测本质上就是利用检测突加的励磁电流在电枢感应出的电动势,通过其与转子位置的对应关系来获得实际的转子位置。
突加励磁引起的三相定子感应电动势与转子位置关系表式达式为
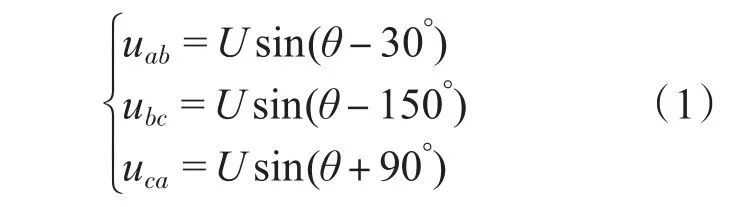
利用三角公式将式(1)化简整理得:

即转子位置与突加励磁感应电动势的关系为

由式(3)可知,转子位置可以通过检测三相感应电动势的幅值来计算,因此只要在突加励磁后检测三相反电动势的幅值关系,即可得到转子位置信息。
图2为突加励磁后在电机端感应出来的真实反电动势,只要对照图3中突加励磁对应反电势关系,即可判断转子位置扇区。

图2 突加励磁三相感应电动势的实际波形Fig.2 Three-phase inductive emf waveform with sudden applied excitation
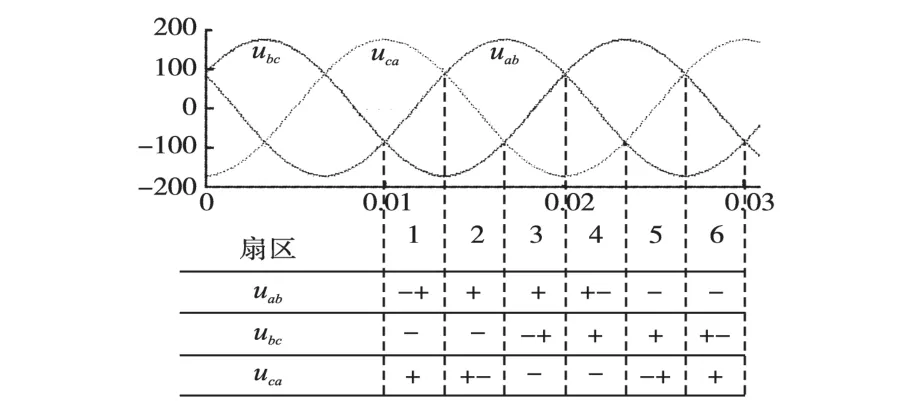
图3 突加励磁对应反电势关系Fig.3 The relation between sudden applied excitation and back emf
1.2.2反电动势深度滤波的低速转子位置检测
由于电机在低速旋转时,其真实反电动势淹没在励磁电流脉动(300 Hz)所感应出的电压噪声中,无法直接测量。如图4所示。

图4 低速时的真实反电动势Fig.4 The back emf with low speed
因此本文采用硬件的深度低通滤波器和软件的窗口均值滤波结合的方式来获取真实的反电动势,并通过软件补偿进行换相,解决了低速转子位置脉动的问题。
由于此时低通滤波器的导通频率和截止频率较低。不可避免地在滤波器当中会出现较大容值的电容,而较大容值的电容则会导致信号的相移过大,影响换相点的判断。
为了解决这一矛盾,并保证可靠换相。本文设计的滤波器在0~20 Hz之间的相移均在60°~90°之间。并通过软件对实际换相点进行补偿。低通滤波器的相频特性如图5所示。
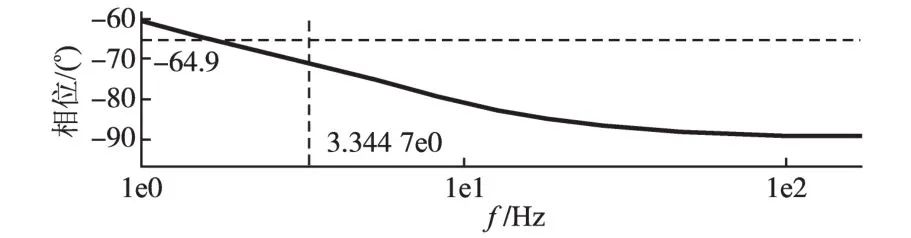
图5 滤波器的相频曲线Fig.5 The phase-frequency characteristics of filter
在实际系统当中,由于励磁电流脉动(300 Hz)所感应出的电压噪声幅值很大,在经过硬件滤波之后,信号的信噪比依然不高。为了保证过零点的准确检测,因此在软件中又添加一个时间长度为3.333 ms的窗口进行窗口均值滤波。此时启动效果良好。图6为10 kV,1 MW,1 500 r/min电机启动时反电动势的滤波波形,三相正弦波为滤波后的反电动势,方波为软件检测到的零点,阶梯状波形为励磁电流。可以看出,电机升速平稳,启动效果很好。

图6 10 kV,1 MW,1 500 r/min电机启动时反电动势的滤波波形Fig.6 The back emf with filter while the motor (10 kV,1 MW,1 500 r/min)starting
1.2.3中高速转子位置检测
在启动过程中,随着转速的提高,系统谐波对反电动势的影响越来越小。当转速达到额定转速的3%时,就可以通过检测反电动势过零点来获得转子位置信息。当电机工作在负载换相工作状态且换相超前角为θ=60∘时,换相点即为反电动势过零点,因此只要正确检测反电动势的过零点,就可以知道转子位置及相应的触发分区。触发分区与端电压过零点的对应关系见表2。
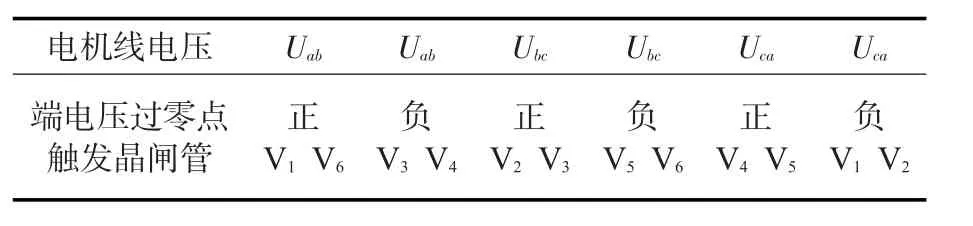
表2 γ0=60°时过零点检测与逆变桥触发脉冲序列对应关系Tab.2 The relation between zero-crossing detection and triggerpulses sequence of inverter bridge whileγ0=60∘
1.3并网过程及条件分析
当电机并网时,如果产生较大冲击电流,轻则伤及电机本体,重则会对电网产生冲击。因此同步电机在并网时必须保证机端电压相序、幅值、频率和相位与电网电压保持一致。
假设电网相电压瞬时值为

电机端电压瞬时值为

则电机端与电网的瞬时电压差由下式描述:

此瞬时电压差u即为滑差,该值决定了并网冲击电流的大小。
1.3.1相位差对滑差的影响
假定电机端电压与电网电压幅值相同,即Ug=Us=U,则式(6)变为

由式(7)可知,滑差中存在角频率为(ωs+ωg)/2的高频分量和角频率为(ωs-ωg)/2的低频分量,滑差包络线与低频分量相吻合。令θL=θs-θg,当θL=π时,滑差包络线达到最大值;当θL=0时,滑差包络线等于零。显然,如果在包络线等于零的点并网合闸,将不会产生冲击电流。因此应尽可能使并网合闸时刻接近滑差包络线的过零点。
1.3.2频差对滑差的影响
同样由式(6)可知,令ωL=ωs-ωg,当ωL=0时,滑差的包络线是恒值,这不利于并网点的选取。随着ωL增大,滑差包络线的周期也将变短。滑差包络线的周期越长,意味着滑差包络过零点处变化越慢,并网安全范围也越大。
1.3.3电压差对滑差的影响
由式(6)可知,令U1=(Us+Ug)/2,U2= (Us-Ug)/2。则式(6)可写成:

由式(8)可知,当电压差存在时,滑差曲线没有完全等于零的点,在相位差等于零时,滑差包络达到最小。电压差越大,包络的最小值越大,并网冲击越大。
通过上面的分析可知,为了创造好的并网条件,电压差尽可能小,频差要保持在较小的范围内,并网时刻尽可能抓准滑差包络达到最小值时并网。
1.4基于准同期原理的并网控制策略
1.4.1传统PI算法在准同期应用中存在的问题
从上面的分析可知,要想得到最好的并网结果,必须准确找到并网时刻的滑差曲线的过零点,即相位差要一致。难点在于控制板发出并网合闸指令到接触器主触头闭合需要一定的时间,因此要在控制算法中,预估出这段时间内相角差的变化量,提前给出并网合闸指令。在给出并网合闸指令之后,最容易出现问题是出现滑差不稳定,使得之前计算给出的合闸提前量不准确。因此保证滑差的稳定是至关重要的。在自控变频软启动系统中,大多采用速度外环,电流内环的双闭环调速PI控制。虽然PI控制可以使频率的稳态误差减小,但也会使频差不稳定,从而使滑差的一致性变差。当速度环只有比例环节的情况下,虽然频率的稳态误差无法消除,但却能使频差相对稳定,得到较为理想的滑差曲线。根据上述特点,本文提出了基于自适应复合控制的自动准同期算法。
1.4.2基于自适应复合控制的自动准同期算法
自控变频软启动并网过程可分为升速过程、准同期过程和并网判决过程。
1.4.2.1升速过程
当速度环只采用比例环节时,系统将存在稳态误差。稳态误差与比例系数的倒数成正比,比例系数越大,稳态误差越小,但是比例系数过大将使系统不稳定。因此需要一套自适应算法来消除稳态误差。
稳态时,假设电流环控制周期远高于速度环的控制周期,转速调节器的输出为

式中:ω*为转速给定;ω为输出实际转速;id为电流。
因为电磁转矩:Te=Cmid-Crid2,当忽略反应转矩时Cr=0。由式(9),转速稳定时有:

式中:TL为包括空载转矩在内的总负载转矩。
假设n时刻转速给定为ω*n,对应的稳态转速为ωn;n-1时刻转速给定为ω*n-1,对应的稳态转速为ωn-1,由于系统处于稳态,则有:

整理式(11),可得:

可以认为ωG=ωn,ωG为电网频率。则式(12)可改写为

为了减小超调量,引入调节系数Kv,式(13)可写为

式中:ω*n为最终的速度给定。
1.4.2.2准同期阶段
当转速接近额定转速后,进入准同期阶段。由于此时反电动势频率已接近额定值,因此需要对电机频率进行微调。将反电动势与电网电压的相位差变化率替代电机频率作为系统的输入,通过下式来微调速度给定:

式中:ωsi为滑差角频率;Ks为调节系数。
通过此方法可以直观地看出反电动势与电网电压的相位变化速率,并可以直接应用到并网判决中,减小程序的计算量。
下式为并网判决表达式:

式中:Δω为允许的角频率误差。
当滑差满足式(16)时,将不改变速度给定,进入并网判决阶段。
1.4.2.3并网判决阶段
并网合闸的判定必须要预估出这段时间内相角差的变化量,提前给出并网合闸指令。这样才能确保在并网时刻冲击最小。判决采用下式:

式中:δi为合闸时刻相角;Δδ为合闸允许的相角误差;TKM为接触器合闸时间。
图7为准同期阶段程序流程图。
1.4.3算法验证
验证平台为10 kV,1 MW,1 500 r/min同步电机。图8为实际的并网电流波形。

图7 准同期阶段程序流程图Fig.7 Program flow chart of quasi-synchronization stage
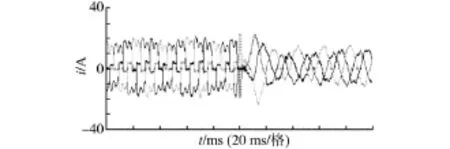
图8 并网三相电流波形Fig.8 Three-phase current while grid connecting
由图8可以看出,并网最大冲击电流约为15A,为电机额定电流的40%,并网效果良好。
2 自控变频软启动装置的实现
自控变频软启动装置主要由进线电抗器、三相全控晶闸管整流器、平波电抗器、三相全控晶闸管逆变器及控制系统构成。系统框图如图9所示,三相电压经整流桥和平波电抗器变为6脉波直流电流,后由逆变桥逆变输出至电机定子回路。系统核心控制器由整流、逆变、励磁控制板完成,控制板均采用TI公司的TMS320F2812作为主控芯片,通过高速CAN总线完成板间的数据交互。整流部分负责整个启动过程中的控制逻辑、网侧电压检测、网侧电流检测以及直流母线电流的闭环调节;逆变部分采集电机端电压、实时计算电机转子位置及逆变桥的换相控制。励磁装置提供同步电机的励磁电流。
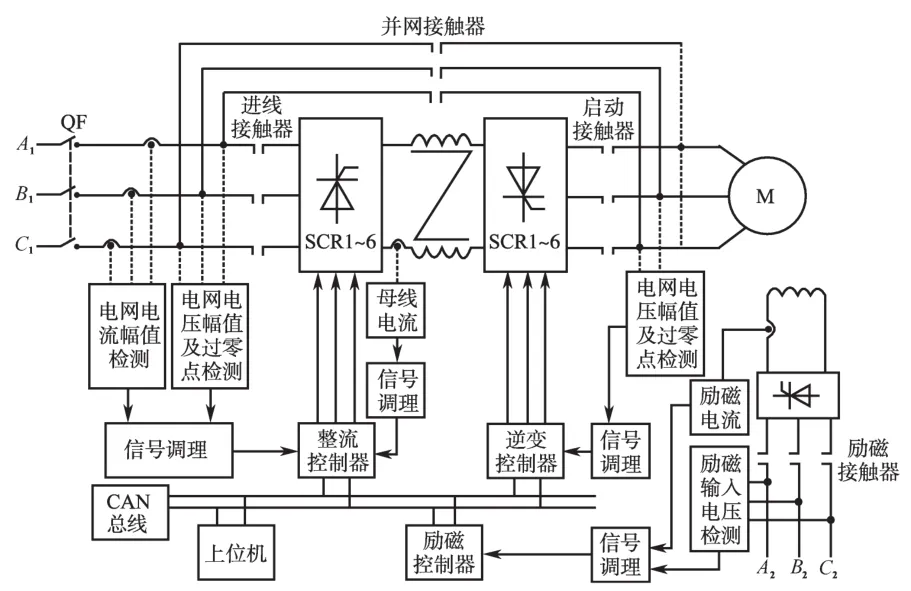
图9 自控变频同步电动机软启动控制系统的结构框图Fig.9 The block diagram of synchronous motor automatic control variable frequency soft starting system
3 抽水蓄能电站实验装置应用
3.1实验装置组成
抽水蓄能电站实验装置为400 V系统,由以下部分组成:自控变频软启动装置,同步电动机,与同步电动机连轴的异步电动机(用于模拟加载),低压变频器。具体技术参数如下:自控变频软启动装置为哈尔滨同为电气股份有限公司的产品,额定输出容量50 kW;同步电动机100 kW,500 r/min;异步电动机200 kW,500 r/min;低压变频器为西门子S1204象限变频器,输出功率200kW。
3.2深蓄曲线的模拟
图10给出了系统的结构框图。其中西门子S120 4象限变频器工作在转速—转矩模式,即根据光电编码器返回的转速和预置的转速—转矩曲线控制异步电动机输出转矩以模拟深蓄加载曲线,自控变频软启动装置带动同步电动机实现启动、并网。图11给出某抽水蓄能电站的启动曲线。

图10 系统的结构框图Fig.10 The block diagram of system
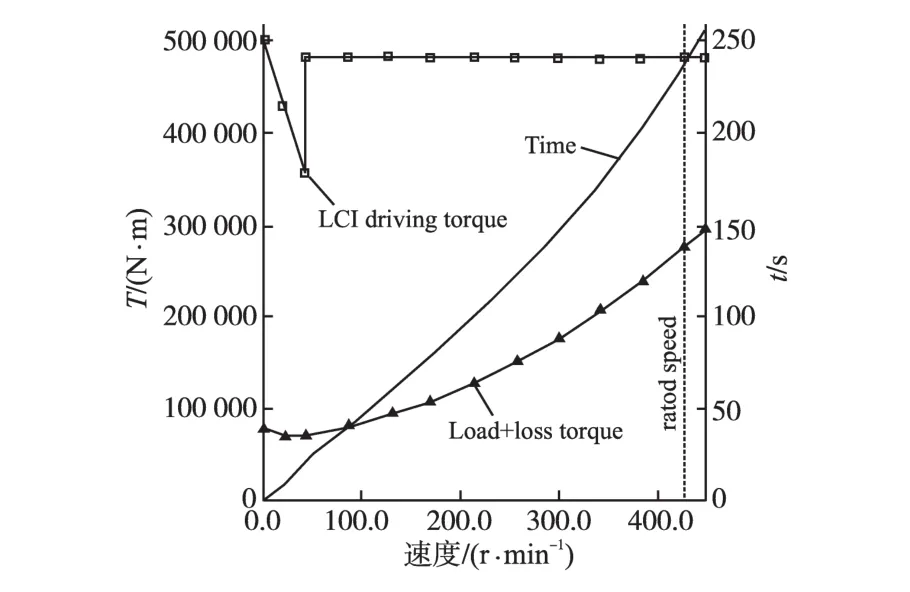
图11 某抽水蓄能电站的启动曲线Fig.11 Starting curves of a pumped storage power station
如图11所示,装置容量为22 MW,电机额定转速428 r/min,所以:

根据图中比例可得:

启动转矩和最终的并网转矩比例如下:
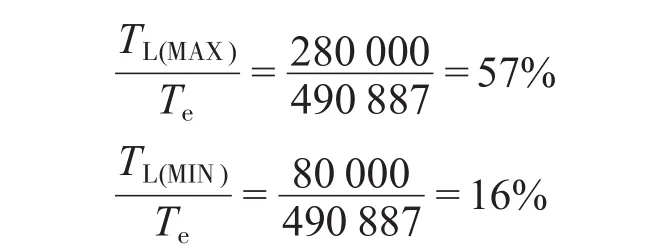
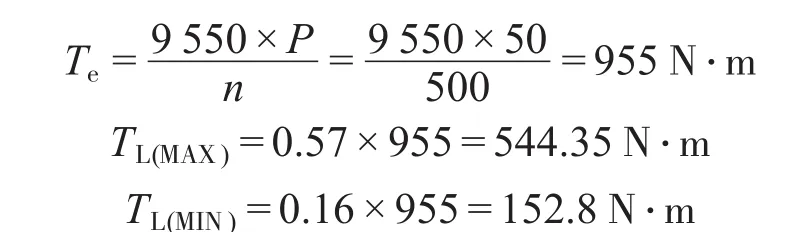
实验装置为50 kW,电机额定转速500 r/min。为了尽量模拟实际运行情况将上述计算按比例缩小。计算如下:
3.3实际启动情况
3.3.1低速加载启动
图12是加载低速启动时的反电动势滤波波形,采用深度滤波的低速转子位置检测,使得电机的低速启动换相点有据可依,克服了自给脉冲启动方式的启动时间慢、转子脉动和小范围反转问题。
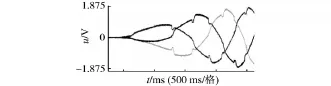
图12 启动时反电动势的滤波波形Fig.12 The back emf with filter while starting
3.3.2加载并网
图13是加载并网的单相电流波形,实际的并网冲击电流为120A,仅为电机额定电流的40%。
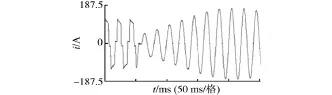
图13 并网波形Fig.13 The waveform when grid connected
3.3.3加载启动
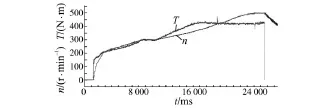
图14 转速—转矩曲线Fig.14 Rotational speed—torque curves
图14为西门子S120上位机实际测出的按给定加载曲线加载启动的转速—转矩曲线。由曲线可以看出,由于负载转矩随着转速的加大而加大,故加速曲线并非直线,设备完全实现了按规定负载,全程加载启动。
4 结论
通过对低速转子位置检测的研究,系统可以对低速转子位置进行定位,并作为依据进行换相控制,解决了自给脉冲式启动方法的转子脉动和相邻触发扇区存在小范围反转等问题。适用于如轴流压缩机(高炉鼓风机)、离心压缩机(制氧压缩机)等绝不允许转矩(大范围)脉动和转子反转的场合,具有实际意义。
通过对准同期并网策略的研究,提出的新方法解决了传统PI控制带来的转速不稳和并网冲击电流过大等问题。为电机的稳速和并网提供了优质的解决方案。
目前哈尔滨同为电气股份有限公司研发的自控变频软启动装置已完成低压400 V系统和高压10 kV系统的空载启动并网应用,并已销售使用。还在低压400 V系统环境下,模拟了抽水蓄能电站的启动方式,进行全程加载启动、并网实验。试验结果表明,基于LCI的自控变频技术在解决同步电机启动和调速过程中具有优异的性能。
[1] 李崇坚.交流同步电机调速系统[M].北京:科学出版社,2006.
[2] 陈伯时.电力拖动自动控制系统[M].第3版.北京:机械工业出版社,2004.
[3]Chihiro Hasegawa,Shoji Nishikata.A Sensor-less Rotor Posi⁃tion Detecting Method for Self-controlled Synchronous Motors [C]//International Conference on Electrical Machines and Systems(ICEMS),2008:1017-1021.
[4] 李志民,张遇杰.同步电动机调速系统[M].北京:机械工业出版社,1996.
[5] 王高林,杨荣峰,于泳,等.内置式永磁同步电机无位置传感器控制[J].中国电机工程学报,2010,30(30):93-98.
[6]Piippo A,Hinkkanen M,Luomi J,et al.Analysis of an Adap⁃tive Observer for Sensorless Control of Interior Permanent Magnet Synchronous Motors[J].IEEE Transactions on Indus⁃trial Electronics,2008,55(2):570-576.
[7] 高东升.大功率同步电机的软启动[D].成都:西南交通大学,2009.
[8] 陈小桥,周水斌,王先培.一种新的相位差算法及其在自动准同期中的应用[J].武汉大学学报,2003,36(6):96-98.
Device and Control Technology of Self-controlled Soft Start with Variable Frequency for High-power Synchronous Motor Based on LCI
YANG Xu,RONG WanLi
(Harbin CODO Electric Co.,Ltd.,Harbin 150001,Heilongjiang,China)
In many ways of synchronous motor starting,automatic control variable frequency soft starting is the development direction of synchronous motor soft starting with the highest technology and performance.The problems involved in automatic control variable frequency soft starting device without position sensor,such as rotor position detectionis during low speed,starting with load,quasi-synchronization grid connected control,were analyzed and studied in practice.It worked perfectly on a model of pumped storage power station.
electrical excitation synchronous motor;self-controlled variable frequency;sensor less;soft start;rotor position detection in low speed;start with load;quasi-synchronization
TM341
A
2015-09-13
杨旭(1987-),男,本科,助理工程师,Email:13845049584@163.com