水上飞机起降移动安全区定量计算分析
2016-10-12翁建军秦雪儿李亚攀
翁建军, 秦雪儿, 李亚攀
(1. 武汉理工大学 航运学院, 武汉 430063; 2. 内河航运技术湖北省重点实验室, 武汉 430063; 3. 宁波港股份有限公司 油港轮驳分公司, 浙江 宁波 315200)
水上飞机起降移动安全区定量计算分析
翁建军1,2, 秦雪儿1,2, 李亚攀3
(1. 武汉理工大学 航运学院, 武汉 430063; 2. 内河航运技术湖北省重点实验室, 武汉 430063; 3. 宁波港股份有限公司 油港轮驳分公司, 浙江 宁波 315200)
为保障水上飞机起飞和降落过程中航行的安全,提出一种基于水上飞机与船舶安全会遇的移动安全区边界确定方法。该方法通过分析水上飞机起降阶段的航行及操作特点,以船舶跟驰模型研究机理为基础,构建水上飞机起降时与在航船舶的安全会遇间距模型,并以此建立水上飞机领域模型;根据水上飞机水面爬升操作特征,考虑水上飞机对水面净空高度的需求,构建水上飞机爬升时的安全跨障会遇模型;在结合水上飞机领域模型的基础上,定量界定水上飞机起降移动安全区的尺度。研究结果表明,水上飞机起降移动安全区尺度与水上飞机性能参数、会遇船舶尺度、航向及航速相关。在水上飞机管理应用中,可根据水上飞机机型及应用水域实际交通情况确定水上飞机水面起降移动安全区的尺度。
水路运输; 水上飞机; 起降; 船舶领域; 移动安全区
Abstract: In order to prevent a seaplane from coming into collision with vessels while taking-off or landing, a calculation method is worked out for determining the size of the Moving Safety Guard Zone around the seaplane. The navigational characteristics of a seaplane while taking-off and landing are analyzed and the model for safe approaching distance is built on the basis of the mechanism of vessels following model. This model establishes the on-water seaplane domain. According to the climbing operating characteristics of the seaplane, with the necessary headroom for the plane to climb up to be taken into account, the model for the distance ensuring safely crossing obstacles is also established. The combination of the two models makes the model of the resultant seaplane domain with which the Moving Safety Guard Zone around a seaplane is quantified. The study shows that the Moving Safety Guard Zone around a seaplane depends on the performance parameters of a seaplane and the side, course, and speed of the concerned vessels. In the practical operation management of seaplane, the scale of Moving Safety Guard Zone of seaplane is determined by the actual traffic situation and the type of involved seaplane.
Keywords: waterway transportation; seaplane; taking-off and landing; ship domain; moving safety guard zone
《1972年国际海上避碰规则》将“水上飞机”定义为能在水面操纵而设计的任何航空器。[1]水上飞机接触水面时的属性为船舶,而脱离水面时的属性为航空器,其起降操作需在特定的水面操作区进行。水上飞机码头通常建于港口水域,在该水域可能会出现水上飞机与船舶共存的局面,对两者的航行安全具有较大影响。水上飞机起降操作过程中,在其周围设置移动安全区[2]是保障其通航安全的有效措施。
目前国内外有关水上飞机的研究较少,对水上飞机移动安全区范围的设置尚无统一标准,也缺乏相应的设置依据。[3]美国联邦航空局(Federal Aviation Administration,FAA)发布水上飞机基地建设的相关要求[4],出台《水上飞机基地咨询通告》(Advisory Circular on Seaplane Bases)及欧盟地区性发展基金(European Regional Development Fund,ERDF)Seaplane-Project项目[5],极大地推进了水上飞机对North Sea区域性的航空作用,但对水上飞机移动安全区的设置指导有限。国内对水上飞机通航安全的研究[6]较少,海事管理部门对水上飞机的管理[7]也存在较多问题。
水上飞机移动安全区的设置不仅要保障水上飞机的航行安全,还要提高其通航水域船舶的航行效率。对此,分析水上飞机滑行、起飞和降落各阶段的操纵性能及航行特点[8],建立水上飞机与船舶的安全会遇间距模型,构建水上飞机领域模型,并结合水上飞机的爬升性能提出定量计算水上飞机移动安全区尺度的方法。
1 水上飞机起降运动特性
水上飞机在滑行、起飞及降落等不同阶段的运动状态各不相同,其从码头驶入滑行通道、进入水面操作区进行起飞操作的加速度及速度变化过程分别见图1和图2。

图1 水上飞机起飞 加速度变化过程

图2 水上飞机起飞速度 变化过程
1) 在t0~t1时段内,水上飞机在水面滑行通道匀速滑行,此时其加速度aS=0,航行速度约3 m/s。
2) 在t1~t2时段内,水上飞机进入水面操作区并选择合适的起飞方向进行起飞操作,此时其作变加速运动,航行速度增加越来越快。
3) 在t2~t3时段内,水上飞机在水面操作区进入加速稳定阶段,此时其作匀加速运动,航行速度均匀增加,在t3时刻增至50 m/s左右即脱离水面。
4) 在t3~t4时段内,水上飞机脱离水面进入空中飞行,此时其作变加速运动,并将飞行速度增加至某一稳定值,进入巡航状态。
水上飞机降落的操作过程为起飞的逆过程。
2 安全会遇间距模型的建立
2.1水上飞机与船舶安全会遇间距模型
以同一航道内船舶跟驰模型为基础,根据水上飞机起降时与船舶的会遇局面,将水上飞机与来船的航行速度在同一方向上进行分解,建立适用于水上飞机与船舶会遇的跟驰模型(见图3)。
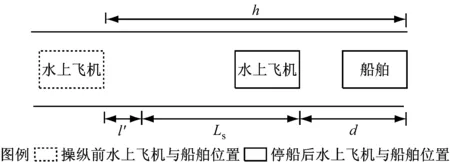
图3 水上飞机与船舶会遇跟驰模型
在水上飞机起降时与来船的会遇跟驰模型中,假设水上飞机在会遇来船时能通过采取紧急措施避免碰撞危险发生,则水上飞机与来船的安全会遇间距计算模型为
h=l′+LS+d=vStr+LS+d
(1)
式(1)中:h为水上飞机与船舶的安全会遇间距;l′为驾驶员反应时间内的相对航行距离;tr为驾驶员反应时间;LS为水上飞机与来船的相对制动航行距离;d为水上飞机与船舶间的安全余量,取3倍船长;vS为水上飞机与船舶在同一航向上的相对速度。
(2)
式(2)中:v0为水上飞机航速;φ0为水上飞机航向;vT为来船航速;φT为来船航向。
对水上飞机的运动参数随时间t的变化进行积分,可得水上飞机航行速度增加值ΔV与水面变速运动距离RS为
(3)
(4)
水上飞机与来船(制动加速度为aT)的相对运动制动距离LS表示为

(5)
(6)
(7)
根据所建立的水上飞机与来船的安全会遇间距模型,可得

(8)
水上飞机在水面上加速起飞的过程中,其与来船的安全会遇间距随速度的增大也会变大;在起飞的不同阶段,其与船舶的安全会遇间距也不相同。
2.2水上飞机各运动阶段的安全会遇间距模型
2.2.1匀速滑行阶段的安全会遇间距模型
水上飞机起飞前从码头驶入水面操作区及降落后驶离水面操作区靠泊码头均需在水面滑行通道上作匀速滑行运动,该过程中的速度约为3 m/s。在该阶段,水上飞机与船舶的安全会遇间距模型为

(9)
任何方位的来船与水上飞机的会遇均对应于相应的安全会遇间距。
2.2.2变速操作阶段的安全会遇间距模型
在t1~t3时段内,水上飞机进入水面操作区进行起飞前加速操作,此时通过加速运动达到预定起飞速度,脱离水面飞行。由于水上飞机在进入水面操作区作变速航行阶段的航行速度远大于后方来船的速度,不存在船舶追越水上飞机的情况,因此水上飞机与后方来船不需要设置安全会遇间距。该运行阶段水上飞机与来船航行安全间距模型表示为
(10)
水上飞机在t1时刻驶入水面操作区的初始速度为3 m/s,在t3时刻脱离水面时的速度为50 m/s,则有
(11)
水上飞机在减速降落水面过程中与来船的会遇也适用于安全会遇间距模型。水上飞机起飞与降落操作性能不同导致安全会遇间距也不相同。
3 水上飞机领域模型的建立
确定水上飞机的航向后,针对任一方位的来船,可确定相对方位角φR为
φR={φR1,φR2,…,φRn}
(12)
在来船参数与相对方位角已知时,可计算出该方位角所对应的安全会遇间距。水上飞机的领域边界曲线由各方位上的安全间距点pDi(i=1,2,…,n)组成,其中DS为水上飞机领域边界。
DS={PD1,PD2,…,PD}
(13)
通过设定来船与水上飞机的参数,可相应地计算出水上飞机不同方位的安全会遇间距,各安全会遇间距点即组成水上飞机领域。
目前,国际上水上飞机项目一般选址在港口水域。我国首个民用水上飞机基地选址在三亚港。根据有关调研资料,在水上飞机水面操作区附近的船舶中选取一种船型,船舶参数及驾驶员反应时间设置见表1。所选的三亚港水上飞机参数见表2。

表1 来船船舶的参数一览表
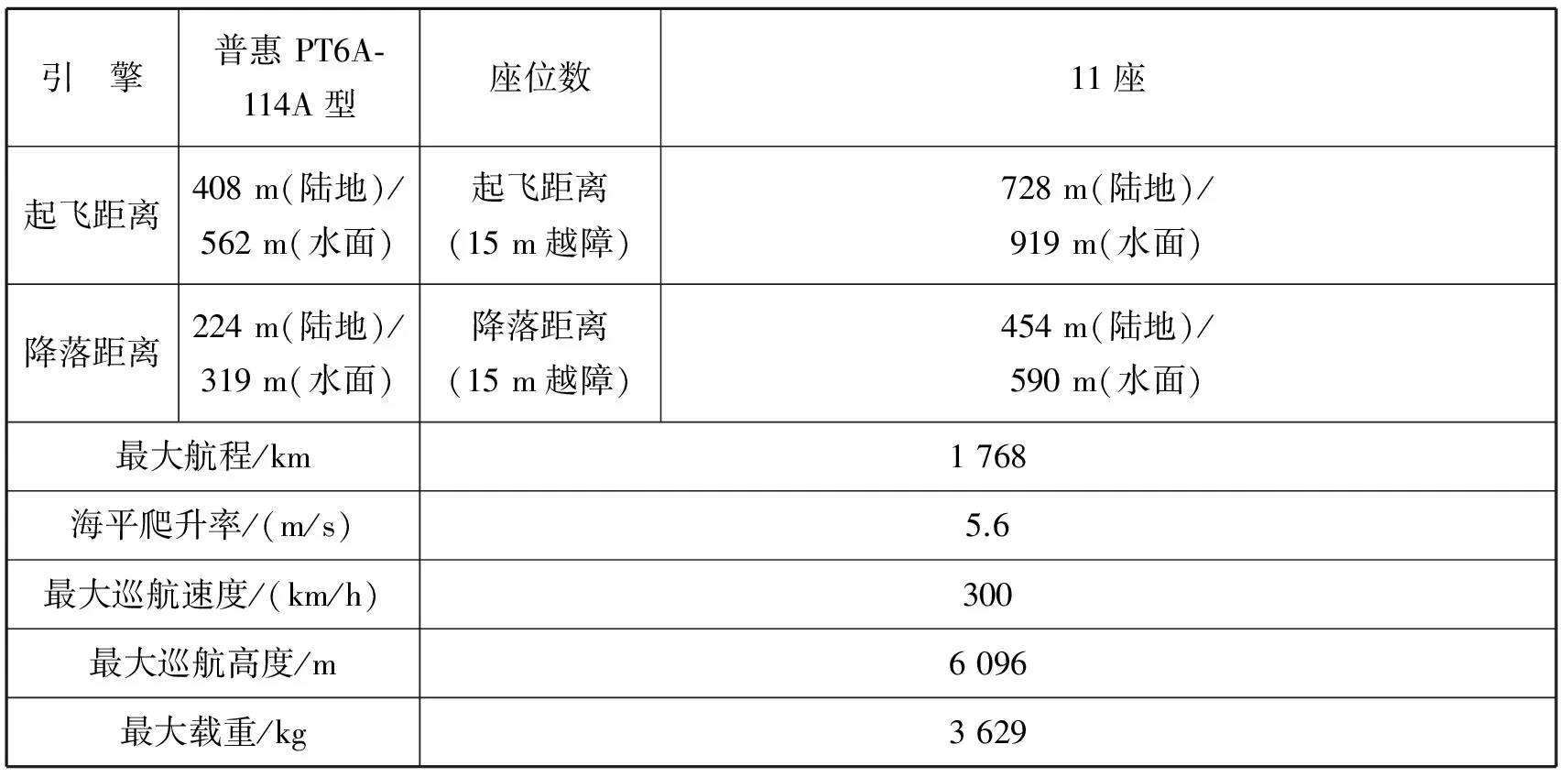
表2 “塞斯纳凯旋水路”号水上飞机性能参数一览表
3.1匀速滑行阶段水上飞机领域
输入水上飞机与船舶的各项参数进行计算,模拟得出水上飞机在匀速滑行阶段的领域图(见图4)。图4中该运动阶段水上飞机领域4个方位上的安全会遇间距见表3。
水上飞机在匀速滑行过程中,其领域模型为一个不规则的椭圆(即前、后半长轴长度不一致)。
3.2水上飞机变速操作阶段领域
在水上飞机变速运动阶段,通过分析水上飞机与来船的安全会遇模型可知,其与水上飞机的速度正相关,该阶段水上飞机的速度随时间不断增加,其所对应的安全会遇间距也相应增大是一个动态领域模型。
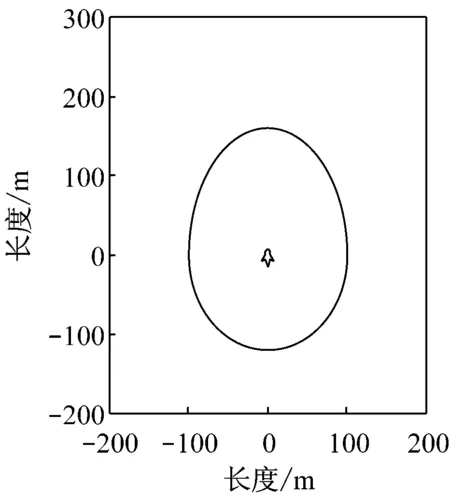
图4 水上飞机匀速滑行阶段领域图

表3 水上飞机领域4个方位上的安全会遇间距m
3.2.1水上飞机起飞前加速阶段领域
通过分别设定水上飞机起飞前的航行速度(10 m/s,30 m/s和50 m/s)及来船的各项参数进行计算,得到水上飞机在不同速度下与来船的安全会遇间距值(见表4)。
根据水上飞机起飞前加速情况下的不同航行速度,模拟得出水上飞机起飞前加速操作阶段的领域图(见图5)。
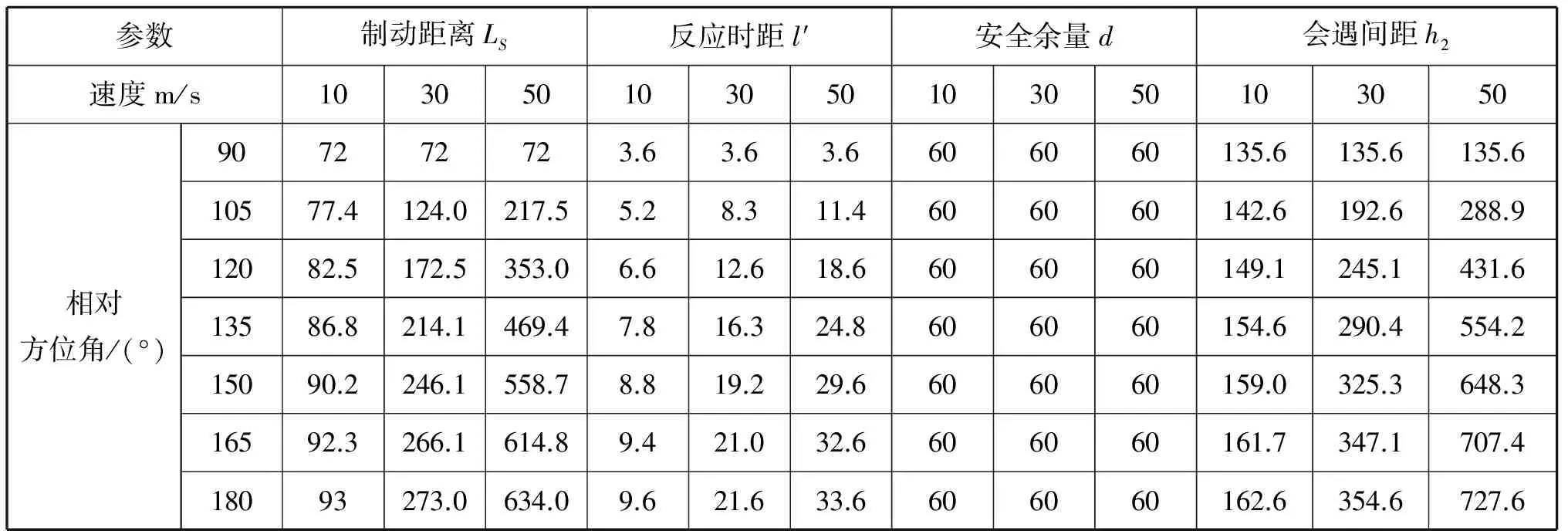
表4 水上飞机起飞时不同速度下的安全会遇间距 m

图5 水上飞机起飞前加速操作阶段领域图
3.2.2水上飞机降落后减速阶段领域
水上飞机选择合适的方位降落水面后,需在水面操作区作减速运动。同理,通过设定水上飞机降落后的速度(50 m/s,30 m/s和10 m/s)及与来船的各项参数进行计算,得到水上飞机在不同速度下与来船的安全会遇间距值(见表5)。
根据不同的航行速度,模拟得出水上飞机在降落后减速操作阶段的领域图(见图6)。

图6 水上飞机降落后减速操作阶段领域图
3.3水上飞机净空需求下的领域
由于水上飞机起降操作区前方可能存在锚泊船等水上“障碍物”,因此水上飞机脱离水面进入空中爬升时在相应的海平爬升速度下对水面净空高度有一定的需求[9],俯冲降落时同理。由此,为了使其在水面与空中安全过渡,水面净空高度应有相应的安全保障值,即水上飞机净空领域。
分析水上飞机各项起降性能参数及越障条件,建立水上飞机起飞、降落过程示意图(见图7和图8)。

表5 水上飞机降落时不同速度下的安全会遇间距 m

图7 水上飞机起飞过程15 m越障示意图
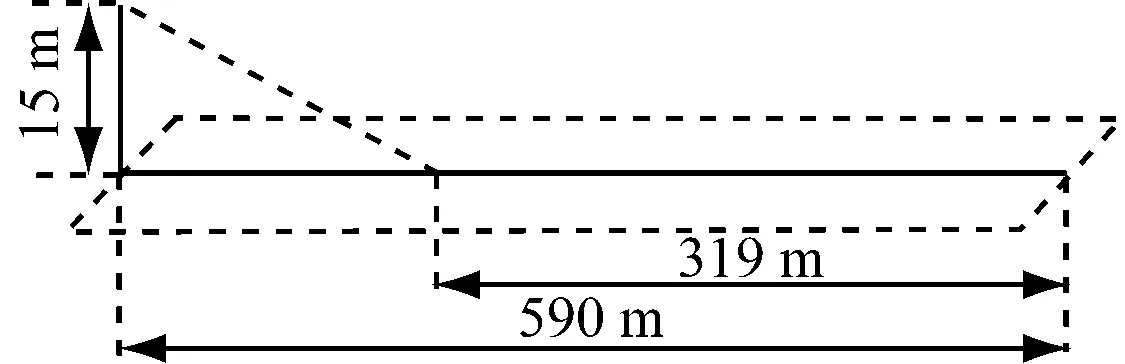
图8 水上飞机降落过程15 m越障示意图
水上飞机脱离水面爬升时,设其航向角与水平面的夹角为θ,水平航行分速度为v0x,垂直航行分速度为v0y,水平方向与垂直方向对应的飞行距离分别为Hx和Hy,起飞过程中的航行速度和距离分解见图9。

图9 水上飞机爬升过程分解
水上飞机在水平方向和垂直方向上的航行速度分解表达式为
(14)
在水平方向上的飞行距离分量Hx表示为
(15)
根据水上飞机的性能参数及其海平爬升率vp,在垂直方向上的航行距离分量Hy表示为
Hy=v0sinθ·t
(16)
根据垂直方向上的分速度v0sinθ=vp进行变形,代入式(15),则有

(17)

(18)
水上飞机爬升过程中水平移动距离与垂直移动距离直接相关,即跨障越高,则水平方向上所需的距离越远。考虑到水面净空高度需求,当水上障碍物高度H(船舶水面以上高度)确定时,可相应地确定安全跨越障碍物的水平间距模型h3(安全跨障会遇模型),其中L′为起飞或降落的水面滑行距离。

(19)
将式(18)代入到式(19)中,可知水上飞机安全跨障会遇间距模型与来船水上建筑物高度H相关。
(20)
在水上飞机起降航向和来船水面以上高度已知时,可通过该模型确定跨障所需的水平距离。船舶水面以上的高度越高,则安全跨越该高度所需的水平距离越远。在水面安全会遇距离得以保证的条件下,水上飞机才能安全跨越船舶水面以上高度而不致于在空中与船舶(桅顶)发生碰撞。
4 水上飞机起降移动安全区尺度的界定
在结合水上飞机领域模型和安全跨障会遇模型的基础上,可定量界定水上飞机起降移动安全区的尺度。为便于港口水域船舶对水上飞机移动安全区进行识别,移动安全区的形状可界定为方形。移动安全区以安全跨障会遇模型(式(20))为长,以水上飞机领域模型边界(式(10))最大宽度为宽。
水上飞机机型直接影响其移动安全区的尺度,在某港口的同一机型(如表2所示)下,结合其起降水域的通航环境,设置水上飞机与各类参数船舶的会遇,通过依次控制唯一变量定量计算水上飞机在各种会遇情况下的移动安全区尺度(见表6)。

表6 水上飞机移动安全区尺度
在海事管理实务中,水上飞机航行移动安全区可根据水上飞机的性能参数及起降水域的交通特征来确定。
5 结束语
从水上飞机的航行及操作特点出发,借鉴跟驰模型等相关理论,构建水上飞机领域模型,并确定定量计算水上飞机移动安全区尺度的方法。研究得出以下结论:
(1) 建立水上飞机起降时与船舶的安全会遇间距模型,该模型与水上飞机性能和船型参数相关;
(2) 分别构建滑行阶段、起飞和降落阶段的水上飞机领域模型,其形状和尺度随运动状态的变化而变化;
(3) 结合安全跨障会遇模型和领域模型边界确定水上飞机起降移动安全区尺度。
[1] IMO.1972年国际海上避碰规则[S].中华人民共和国海事局,译.北京:人民交通出版社,2008.
[2] 文元桥,杨雪,肖长诗. LNG船舶进出港航行移动安全区宽度定量计算分析[J].中国安全科学学报.2013,23(5):68-75.
[3] 褚林塘,叶树林 . 水上飞机文集 [M]. 北京:航空工业出版社,2011.
[4] Federal Aviation Administration, U. S. Department of Transportation. Advisory Circular on Seaplane Bases[S]. 1994.
[5] SEAPLANE: Sustainable and Efficient Air Transport-Platform for Linked Analysis of the North Sea Air Transport Environment[S]. European Community-European Regional Development Fund. 2003.
[6] 翁建军,周阳. 水上飞机与船舶碰撞风险因素建模[J].中国航海.2013,36(3):70-75.
[7] 彭鹏飞,陶维功. 我国水上飞机的海事管理对策与建议 [J].中国海事,2010(4):48-51.
[8] 武庆威,高霄鹏,吴彬. 水上飞机滑行阶段静水阻力性能的一种估算方法[J].船海工程.2013,42(3): 54-57.
[9] 陆军,吴国强,吴叶斌,等.飞机降落过程自适应控制仿真研究[J].计算机仿真.2011,28(4):53-57.
QuantitativeMethodforEstablishingMovingSafetyZoneAroundSeaplaneDuringTaking-OffandLanding
WENGJianjun1,2,QINXueer1,2,LIYapan3
(1. School of Navigation,Wuhan University of Technology, Wuhan 430063, China; 2. Hubei Inland Shipping Technology Key Laboratory, Wuhan 430063, China; 3. Oil Port Barge Branch, Ningbo Port Co., Ltd., Ningbo 315200, China)
V271.5; U691
A
2016-08-11
翁建军(1965—),男,浙江诸暨人,教授,硕士,从事船舶避碰、海事管理理论与技术研究。E-mail:wjj11233@163.com
秦雪儿(1992—),女,湖北监利人,硕士生,从事交通运输工程研究。E-mail:785084060@qq.com
1000-4653(2016)03-0087-06
