船舶推进系统能量耗散建模与分析
2016-10-12刘伊凡张跃文孙培廷刘竹风
刘伊凡, 张跃文, 孙培廷, 刘竹风
(大连海事大学 轮机工程学院, 辽宁 大连 116026)
船舶推进系统能量耗散建模与分析
刘伊凡, 张跃文, 孙培廷, 刘竹风
(大连海事大学 轮机工程学院, 辽宁 大连 116026)
建立船舶推进系统能量耗散分析模型,运用仿真的方法对船舶推进系统整个航次内的能量耗散进行研究。通过对推进系统能量传递过程进行分析,将能量耗散因素分为固定能量消耗和额外能量消耗;分别对坐标系、环境模型、船体运动和推进系统进行研究,建立推进系统能量分析模型;结合欧洲中期天气预报中心(European Centre for Medium Range Weather Forecasts, ECMWF)的气象信息,对目标船在新加坡—香港航线上的航行过程进行仿真研究。计算实例显示:在轻浪海况、主机设定负荷为70%时,推进系统固定能量消耗所占比例为86.7%~89%,主要受航速影响;额外能量消耗占11%~13.3%,受海况、操舵及航线综合影响。利用该模型对不同航线进行分析,可预报航期,并对航线中导致能耗升高的因素进行分析,为优化航线设计提供依据。
船舶推进系统; 能量耗散; 航次仿真; 航线能效分析
Abstract: To analyze the energy consumption of a ship propulsion system on a voyage basis, a simulation method is proposed. The energy consumption is divided as the basic part and the extra part according to the energy transfer process analysis. The coordinate system, the environment model, the ship motion and the propulsion system are studied and the energy consumption model is built. The propulsion system behavior on the Singapore-HongKong route with application of meteorological information from European Centre for Medium Range Weather Forecasts (ECMWF) is simulated and analyzed with the model. The simulation shows that in smooth sea state and 70% engine load, the basic part of energy consumption ranges from 86.7% to 89% depending mainly on the speed, and the extra part of that varies between 11% and 13.3% according to the combination of the sea state, the ship maneuvering and the route design. This model can be used to analyze voyage routes, forecast the shipping date, and identify the factors that lead to higher energy consumption so as to find the way to optimize the route design.
Keywords: ship propulsion system; energy consumption; voyage simulation; energy efficiency analysis of route
船舶燃油消耗是能量消耗的过程,存在于船舶营运的各个方面(如推进系统、照明、供热、通风及空调),其中最主要的是船舶推进系统消耗的能量。[1]为提高船舶能效,减少燃油消耗和CO2排放,相关企业及科研院所等已展开相关研究,通过对船舶能效状态进行分析,寻求提高船舶营运效率的方法。
船舶实际航行过程中的能效状态不仅受自身能效水平的影响,而且受环境干扰力、漂角及操纵等其他复杂因素的影响。[2]为研究船舶推进系统运行过程中的能量耗散过程,结合气象数据、目标船的设计参数(船体型线图、主机型号、螺旋桨设计参数及舵设计参数)、试验数据(船模试验、试航报告及螺旋桨敞水试验)及目标航线,在球面坐标系下对船舶的整个营运过程进行动力学仿真,并据此对推进系统能量消耗过程进行研究。
1 船舶能量耗散影响因素
在船舶营运过程中,为克服船体受到的阻力,主机在调速器的作用下输出轴功率,经过传动轴,由螺旋桨将旋转的能量转换为推进的能量,推动船舶前进[3];同时,操作舵机使船舶按照设定的航线航行。在此过程中,推进系统能量耗散分为以下2部分:
1) 螺旋桨及轴系的能量传递损耗、静水阻力造成的固定能量消耗。
2) 环境风和浪干扰导致的阻力、偏移力及为保持航线造成的额外能量消耗。
影响推进系统固定能量消耗的因素包括:主机效率、传动效率、推进效率及船体和螺旋桨的清洁情况等。当船舶推进系统的能效水平一定时,航速设计直接影响推进系统固定能量的消耗。影响额外能量消耗的因素有:风、浪、流等对船体受力的影响、船舶操纵及漂角导致的水动力等。由于这些力的大小与船舶的几何形状、操纵性、耐波性等诸多因素相关,因此在分析推进系统的能量消耗过程时,需对不同因素的能量消耗进行计算,通过对比和定性分析,找出降低船舶能效水平的主要因素。
2 能量耗散模型的建立
2.1坐标系和环境模型
船舶的能量消耗分析模型主要应用随船坐标系和球面坐标系(见图1)。船舶在海面航行时,围绕3个坐标轴作6个自由度的运动。由于垂荡、横摇及纵摇对船舶推进装置功率增大的影响较小,因此只考虑船舶的横荡u、纵荡v和艏摇r(具体见图1a)。[4]地球为球体,当从船舶营运的角度考虑船体运动时,必须将随船坐标系转换为地球球面的经纬度(见图1b)。

图1 随船坐标系和球面坐标系
在建模过程中,需获得实时或预报的海洋气象数据。海洋气象数据可通过多种渠道[5]获得,这里选取GRIB格式文件作为天气模型的数据基础。GRIB文件中的数据是以格点的格式存储的,而在实际仿真过程中,船舶的位置不会精确地处于网格点上;同时,GRIB数据连成的网格并不是规则的矩形网格,而是近似为梯形。[6]因此,为在建模过程中获得目标坐标对应的物理量,首先根据目标坐标确定其所在网格,然后根据网格4个角的物理量和经纬度值进行曲面差值。图2为GRIB文件数据读取示意,o(io,jo,t)为船舶在时间t时球面坐标(io,jo)处的物理量。根据GRIB文件所读取的oi,j,oi+1,j,oi,j+1,oi+1,j+1及o点相对网格4个点的位置,通过曲面差值来实现。

图2 GRIB文件数据读取示意
2.2环境-船体运动-推进系统数学模型
在“2.1”节的基础上,结合船舶MMG(Manoeuvring Mathematical Model Group)运动模型和推进系统模型,可建立环境-船体运动-推进系统的数学模型(见图3)。
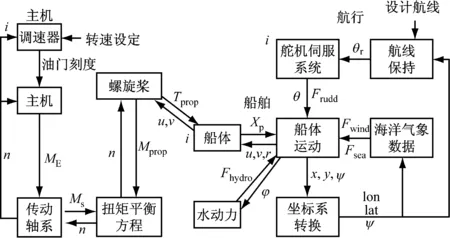
图3 环境-船体运动-推进系统的数学模型
在图3所示的模型中,使用调速器对主机转速的控制[9]和自动舵保持航线的控制[10-11]2个PID控制。环境-船体运动-推进系统数学模型将营运中的船舶作为一个动力系统,通过对船舶的状态参数进行循环迭代,计算出航次过程中能量消耗的连续变化。船舶任一时刻的状态参数都是用纵向速度u、横向速度v、艏摇速度r、经度坐标x、纬度坐标y、船舶航向ψ、主机转速n和舵角θ等8个变量表示的。
2.3能量耗散仿真模型
在建立系统数学模型后,还需对推进系统的各能量耗散因素进行计算分析。除了螺旋桨的效率造成的能量损失以外,其他能量损耗主要是由增阻造成的,这部分因素根据式(1)计算。
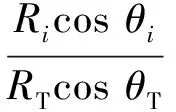
(1)
式(1)中:ERi为克服第i项阻力所消耗的能量;Ri为第i项阻力;θT为第i项阻力的方向与船舶运动方向的夹角;RT为船舶航行时受到的除螺旋桨推力以外的合力,包括静水阻力Rcalm、舵力Frudd和船舶漂角产生的水动力Fhydro;Fwind和Fwave[7-8]为因海况影响产生的环境干扰力;θT为作用于船体的总阻力与船舶运动方向的夹角;Eeff为船体受到的用来推动船体的能量。
根据以上数据模型和能耗分析公式,通过MATLAB/Simulink建立船舶推进系统的能量耗散仿真模型(见图4)。
3 实例分析
3.1实例数据

图4 船舶推进系统能量耗散仿真模型
选取载重量为46 000 t的原油/成品油船作为目标船,其总长182 m,型深17.8 m,型宽32.2 m,设计吃水10.5 m,主机型号6S50MC,额定功率9 840 kW,目标航线为香港—新加坡航线。
天气数据为ECMWF发布的再分析数据集中的ERA-Interim数据集。这里采用的海洋气象数据为2013年5月3日至5月8日18时的海面10 m处风场及波浪数据,每天有4组数据,网格精度为0.25°×0.25°。仿真时间内该海域的海况信息及航线见图5。
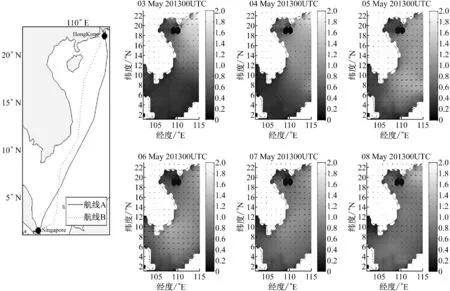
图5 仿真时间内该海域的海况信息及航线
3.2过程分析
在航线A整个仿真过程结束之后,可获得主机轴功率、各个能量耗散因素及航迹的历时曲线。对能量数据取0.5 h平均值,获得各因素能量耗散的历时值(见图6)。
1) 在仿真的1~18 h内,船舶处于较平静的海况下;同时风场方向和船舶航向基本相同。在该阶段,风浪对推进系统能量消耗的影响较小,Ewind为1.05%,Esea为0.22%;而固定能量消耗Ecalm和Eprop分别为56.44%及38.52%,占总能量消耗的94.96%;Erudd和Ehydro分别为1.57%及2.20%,且保持稳定。

图6 航线A能耗分析历时曲线
2) 在仿真的19~48 h内,风速和波浪逐渐升高。在该阶段,由于风、浪所耗散的能量处于逐步增加的态势且风浪导致的偏移力增大,导致航行漂角增大,船舶操舵更频繁,固定能量消耗从95%逐步下降至89.2%,Erudd上升20%,Ehydro上升33%,而Ewind大幅增加400%,Esea增加500%。
3) 在仿真的48~100 h内,船舶处于轻浪海况下。在该阶段,各类能量消耗所占比例基本保持稳定,Ecalm占41.53%,Eprop占46.84%,Erudd占1.51%,Ehydro占2.68%,Ewind占5.05%,Esea占2.38%。相比其他海况,该海况下固定能量消耗所占比例进一步降低,额外能量消耗上升至11.63%,这其中Erudd的比例不但没有上升,反而略有下降。
4) 在仿真的100 h之后,风力逐步减小,但此时根据设计航线,出现一个转向。在105 h之后出现顺风顺浪的情况,能量消耗大幅降低,Erudd和Ehydro基本消失;同时,由于速度的增加,Ecalm上升,Eprop下降。
静水阻力的大小受船体湿面积和船舶航速的影响,当船舶吃水一定时,Ecalm的大小由航速Vs决定。Eprop的影响因素主要是主机的输出功率和螺旋桨的推进效率,其中推进效率在实际计算过程中是根据进速系数J=Vs(1-w)/nD计算的。船舶航行时采用的是主机定转速的模式,因此航速对能量的总消耗和分布有最直接的影响。
在额外的能量消耗中,Erudd和Ehydro是船舶操纵及漂角导致的阻力增加,这2个因素不仅受海况影响,还与船舶操纵性及设计的航线对海况的适应程度有关;而Ewind和Esea则是由船舶自身的参数、海况及航线决定的。由于目标船为油船,因此其上层建筑的投影面积较小;对于其他类型的船舶而言,额外能量消耗的比例会进一步增加。
3.3航线分析
对航线A和航线B分别进行仿真,得到不同航线推进系统能量消耗统计见表1。
由表1可知:航线B的航程比航线A长,用时久;航线B的平均速度比航线A小1.3%,能量总消耗比航线A多2.8%。对比能量耗散的各个因素发现:由于航线A的主机转速设置与航线B相同,因此固定能量消耗的平均值基本相同。风浪对航线A的影响主要是增加船舶阻力,造成推进系统产生额外的能量消耗;对航线B的影响则是由其带来的偏移力、船舶漂角及为维持航线而进行的操舵动作导致产生能量消耗。

表1 不同航线推进系统能量消耗统计
4 结束语
结合船舶推进系统、船体运动和天气信息,在球面坐标系下建立船舶推进系统能量耗散模型。该模型可对整个航线进行仿真计算,获得各类耗散因素在推进系统输出能量中所占的比例。
由一个航次的完整仿真结果可知,对船舶能耗影响最大的是船舶航速,占86%~95%的能量消耗。风浪作为额外能量消耗因素,应在设计航线时尽可能地给予考虑,使船舶处于顺风顺浪状态。同时,操舵时应能保持船舶在小漂角下航行,在所使用的PID航线保持策略中,漂角和操舵导致的能量消耗占3.8%~4.2%。
采用推进系统能量耗散模型对航线设计进行分析,能预报航期及能量总消耗量。对航线中导致能量消耗增加的部分进行详细分析,可找到导致额外能量消耗增加的因素,从能量耗散的角度为航线优化提供理论依据。
[1] 中国船级社. 船舶能量消耗分布与节能指南:GD 18—2014[S]. 2014.
[2] SHI W, STAPERSMA D, GRIMMELIUS H. Simulation of the Influence of Ship Voyage Profiles on Exhaust Emissions[J]. Proceedings of ASME International Mechanical Engineering Congress and Exposition, 2008, 14:165-174.
[3] 严新平,李志雄,刘正林,等. 大型船舶推进系统与船体耦合动力学研究综述[J]. 船舶力学,2013,17(4):439-449.
[4] SHI W, GRIMMELIUS H T, STAPERSMA D. Analysis of Ship Propulsion System Behaviour and the Impact on Fuel Consumption[J]. International Shipbuilding Progress, 2010, 57(1):35-64.
[5] MYUNG-Il R. Determination of an Economical Shipping Route Considering the Effects of Sea State for Lower Fuel Consumption[J]. International Journal of Naval Architecture and Ocean Engineering, 2013, 5(2):246-262.
[6] 武晓光,张军峰,蒋海行. GRIB数据及其在航迹预测中的应用[J]. 航空计算技术,2013,43(6):59-62.
[7] 贾欣乐,杨盐生. 船舶运动数学模型——机理建模与辨识建模[M]. 大连:大连海事大学出版社, 1999.
[8] ISO. Ships and Marine Technology-Guidelines for the Assessment of Speed and Power Performance by Analysis of Speed Trial Data: ISO 15016[S]. 2002.
[9] 李通. 风翼助航系统对船舶柴油机动力扰动特性研究[D].大连:大连海事大学,2011.
[10] 李沁生,于家凤,徐静,等. 船舶航向计算动词PID自动舵设计[J]. 船电技术,2013,33(2):30-33.
[11] 张显库,蒋丹东,贾欣乐. 船舶自动舵的研究[J]. 大连海事大学学报,1997,23(1):9-13.
ModelingandAnalysisofEnergyConsumptionofShipPropulsionSystem
LIUYifan,ZHANGYuewen,SUNPeiting,LIUZhufeng
(Marine Engineering College, Dalian Marinetime University, Dalian 116026, China)
U664.14
A
2016-04-11
国家高技术研究发展计划(“八六三”计划)资助项目(2012AA112702)
刘伊凡(1988—),男,安徽太和人,博士生,主要研究方向为现代轮机管理。 E-mail: dayongdmu@163.com
1000-4653(2016)03-0031-04
