基于AIS的大型船舶靠泊航速分布规律
2016-10-12黄泽洋邵哲平潘家财纪贤标
黄泽洋, 邵哲平, 潘家财,2, 纪贤标,2, 马 峰
(1.集美大学 航海学院,福建 厦门 361021;2.厦门大学 信息科学与技术学院,福建 厦门 361011)
HUANG Zeyang1, SHAO Zheping1, PAN Jiacai1,2, JI Xianbiao1,2, MA Feng1
基于AIS的大型船舶靠泊航速分布规律
黄泽洋1, 邵哲平1, 潘家财1,2, 纪贤标1,2, 马 峰1
(1.集美大学 航海学院,福建 厦门 361021;2.厦门大学 信息科学与技术学院,福建 厦门 361011)
船载自动识别系统(Automatic Identification System, AIS)数据中蕴藏着大量海上交通特征,可从中获取潜在的、可反映船舶行为特征规律的信息。对此,基于AIS数据库,运用数据挖掘方法和中分纬度算法精确提取船舶靠泊特征。结合厦门嵩屿和天津北疆港区2014年全年的数据,深入分析大型集装箱船距离泊位20倍船长范围内的航速分布规律。研究结果既可为主管部门完善港内安全航速规定提供参考,亦可为船舶驾引人员提供靠泊阶段的航速控制依据。
水路运输;船载自动识别系统;大型船舶;靠泊航速;分布规律
HUANGZeyang1,SHAOZheping1,PANJiacai1,2,JIXianbiao1,2,MAFeng1
Abstract: Extracting the motion characteristics of berthing vessels from massive Automatic Identification System(AIS) data by combining the data mining technology and mid-latitude sailing method is proposed. The aproaching speed distribution law of large container ships when they are within the range of about 20 times of own ship length from the berth are identified based on whole data set of the year 2014, acquired in Xiamen Songyu port area and Tianjin Beijiang port area. The research may help the port authorities to define speed limits and help the pilots or officers to control vessels during berthing.
Keywords: waterway transportation; AIS; large vessel; berthing speed; distribution law
靠泊操纵是船舶进港航行的最后阶段,对于大型船舶而言,即使有拖船协助,操船人员依然会承受很大压力。因此,切实保障各类船舶(特别是各类大型船舶)安全靠泊尤为重要。
近些年,国内外相关学者围绕保障船舶安全靠泊开展的研究工作主要包括大型船舶靠泊操纵模拟[1-2]、 船舶大型化对靠泊安全的影响[3]及引领船舶安全靠泊的关键因素分析[4-6]等,很少对大型船舶靠泊航速变化的普遍规律进行研究。
文献[7]分析船舶进出港各阶段航速的分布。这里在此基础上,根据船载自动识别系统(Auto-matic Identification System, AIS)数据采集子系统[8]所接收的数据,利用大数据挖掘方法分析大型集装箱船靠泊航速的变化规律,重点对DL[7]处于[0,20]时的航速规律进行比较、归纳和总结,以期为主管机关完善港内安全航速的规定及船舶驾引人员制订靠泊操纵计划和安全靠泊提供参考。
1 大型船舶靠泊总体情况
1.1大型船舶靠泊的特点
大型船舶具有质量大、线型尺度大等特殊的结构特点,该特殊性使得靠泊操作的难度进一步提升。大型船舶靠泊时速度一般较低,空载时受风的影响较大,重载时受流的影响较大,同时还受浅水效应和窄水的影响,受力情况比较复杂。在上述条件下,操船者需根据本船的实际操纵性能,并结合当时靠泊的具体条件,制订周密的靠泊计划。
操船人员尤其应密切关注入泊的余速、船与码头间的横距及靠拢角度。通常在保证舵效的前提下,靠泊速度宜尽可能低,以避免长时间倒车或频繁用车;有经验的船长或引航员一般根据岸边目标的相对移动速度来判断靠泊余速的大小。
1.2大型船舶靠泊航速的定义
在航海学领域,船舶的航行速度可分为船速和航速2种,前者一般指船舶在无风流情况下的航行速度,而后者则是船舶在风流影响下相对海底的航行速度。[8]这里所研究的原始数据来自于AIS,故船舶航速均为考虑风、浪和流等影响因素的航速,即对地速度(Speed Over Ground, SOG)。
通过对大量的AIS数据进行研究发现,船长>300 m的大型集装箱船的航速一般从距离泊位约20倍船长处开始呈明显下降趋势,因此这里主要研究该阶段的航速分布情况。
2 船舶靠泊特征的提取算法
基于Microsoft SQL Server的AIS信息数据库是数据分析子系统[9]的主体,数据库中的AIS信息表(尤其是动态信息表)的数据量一般比较大,故应根据研究对象来筛取所需要的信息。[10]
2.1船舶到达距离模型设计
1)确定目标泊位所在码头的经纬度范围及目标船的船长范围,利用船舶海上移动通信业务标识码(Maritime Mobile Service Identity, MMSI)关联动态信息表和静态信息表,筛取各船舶航速稳定为0阶段所对应的第1个时刻点,将其定义为ST(Stop Time),并将结果存入到临时表A中。
2)以ST为索引,通过关联动态表和表A提取各船舶的经纬度数据(分别为BerthLong和BerthLat),将其定义为船舶最终靠泊位置(即泊位点),并将结果存入到临时表B中。
3)根据不同港口水域的具体环境确定船舶靠泊操纵过程的起算点经纬度,提取起算点与泊位点间的船舶AIS数据,将结果存入到靠泊表C中。
4)构建距离计算函数CalDist,并调用至靠泊表C中,计算任意时刻各船舶轨迹点与各自泊位点间的距离。在靠泊阶段,由于起算点至泊位点的航程较短,故考虑首先利用中分纬度算法(Mid-Latitude Sailing)[8]计算各船各自相邻航迹点间的航程,再累加求和,最终得到各船各自的剩余航程DDistToBerth。以计算某船靠泊过程中第Ai点与第Ai+1点间的航程为例,可得


(1)

假定某船靠泊轨迹为图1形式,计算起算点A1(φ1,λ1)与泊位点An(φn,λn)间的航程,可得
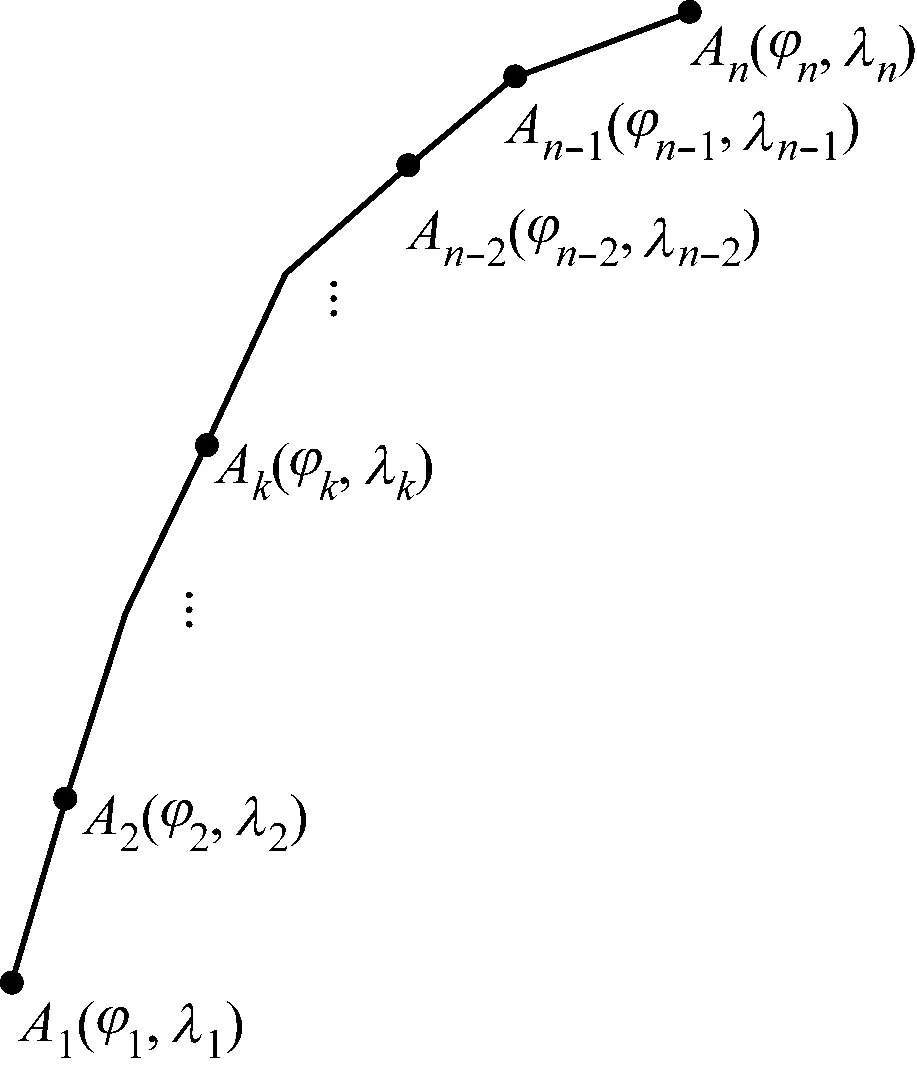
图1 某船靠泊轨迹
(2)
(3)
式(2)和式(3)中:各距离的单位均为n mile。为便于后续采用同类比较法分析数据规律,考虑对数据进行无量纲化处理,即利用船舶与靠泊泊位间的距离同自身船长的比值DL来度量。
(4)
式(4)中:DL为船舶与靠泊泊位间的距离同自身船长的比值;DDistToBerth为船舶与靠泊泊位间的距离,n mile;LOA为船舶总长,m。
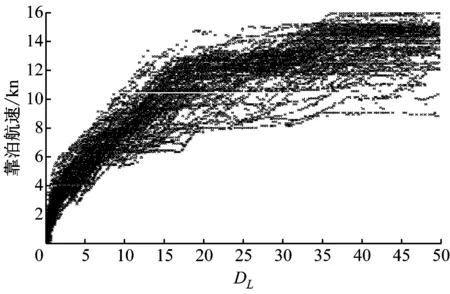
5)在进港靠泊过程中,由于大型集装箱船的操纵性能较好,一般在距离泊位的10 n mile时开始备车[11];为不失一般性,可将其认定为约50倍船长,即50DL。因此,对靠泊表C中的数据作进一步的筛选,使与泊位间的距离≤50DL。经过处理的部分结果展示见图2。
2.2曲线拟合和规律
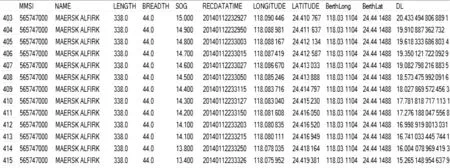
图2 经过处理的靠泊表C部分结果展示
将提取出的靠泊特征数据以离散点的形式呈现出来,结合船舶操纵特点及引航员的实践经验有针对性地分析不同港口条件下同种大型船舶的靠泊航速与剩余距离的关系,继而对靠泊航速递减阶段的数据进行有针对性的拟合。将散点图与已知函数曲线对比,选取最接近散点分布的曲线。这里考虑采用基于最小二乘的多项式回归预测方法[12-13],得到其回归方程和回归曲线。回归方程的一般形式为

(5)
再利用MATLAB生成曲线具有置信水平95%的预测区间(Prediction Interval)[14],该区间即为靠泊船航速分布区间。
3 实例
3.1研究范围和数据整理
为便于研究,利用已建立的船舶AIS信息服务平台,分别采集靠泊厦门嵩屿港区和天津北疆港区的船长>300 m的集装箱船舶AIS数据。嵩屿集装箱码头泊位范围选定为24°26′.48N~24°27′.03N,117°59′.52E~118°02′.26E;北疆集装箱码头泊位范围选定为38°58′.68N~39°00′.57N,117°46′.36E~117°47′.38E。AIS数据统计情况见表1,采集的时间范围是2014年1月1日—12月31日。
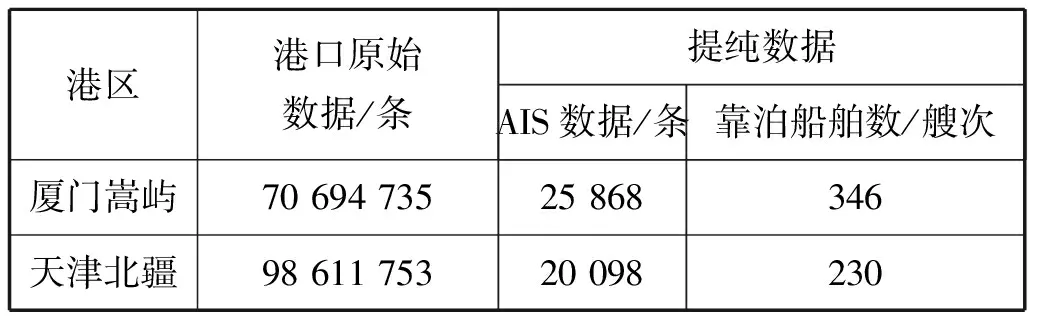
表1 AIS数据统计情况
3.2靠泊航速结果展示
靠泊嵩屿港区和北疆港区集装箱船的航速分布散点图见图3。
由图3a可知,靠泊嵩屿港区的集装箱船至距泊位约40DL处引航员登船,随后航行至距离泊位约20DL处其航速达到极大值,即该水域的航速上限15 kn;而图3b中,靠泊北疆港区的船舶在距离泊位约33DL处有小幅减速,当驶近至距离泊位20DL之后,其航速递减趋势与嵩屿港区具有明显的相似性。

a)嵩屿港区
b)北疆港区
3.3结果分析
根据上述相似性,拟组合研究两港区的靠泊航速分布,进一步分析大型集装箱船在20DL范围内的靠泊航速宏观规律(见图4),由航速分布得到靠泊航速分布表(见表2)。
一般大型集装箱船由全速前进至停车的过程中因惯性而前进的距离约为9.8DL。由图4可知,船舶即使航行至距离泊位约10DL处,其航速依然在8 kn左右。当船舶航行至距离泊位约1.5DL处时,航速呈骤降趋势,此时航速约为3 kn。大型集装箱船的方形系数CB较小,一般<0.68;单位载重吨分配的主机功率Pmax/mDW较大,一般>0.60;舵面积与船长、吃水比AR/(LPPd)一般>1/55。以上因素
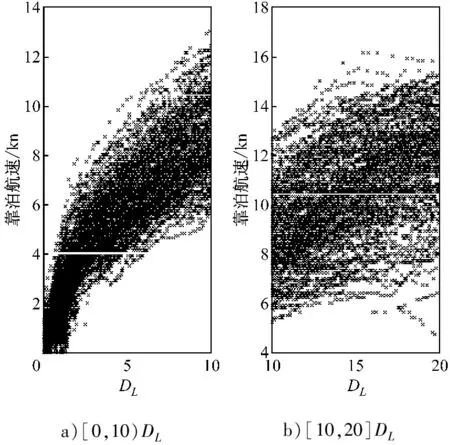
图4 大型集装箱船距泊位20DL范围内靠泊航速分布散点图

表2 大型集装箱船距泊位20DL范围内靠泊航速分布
综合作用,使得船舶的稳定性和停船性能好、舵效佳,加之船舶排水量大,故而其靠泊前应保持适当高的航速,以保证靠泊效率和舵效,同时兼顾安全性。
大型集装箱船靠泊的最后阶段,引航员将视情况选择合适的时机停车淌航。此阶段耗时相对较长,故单位区域内接收的AIS数据量大,0~2DL内离散点分布较密集。此外,引航员在必要时也会选择瞬间加车,以增加舵效。
3.4曲线拟合
综上所述,拟提取靠泊厦门嵩屿和天津北疆港区的集装箱船靠泊航速数据进行合并拟合,范围为0~20DL(见图5)。同时,得到靠泊航速分布(见式(6))。
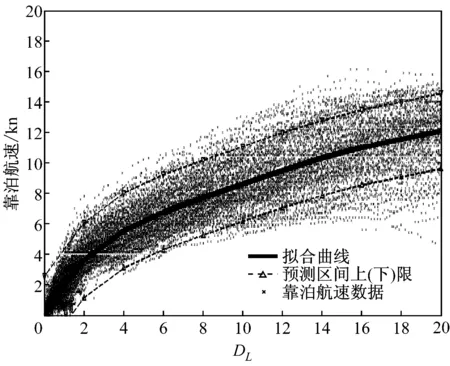
图5 船长>300 m集装箱船靠泊航速分布曲线拟合及其预测区间
(6)
根据拟合曲线和式(6)计算得到大型集装箱船舶靠泊建议航速及其方差(见表3)。该建议航速即1~20DL各自对应的平均航速。由此计算各自的方差,用以展示各样本航速相对建议航速的偏离程度。由表3可知,随着船舶逐渐靠近泊位,各船航速控制的差异性越来越小,尤其当船航行至8DL范围内以后方差较小,表明多数船舶的靠泊航速控制偏差较小,具有明显的一致性。
3.5结果验证
为验证上述靠泊建议航速的有效性和可操作性,将其应用于大连海事大学航海技术研究所研制的大型船舶操纵模拟器中。由4位持有船长适任证书的人员分别根据建议航速模拟靠泊厦门嵩屿港区。靠泊操作均较顺利,表明大型集装箱船参考该建议航速靠泊效果较好,该建议航速及航速分布规律在无明显弯头或弯头较少的水域具有普遍适用性。
表3 大型集装箱船舶靠泊建议航速及其方差
4 结束语
现有的港内航速的具体规定多来自于一般经验,缺乏有效的数据支持。研究发现,对大型船舶靠泊航速分布的宏观规律进行分析有助于主管部门更直观地了解水域内同一类型船舶的航速控制习惯,从而有针对性地完善安全航速的相关规定。同时,其还有利于船舶驾引人员统筹协调,正确运用车、舵、锚、缆、侧推器及拖船等助泊设备。
提出有效提取船舶靠泊特征的到达距离模型,探讨靠泊厦门嵩屿港区和天津北疆港区的大型集装箱船的靠泊航速规律,并结合船舶的操纵性能和引航员的实践经验对剩余距离约为20DL的航速递减阶段进行深入分析,由拟合结果得到船舶靠泊建议航速。这里仅就大型船舶靠泊航速规律展开讨论,靠泊角度的规律及风、浪、流等对航速和航向的影响将是下一步研究的重点。
[1] INOUE K, OKAZAKI T, MURAI K, et al. Fundament-al Study of Evaluation at Berthing Training for Pilot Trainees Using a Ship Maneuvering Simulator[J].TRANSNAV,2013,7(1):135-141.
[2] 刘轶华,肖英杰.基于大型船舶操纵模拟器的洋口港LNG船舶靠离泊风险评估[J].武汉理工大学学报,2014,38(2):290-293.
[3] 杨定照.集装箱大型化对靠泊安全的影响[J].航海技术,2011(2):8-10.
[4] 尤庆华,陈杰,胡甚平,等.集装箱船舶顺流靠泊风险评估与操作要领[J].中国航海,2013,36(4):143-146.
[5] 周世波,张宇.超大型集装箱船舶靠泊厦门港海沧1#泊位的安全操纵[J].航海技术,2014(3):1-4.
[6] HSU W K K. Assessing the Safety Factors of Ship Berth-ing Operations[J].The Journal of Navigation,2015, 68(3):576-588.
[7] 肖潇,邵哲平,纪贤标,等.基于AIS信息的船舶进出港航速控制模型[J].上海海事大学学报,2014,35(4):11-14.
[8] 郭禹.航海学[M].大连:大连海事大学出版社,2005:22.
[9] 邵哲平,孙腾达,潘家财,等.基于ECDIS和AIS的船舶综合信息服务系统的开发[J].中国航海,2007,30(2):30-33.
[10] JI Xianbiao, SHAO Zheping, PAN Jiacai, et al. A New AIS-Based Way to Conduct OLAP of Maritime Traffic Flow[C]. ASCE: Proceedings of ICTE, 2009: 3718-3723.
[11] 洪碧光.船舶操纵[M].大连:大连海事大学出版社,2008:131-132.
[12] 王岩,隋思涟.数理统计与MATLAB数据分析[M].2版.北京:清华大学出版社,2014:221-228.
[13] 许伦辉,傅惠.交通信息智能预测理论与方法[M].北京:科学出版社,2009:40-50.
[14] LAROSE D T.数据挖掘方法与模型[M].刘燕权,胡赛全,冯新平,等,译.北京:高等教育出版社,2011:52-57.
DistributionLawofLargeVesselBerthingSpeedBasedonAISData
(1.Navigation College, Jimei University, Xiamen 361021, China; 2. School of Information Science and Technology, Xiamen University, Xiamen 361011, China)
U675.921
A
2016-02-27
国家自然科学基金(51109090); 福建省自然科学基金(2015J01214)
黄泽洋(1991—),男,福建福州人,硕士生,从事交通信息工程及控制研究。E-mail:zyhuang0809@163.com
邵哲平(1964—),男,福建福州人,教授,船长,博士,从事交通信息工程及控制、航海技术研究。E-mail:zpshao@jmu.edu.cn
1000-4653(2016)02-0055-04
