基于蒙特卡洛方法的受限航道船舶交通拥塞仿真
2016-10-12杨旭刚刘克中
杨 星, 杨旭刚, 王 展, 刘克中,3, 李 键
(1. 武汉理工大学 航运学院, 武汉 430063; 2. 内河航运技术湖北省重点实验室, 武汉 430063;3. 国家水运安全工程技术研究中心, 武汉 430063)
YANG Xing1,2, YANG Xugang1,2, WANG Zhan1,2, LIU Kezhong1, 2, 3, LI Jian1,2
基于蒙特卡洛方法的受限航道船舶交通拥塞仿真
杨 星1,2, 杨旭刚1,2, 王 展1,2, 刘克中1,2,3, 李 键1,2
(1. 武汉理工大学 航运学院, 武汉 430063; 2. 内河航运技术湖北省重点实验室, 武汉 430063;3. 国家水运安全工程技术研究中心, 武汉 430063)
在分析受限航道船舶交通物理过程的基础上,提出受限水域船舶交通拥塞状态的若干表征参数。利用离散事件仿真思想,构建以“船舶到达-通过航道-船舶离开”为主要逻辑单元的受限航道船舶交通仿真模型,着重研究船舶在航道中航行时船舶间的速度干扰关系。基于蒙特卡洛的思想对受限航道船舶拥塞状态的演化过程进行仿真研究,探讨船舶交通拥塞状态与船舶航行特征之间的内在关联。
受限航道; 船舶交通; 拥塞度; 蒙特卡洛仿真
YANGXing1,2,YANGXugang1,2,WANGZhan1,2,LIUKezhong1, 2, 3,LIJian1,2
Abstract: Several characteristic parameters about marine traffic congestion in restricted waterway are proposed based on analyzing the physical process of marine traffic in restricted waters. The traffic simulation model in restricted waters,which takes the idea of vessel’s arrival,passing along and departure as the main logic unit,is proposed with the discrete event simulation theory. This model focuses on the velocity interference relationship between the vessels in restricted channels. Based on Mont Carlo simulation,the simulation research to the evolutionary process of marine traffic congestion status is conducted,and the intrinsic correlation between traffic congestion and character of ship motion is investigated.
Keywords: restricted waterway; marine traffic; congestion index; Monte Carlo simulation
通航安全和通航效率是船舶交通研究领域关注的重点[1-3],相关的信息主要通过船舶交通管理服务(Vessel Traffic Service, VTS)和船舶调度系统等方式获取[4]。然而,当前对船舶交通模式和特征的认识与道路交通、航空交通相比还存在很大差距,船舶交通管理和调度主要依赖于操作人员的工作经验及其主观判断,这也是制约水路交通智能化发展的核心瓶颈之一。[2, 5]
认识船舶交通模式和特征的核心基础是对船舶交通流特征进行准确描述。当前围绕船舶交通流开展的研究大体上可分为基于船舶交通静态特征的船舶流量计算与预测[6]和基于船舶交通动态特征的排队模型研究[7]。
1) 在基于船舶交通静态特征的船舶流量计算与预测方面,主要以船舶领域为基础,研究航道某一断面的船舶通过能力。此类方法通常假设航道尺度不对双向通航船舶的通过产生限制。
2) 在基于船舶交通动态特征的排队模型方面,主要通过研究船舶排队特征和参数(如排队队长、等待时间、等待概率等)来描述某一水域内的船舶通过能力,主要研究内容是服务模型和排队策略[4,8]。
上述2种方式主要从宏观层面考虑前后船舶之间的距离约束关系,未能从微观层面进一步考虑不同船舶的速度差异及前船对后船造成的干扰和影响。
这里在分析船舶通过受限单向航道的船舶交通物理过程的基础上,从微观层面的船-船速度干扰角度提出船舶交通流中的船舶减速致因机理,进而采用减速参数表征船舶交通拥塞状态,并通过蒙特卡洛仿真方法分析船舶交通拥塞状态与船舶减速参数之间的内在关联。
1 船舶交通拥塞机理分析
1.1受限航道船舶交通物理过程分析
船舶交通不同于道路交通,航行中的船舶(尤其是大型船舶)很少因交通密度过大而采取暂时停航措施或选择其他水道航行。随着国际海运的快速发展,沿岸航行船舶数量逐渐增多,沿岸受限航道承载的压力问题日益凸显,船舶交通在受限航道中所表现出的宏观或微观特征值得关注。
分析船舶通过单向受限航道的过程,可将其抽象为船舶到达、船舶通过航道、船舶驶离等3个阶段(见图1)。
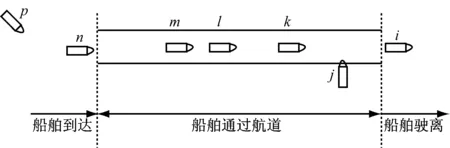
图1 船舶通过受限航道3阶段示意
1) 船舶到达航道阶段。该阶段涉及船舶类型、船舶尺寸及船舶到达时间间隔等多个参数,这些参数服从以下规律。
在航道入口,船舶不定时地到达,若称单位时间内到达航道口的船舶数量为船舶到达率(记作λ),则船舶到达航道入口这一事件服从参数为λ的泊松分布。由于泊松事件的时间间隔服从指数分布,因此船舶到达航道入口的时间间隔T服从参数为1/λ的指数分布,即:T~Exp(λ)。此外,船舶到达航道入口时的速度也服从一定的概率分布,对于每艘进入航道的船舶,其初始速度v服从参数为(μ,σ2)的正态分布,即v~N(μ,σ2)。
2) 船舶通过航道阶段。船舶在航道内航行时,往往在航道条件、附近船舶航行态势、异常干扰等因素影响下通过机动操作来消除碰撞风险,有序通过受限水域。在不考虑船舶追越的情况下,船舶会因速度差异而采取减速措施。例如图1所示的航道中,l船的航速小于m船,因两船间的距离小于安全间距,m船采取减速措施。除了受速度差异影响而减速之外,船舶还会因航道条件、周围船舶航行态势的限制而发生减速。船舶在浅水区航行,由于水深的限制,为减小深沉量而减速;在有其他船舶横穿航道时,本船也可能采取减速措施。
3) 船舶驶离阶段。船舶驶离航道之后通常被假设为进入开阔水域,船舶呈现不受水域约束的自由航行状态并按照避碰规则进行避让操作。
1.2受限航道船舶航行状态变化分析
船舶在受限航道内航行时,会因附近航行船舶或前方航道通航状态的影响而存在多种可能的状态,且不同状态之间会发生转移(见图2)。
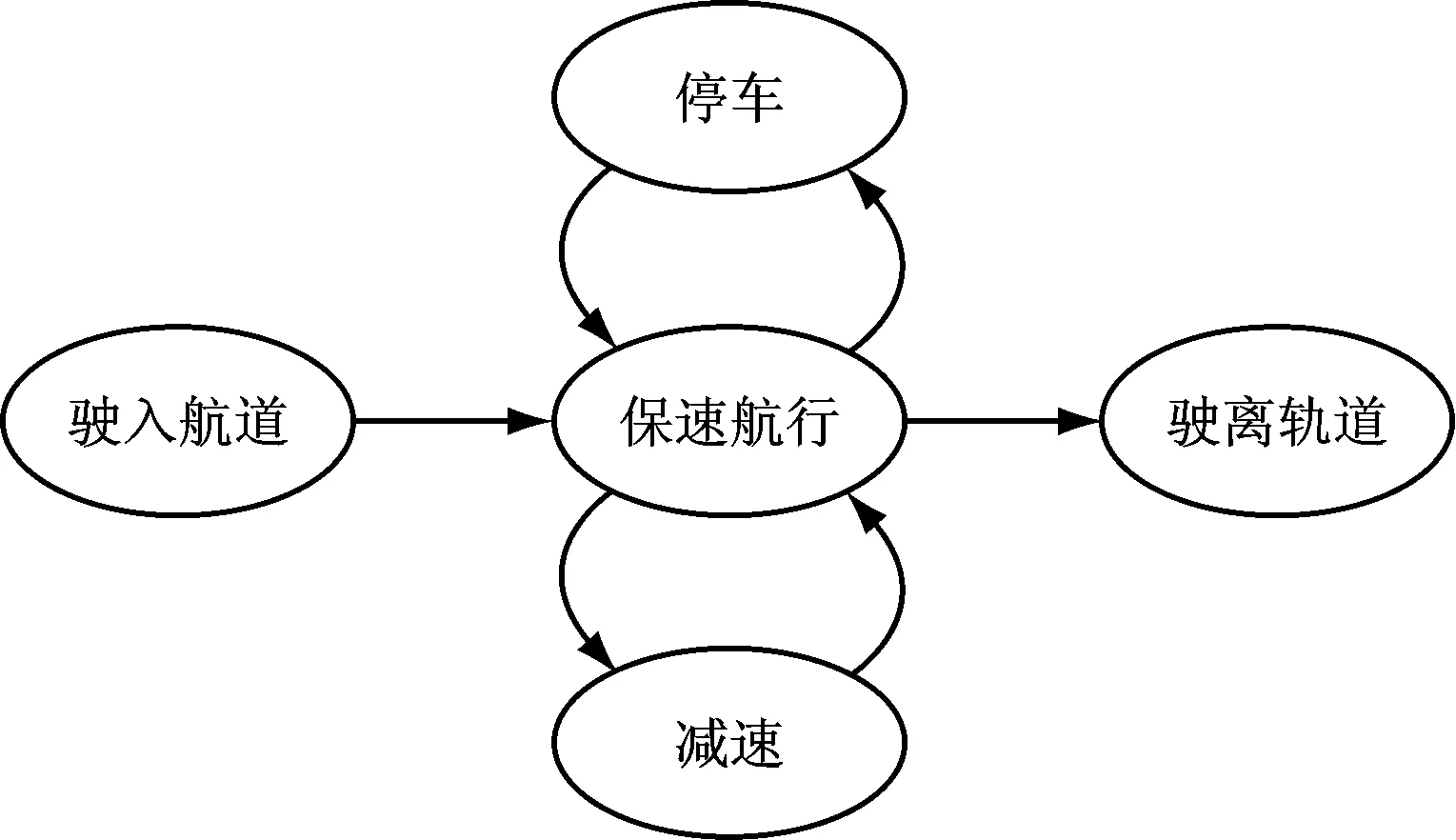
图2 航道内船舶状态转移关系
1) 在航道通畅的情况下,船舶会以当前的航速匀速通过航道。如图2所示,船舶依次经历驶入航道、保速航行和驶离航道等3个阶段,这实际上是一个无变化的航行状态。
2) 在实际通航过程中,船舶往往会遇到多种交通局面,由此产生的直接影响是船舶航速发生变化,该变化即为船舶航行状态的改变。
船舶航速变化后,船舶会进入减速状态或停车状态,这2种状态与船舶匀速航行状态之间构成船舶的状态变化关系。航道中的船舶在受到前船航速影响或附近船舶及环境条件影响时,会进入减速或停车状态,影响消失时恢复匀速航行状态。每艘船舶都循环往复该过程,从而构成航道内的船舶航行状态变化过程。
2 受限航道船舶拥塞仿真模型
2.1仿真框架
受限航道船舶拥塞仿真模型由参数设置与初始化模块、态势判断与决策模块及输出与存储模块等3部分组成。图3为船舶交通流系统仿真框架,3个模块相互关联,依托船舶交通的物理过程构成一个整体。

图3 船舶交通流系统仿真框架
1) 参数设置与初始化模块是模型的准备阶段,主要完成仿真参数的输入。为生成服从一定规律的船舶交通流,输入的参数包括船舶到达率、船舶速度分布及船舶类型。此外,还输入航道参数及环境参数,形成船舶航行的外部环境。
2) 船舶态势判断与决策模块包括判断和决策2个方面的内容。首先在已形成的外部环境条件的影响下,依据船舶领域模型及船间干扰模型对当前的船舶交通状态进行判断;随后根据不同的状态做出不同的机动反应。若与前船的间距小于船舶安全间距,则要采取减速措施;若前方出现障碍物,则要采取改向措施。决策应以保证船舶安全航行为前提,采取合适的措施。
3) 输出与存储模块要完成数据的输出和存储2项功能。船舶机动操作后,首先输出船舶的位置信息、航速变化信息并加以存储;然后反馈船舶信息,对航速变化后的船舶交通态势进行新的判断,直至船舶驶出航道;最后将船舶初始参数一并储存,形成完整的数据存储系统。
2.2受限航道船间干扰模型
受限航道的船间干扰是指船舶在航道内正常航行时,为保证与前船之间必要的安全间距而必须采取的减速操作的情况。从实际情况看,船舶类型、船舶吨位、通航环境及天气状况(包括海况)均会给受限航道内前后相邻船舶之间的安全间距大小带来影响。考虑到所研究的船舶交通流特征属于宏观层面范畴,为保证描述的简便性,可将传统的船舶领域引入到受限航道中的船间干扰模型中进行建模。
图4为船舶间干扰关系示意,船舶j的航速vj大于前船i的航速vi,当船舶j行驶至与前船i的距离小于设定的安全间距时,出于安全考虑,船舶j必须减速至vj≤vi。同理,若减速后的船舶j的航速小于船舶k的航速,同样存在船舶j对船舶k造成航行干扰的可能。即当船舶k与船舶j之间的距离小于设定的安全间距时,船舶k同样需采取减速措施来保证船舶安全航行。上述船舶i引起船舶j减速,进而引起船舶k减速的情况表明,船舶间的干扰关系可扩展至连续多船情形。

图4 船舶间干扰关系示意
受限航道船舶干扰过程的伪码描述如下。
1) 输入:船舶到达率λ;船舶初始速度v0;航道参数;船舶的安全间距D;模拟时长T。
2) 输出:船船减速后的速度v;船舶减速时所行驶的距离d。
dt←本船在时刻t所处的航道位置

vt←本船在时刻t的速度
vf←前船在时刻t的速度
updatevt,vt=vf/*本船速度更新至与前船保持一致*/
Else
keep current speed
End
updatedt,dt=dt+vt*△t/*△t为状态更新的时间间隔*/
2.3船舶交通拥塞度参数
根据上述对船间干扰模型的分析,可认为船舶因受前船距离约束而采取的减速措施造成船舶拥塞。当所有船舶均无减速地通过航道时,可认为航道不存在交通拥塞现象。基于此,提出减速船舶数量比、船舶减速幅度比及船舶减速相对距离与航道长度比等3个表征受限航道船舶交通拥塞状态的参数,具体参数意义描述如下。
1) 减速船舶数量比:指一段时间内航道中发生减速的船舶的数量N0与航道中通过的船舶总数量N的比值(N0/N)。当该值较小时,可认为航道处于通畅状态;当该值增大到某个可接受的临界值时,航道进入拥塞状态。
2) 船舶减速幅度比:船舶减速幅度是船舶减速过程航速降低的大小△v,减速幅度比是减速幅度与船舶减速前的航速的比值△v/v。对于航道而言,单船的减速幅度意义不大,因此该参数是对在一段时间航道内的所有船舶而言的。统计每艘船舶的减速幅度(没发生减速的记为0),可得船舶减速幅度比的表达式为Σ△vi/Nvi。
3) 船舶减速相对距离与航道长度比:船舶减速相对距离d指船舶发生减速时所处的航道位置与航道起点间的距离(船舶没发生减速,该距离记为0);一段时间内航道内船舶减速相对距离与航道长度比的表达式为Σdi/NL。该比值表征的是船舶对其后面船舶影响的持续性。船舶在航道口减速与在临近航道终点处减速意义显然不同,进入航道后很快发生减速,则在整个行驶过程中都受前船航速的制约;而在临近航道终点减速,由于即将驶离航道,此时可认为船舶受减速影响很小。
3 仿真试验与结果分析
3.1试验参数设置
试验模拟的是一段时间内长度为L,宽度受限的直航道的船舶交通。对于这样一个交通过程,有很多参数会对航道的拥塞状态产生影响,试验中将船舶的到达率λ,船速分布的均值μ,标准差σ及航道的长度L等4个参数作为主要参数来考虑。
船舶到达率决定单位时间到达航道的船舶数量,船速分布决定船舶到达航道时的航速,航道长度则影响船舶在航道中行驶的时间。船舶到达航道越频繁、航速差异越大,在航行过程中发生减速的概率就越大;航道长度越长,则船舶发生减速后在减速影响下行驶的距离就越长。因此,所取的4个参数对航道拥塞存在一定影响。
对这4个参数,试验分4组进行,表1为4组试验的参数设置,每组试验都取1个参数作为变量,随该值的变化进行多次试验。除了上述变量之外,试验中其他必要参数设置为:每次试验模拟的时长为30 d;船舶进行减速判定的安全间距设定为1 800 m。
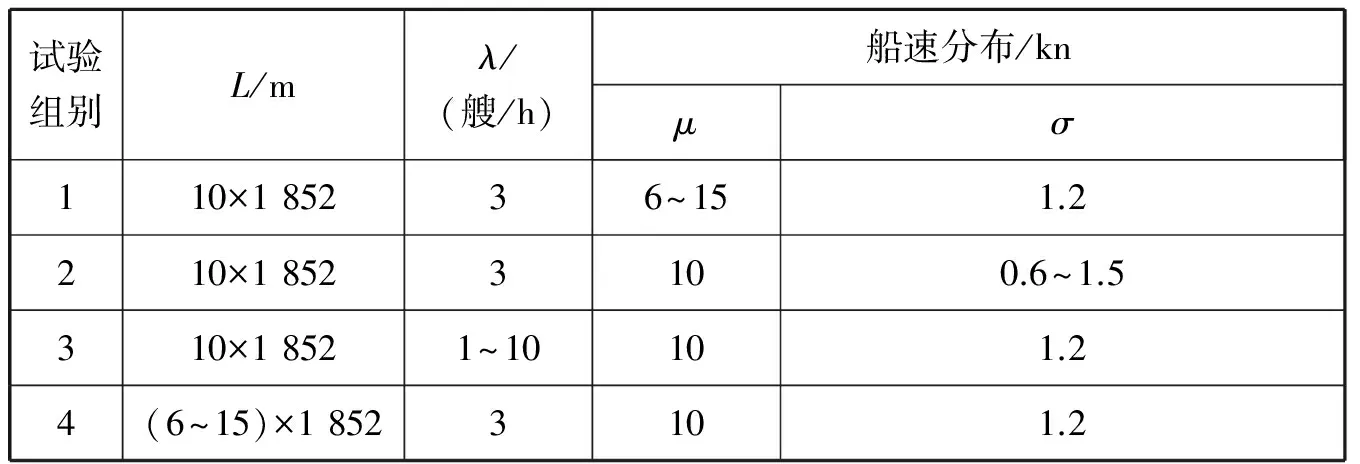
表1 试验参数设置
3.2试验结果输出及分析
对每次试验得到的数据进行汇总筛选,对其中减速船舶的数据进行分析,计算出模拟时间内航道中的减速船舶数量比、船舶减速幅度比及船舶减速相对距离与航道长度比。将计算的结果绘制成相关关系图(见图5~图8),图中的个别跳跃点为试验的误差点。考虑到试验结果具有一定的随机性,认为这些误差点的出现是合理的。下面根据曲线整体的变化趋势来分析航道拥塞表征参数与试验参数间的关系。

图5 航道拥塞表征参数与船舶平均航速关系
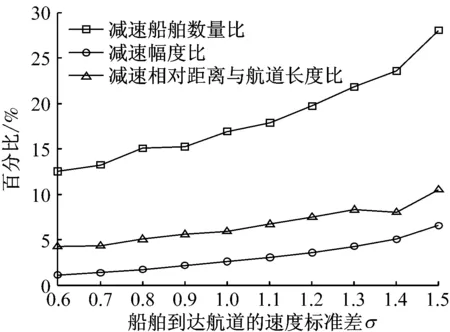
图6 航道拥塞表征参数与船舶速度分布标准差关系

图7 航道拥塞表征参数与船舶到达率关系

图8 航道拥塞表征参数与航道长度关系
由图5~图8可知:当船舶平均航速增大时,航道拥塞的3个表征参数均呈减小趋势,即航道畅通性增强;当船舶到达航道的航速分布标准差、船舶到达率及航道长度等3个试验参数增大时,航道拥塞的3个表征参数都一致增大,即航道的畅通性降低。由此可见,航道拥塞表征参数与试验参数间具有一致相关性。由曲线的上升、下降趋势可看出,增大船舶的航速、降低船舶间的航速差异、保证较低的船舶到达率及缩短航道长度能降低航道的拥塞程度。
对于一个受限航道的船舶交通,假设减速船舶总数不超过船舶总数的20%为可接受的范围,则结合图中结果,将对应的试验变量取值为:船舶航速为10 kn;船舶航速分布标准差为1.2;船舶到达率为3艘/h;航道长度为10 n mile。该结果表明:在实际航行过程中,要使航道内的船舶尽可能少地减速,减轻航道的拥塞程度,应控制船舶航速分布、船舶到达率及航道长度在合理的范围内。例如,对于船舶航速,应尽可能保持在10 kn以上,船舶航速分布标准差应<1.2。
4 结束语
分析受限航道船舶交通的物理过程,将其分为船舶到达、船舶通过航道和船舶驶离等3个阶段,对这3个阶段的船舶交通规律进行一般性的探讨,最终提取受限航道船舶拥塞的一些表征参数。为研究这些表征参数,建立仿真模型的框架,并详细分析船舶间的干扰关系,最后设计蒙特卡洛试验,模拟船舶通过受限航道的物理过程。通过改变试验参数,得出航道拥塞表征参数与试验参数之间的变化关系图;对试验结果图进行分析,得出航道拥塞表征参数随试验参数的变化趋势,从而得出改变试验参数对航道拥塞程度的影响。对减速船舶数量比进行定量分析,得出减少减速船舶数量的试验变量的合理取值范围。
[1] HASEGAWA K, TASHIRO G, KIRITANI S, et al. Intelligent Marine Traffic Simulator for Congested Waterways [C]. 7th IEEE International Conference on Methods and Models in Automation and Robotics,2001: 632-636.
[2] FILIPOWICZ W. Vessel Traffic Control Problems [J]. Journal of Navigation, 2004, 57(1): 15-24.
[3] 杨星,李键,陈巍博,等. 内河船舶交通流建模与仿真研究[J]. 中国航海,2013,36(3):80-85.

[5] 刘克中,张子昱,吕正祥,等.基于时间区分服务模型的航道交通流仿真[J].中国航海,2014,37(2):53-57.
[6] YEO G T, ROE M, SOAK S M. Evaluation of the Marine Traffic Congestion of North Harbor in Busan Port [J]. Journal of Waterway, Port, Coastal, and Ocean Engineering, 2007, 133(2): 87-93.
[8] 蔡学龙, 刘克中, 杨星,等. 内河航道交汇水域交通流仿真[J].大连海事大学学报,2012,38(2):19-21.
MarineTrafficSimulationofCongestioninRestrictedWaterwaywithMontCarloMethod
(1. School of Navigation, Wuhan University of Technology, Wuhan 430063, China; 2. Hubei Key Laboratory of Inland Shipping Technology, Wuhan 430063, China; 3. National Engineering Research Center for Water Transport Safety, Wuhan 430063, China)
U675.52
A
2016-05-11
国家自然科学基金(51479157);中央高校基本科研业务费资助(WUT-2014-zy-143; WUT-2015-HY-B1-10)
杨 星(1964—), 男, 湖北随县人,教授,硕士生导师,从事水上交通安全方面的研究。E-mail: xyang@whut.edu.cn
1000-4653(2016)02-0040-05
