飞翼无人机进舰下滑纵向固有模态特性研究
2016-10-12王允良陈志刚
张 旭,韩 维,王允良,陈志刚
(海军航空工程学院a.研究生管理大队;b.飞行器工程系,山东烟台264001)
飞翼无人机进舰下滑纵向固有模态特性研究
张旭a,韩维b,王允良b,陈志刚b
(海军航空工程学院a.研究生管理大队;b.飞行器工程系,山东烟台264001)
针对舰载飞翼布局无人机与常规布局飞行器不同的气动外形,建立无人机飞行状态下附近流场的网格模型,并计算了该型无人机的气动参数。基于插值函数计算得出该型无人机的升力系数、阻力系数和俯仰力矩系数对于迎角变化的曲线。建立纵向小扰动方程进行仿真计算,求解出该型无人机在进舰下滑状态时的固有模态特性。计算结果表明,该模型在配平条件下可用于舰载飞翼布局无人机的着舰气动适配性研究。
飞翼无人机;进舰下滑;固有模态
飞翼布局在风洞试验中具有很强的气动优势,虽然早期飞翼样机拥有不错的性能潜力,但飞翼布局飞机却存在安定性不佳和控制难度大的问题,严重影响了飞翼布局飞机的发展[1]。无人机着舰时会有很多制约因素,如滑跑距离、舰面运动、侧向风、垂直风等。近年来,美国研制的X-47B飞翼布局无人机已成功进行着舰试飞。X-47B是为美国海军无人作战空中系统验证(UCAS-D)项目而开发的无人验证机,主要是用来演示隐身飞翼布局无人机适应航母环境的能力[2]。
本文根据一些已知的X-47B数据,通过仿真计算获得该类型飞翼布局无人机的气动参数,并对其纵向固有模态特性进行研究和分析。
1 飞行动力学建模

舰载无人机在进行着舰下滑时,理想状态为定常直线飞行,本文主要研究无人机纵向运动,在“航迹—机体”坐标系中[3],忽略横向扰动运动变量,可以得到无人机的平衡方程:式(1)中:v是无人机飞行速度;T是发动机推力;α是迎角;φ是发动机安装角;D是阻力;m是无人机质量;γ是航迹倾角;L是升力;M是俯仰力矩;q是俯仰角速度;H是高度;Iy为无人机对应y轴的惯性矩。
根据小扰动原理及相关假设,用矩阵形式表示出小扰动方程:

同时,算例无人机的飞行状态参数部分参考战斗机[4]飞行高度为海平面高度;速度v0=50 m/s;基准航迹角γ0=-3.12°;配平迎角α=4.98°。
2 模态特性研究
本文首先采用ICEM建立无人机网格,见图1。

图1 无人机网格模型Fig.1 Mesh model of UAV
由于没有无人机具体的外形参数,因而自行设定了无人机外边缘。利用Fluent软件计算出该无人机以50 m/s速度飞行时,迎角变化对应的各项参数。
其中,参数主要为升力系数、阻力系数和俯仰力矩系数对于迎角变化产生的变化规律。同时,给出参考文献[5]中给出的计算和实验数据,如图2~4所示。

图2 升力系数随迎角的变化曲线Fig.2 Lift coefficient curve along with the change of angle of attack
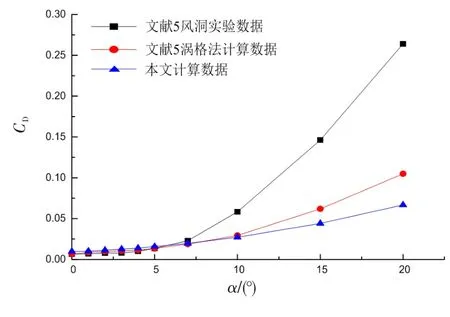
图3 阻力系数随迎角的变化曲线Fig.3 Drag coefficient curve along with the change of angle of attack

图4 俯仰力矩系数随迎角的变化曲线Fig.4 Pitching moment coefficient curve along with the change of angle of attack
从图2~4中可以看出,在迎角处于0°至7°变化范围内,仿真数据与实验数据基本相同。当迎角大于7°时,阻力系数随迎角变化的仿真数据与风洞试验测量的数据相差较大,而其他2组变化量仍基本相符。因此,利用Fluent计算出该无人机的参数比较可信。
根据飞行力学的经典理论,飞机的纵向运动都是由长周期模态和短周期模态组成的,模态特性可由状态方程中矩阵A的特征根决定[6-8]。其中,矩阵A是通过计算得出,气动参数主要是参考文献[9]以及通过CFD计算得出:
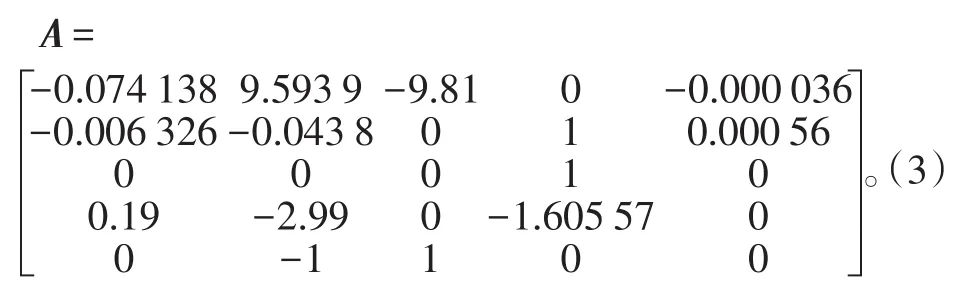
矩阵 A的特征根分别为:λ1=-0.001,λ2,3=-0.825 5±1.534 3i,λ4,5=-0.036 2±0.294 5i。通过计算可得到算例无人机的模态特性见表1。

表1 飞翼布局无人机算例状态下纵向模态的自然频率和阻尼比Tab.1 Longitudinal modal natural frequency and damping ratio of flying-wing UAV operators under state cases
经查阅资料,可获得美国军用飞行品质规范中关于有人机及飞行阶段的分类[10],参考有人机的分类以及在文献[11-12]中获得的对无人机进行分类信息。本文采用的算例飞翼布局无人机为高机动性无人机,即第Ⅳ类;飞行阶段为缓和机动,准确轨迹控制,如起飞、复飞、着陆阶段等(C种)飞行阶段。对第Ⅳ类C种飞行阶段条件下无人机的飞行品质要求如下[13-14]:
1)长周期运动:一级飞行品质要求ξn,p≥0.04;
2)短周期运动:一级飞行品质要求0.35≤ξn,sp≤1.30。
由此可见:算例无人机固有特性不满足一级飞行品质。
矩阵A的特征根中,λ1=-0.001对应高度模态,这个根很小,可以忽略,对算例无人机的动态特性几乎没有影响。算例无人机的长、短周期运动的自然频率分别为0.249 1Hz和1.894 5Hz相差不到10倍,参考文献[13]中特别指出:将飞机纵向运动划分为长周期运动模态和短周期运动模态的理论基础为2个模态的自然频率之间相差10倍,如果二者分得不是很开,那么该种类无人机多为重心位置很靠后的无人机和多数短距起落无人机,而且军标中的某些近似以及有关规定就不再适用。而短距起落无人机,静稳定性很低。
3 对单位升降舵阶跃输入的响应
在其他控制量不变的情况下,10 s时升降舵输入阶跃1°,即δe从0°变化为1°,并保持到t=100 s时,算例无人机的动态响应如图5~12所示。
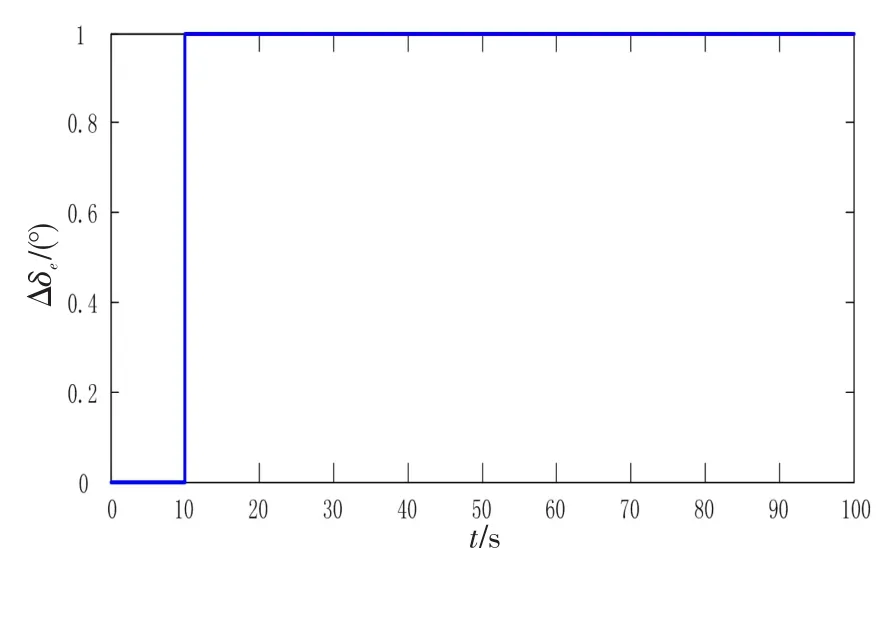
图5 升降舵阶跃输入1°Fig.51°step-input of elevator

图6 无人机高度扰动响应Fig.6 Height response of UAV

图7 无人机航迹倾角响应Fig.7 Track angle response of UAV

图8 无人机迎角响应Fig.8 Attack angle response of UAV
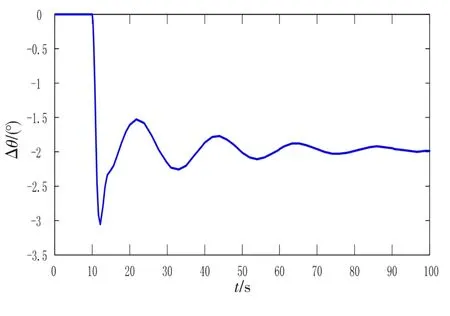
图9 无人机俯仰角响应Fig.9 Pitch angle response of UAV

图10 无人机俯仰角速度响应Fig.10 Pitch rate response of UAV

图11 无人机速度响应Fig.11 Velocity response of UAV

图12 无人机法向过载响应Fig.12nzresponse of UAV
从图6中可知,在10 s时,升降舵下偏1°的情况下,无人机飞行高度变化量为负值,说明无人机飞行高度开始降低,大约在28 s时达到最低点,然后高度开始升高,最后呈现出振荡上升的趋势;与无人机高度密切相关的航迹倾角变化量也先减小后增加,经过一段时间的振荡后,最终稳定在0°以上。如图7所示,此时航迹倾角大于初始航迹倾角,同时高度增加。
从图8~10中可以看出,自然频率较大的根对应的短周期模态运动。而与长周期模态有关的航迹倾角和速度响应振荡衰减较慢,周期约30 s左右,这可由图7、11中可以看到。无人机速度也变化较小,最终比初始速度快0.16 m/s左右的新稳定速度处上下振荡,如图11所示。
在无人机升降舵下偏1°时对应的是俯冲响应,无人机虽然开始是向下飞行的状态,但经过一段时间后,便开始转变为上升状态,最终呈现上升的趋势,这与通常情况存在差异,而这种状态正是所谓的“空速不稳定性”状态,即速度“反区”[15],出现这种情况,就是由于无人机速度低于最小阻力空速。如何解释产生这种“空速不稳定”现象的主要原因,就要从无人机的升阻特性和力的平衡来研究。可以看出,状态方程的根都具有负的实部,这对上述现象给予了充分的说明。但是,在以低速下滑这个阶段内,通过单独改变升降舵位置是无法保证无人机平稳下滑的[16]。而这种现象并不能说明无人机是不稳定的,如果在没有改变输入量的情况下,无人机在这个下滑阶段内完全可以稳定飞行。下面通过对公式的研究,来对这种现象进行分析。
由小扰动方程可知:

因为油门杆不动,ΔT=0,所以:
4 飞翼布局无人机与常规布局飞机的对比
取某常规布局飞机为例,计算出以上的部分响应与飞翼布局无人机进行对比。如图13所示,飞翼布局无人机的高度扰动量远远小于常规布局飞机。图14中,同样可发现飞翼布局无人机的航迹倾角扰动量远远小于常规布局飞机。导致这种情况发生的根本原因是飞翼布局无人机没有尾翼,其升降舵直接安装在机翼尾部。且一般飞翼布局无人机长度较常规布局飞机要短,使升降舵偏转时产生力到重心的距离更小,所以升降舵偏转相同角度时,飞翼布局无人机产生的力矩要小很多,最终才会得到图3、4的对比。

图13 高度扰动响应对比图Fig.13 Response contrast diagram of high disturbance

图14 航迹倾角响应对比图Fig.14 Response contrast diagram of track disturbance
5 结论
本文对飞翼布局无人机进舰下滑过程进行仿真进算,经过分析得出以下结论。
1)通过对该算例无人机模态特性的研究发现,算例无人机的模态特性中长、短周期运动对应的根比较相近,这是由于算例无人机静稳定性较低造成的,属于短距起降飞机的特点。
2)通过分析算例无人机的升降舵阶跃输入的响应:在进舰下滑阶段,由于无人机速度非常低,舰载无人机处于“速度反区”,使得改变升降舵不能直接获得需要的航迹,最终导致单独改变升降舵偏角是无法保持飞机的航迹的。这是舰载飞机进舰着舰的共同特点。
3)通过计算得出2类飞机的参数变化对比曲线,可以看出飞翼布局无人机的纵向操纵性要比常规布局飞机差很多。在接下来的研究过程中要充分考虑该类型无人机纵向操纵性差的实际情况。
在经过以上的分析之后,该算例无人机的参数将会为下一步研究着舰性能提供依据,便于后续研究的展开。
[1]逆火.飞翼无人攻击机的技术发展谈[J].海陆空惯性世界,2013(9):26-34. NI HUO.Technical development of flying-wing UCAV [J].Naas&Inertial Technology,2013(9):26-34.(in Chinese)
[2]谢文娇.X-47B或将开启舰载无人机的新时代[J].国际航空,2013(7):48-51. XIE WENJIAO.X-47B bring new era to carrier-based uav [J].InternationalAviation,2013(7):48-51.(in Chinese)
[3]韩维,王庆官.航母与舰载机概论[M].烟台:海军航空工程学院,2009:185-189. HAN WEI,WANG QINGGUAN.Introduction to the aircraft&carrier[M].Yantai:Naval Aeronautical and Astronautical University,2009:185-189.(in Chinese)
[4]SUBRAH MANYAM M B.H∞design of F/A-18A automatic carrier landing systems[J].Journal of Guidance,Control and Dynamics,1994,17(l):53-58.
[5]宋磊,杨华,解静峰,等.基于改进涡格法的飞翼布局飞机稳定性导数计算[J].南京航空航天大学学报,2014,46(6):457-462. SONG LEI,YANG HUA,XIE JINGFENG,et al.Predicting stability derivatives of flying wing aircraft based on improved vortex lattice method[J].Journal of Nanjing University of Aeronautics&Astronautics,2014,46(6):457-462.(in Chinese)
[6]方振平,陈万春,张曙光.航空飞行器飞行动力学[M].北京:北京航空航天大学出版社,2005(11):289-300. FANG ZHENPING,CHEN WANCHUN,ZHANG SHUGUANG.Aviation aircraft flight dynamics[M].Beijing:Beihang University Press,2005(11):289-300.(in Chinese)
[7]胡兆丰,何植岱,高浩.飞行动力学:飞机的稳定性和操纵性[M].北京:国防工业出版社,1985:38-39. HU ZHAOFENG,HE ZHIDAI,GAO HAO.Flight dynamics:stability and control of aircraft[M].Beijing:National Defense Industry Press,1985:38-39.(in Chinese)
[8]国防科工委航空气动力协作攻关办公室.飞机飞行品质标准和手册[K].西安:飞行力学编辑部,1992:39-41. NATIONAL DEFENSE AVIATION AERODYNAMICS COLLABORATIVE RESEARCH OFFICE.Aircraft quality standards and manuals[K].Xi’an:Flight Mechanics,1992:39-41.(in Chinese)
[9]彭兢,金长江.舰载飞机进舰着舰的自动引导和控制研究[D].北京:北京航空航天大学,2001. PENG JING,JIN CHANGJIANG.Approach and Landing aircraft carrier automatic guidance and control research [D].Beijing:Beihang University,2001.(in Chinese)
[10]航空工业部六三〇研究所.GJB MIL-F-8785C军用有人驾驶飞机的飞行品质[S].西安:飞行力学编辑部,1982. THE 630thRESEARCH INSTITUTE OF THE MINISTRY OF AVIATION INDUSTRY.GJB MIL-F-8785C Military Specification-manned aircraft flying qualities[S]. Xi’an:Flight Dynamics,1982.(in Chinese)
[11]戴宁,杨晖.无人机飞行品质规范浅析[J].飞行力学,2005,23(4):13-15. DAI NING,YANG HUI.Handing qualities outlook for UAVs[J].Flight Dynamics,2005,23(4):13-15.(in Chinese)
[12]陶于金,王建培.无人机飞行品质标准研究[J].飞行力学,2010,28(1):13-15. TAO YUJIN,WANG JIANPEI.Research on flying qualities criteria of the unmanned aerial vehicle[J].Flight Dynamics,2010,28(1):13-15.(in Chinese)
[13]国防科学技术委员会.GJB 185-86有人驾驶飞机(固定翼)飞行品质[S].西安:飞行力学编辑部,1986. GJB 185-86 Manned aircraft(fixed wing)flying qualities[S].Xi’an:Flight Dynamics,1986.(in Chinese)
[14]文传源,王瑛.现代飞行控制[M].北京:北京航空航天大学出版社,2004:66-69. WEN CHUANYUAN,WANG YING.Modern flight control[M].Beijing:Beihang University Press,2004:66-69.(in Chinese)
[15]鲁道夫·布罗克豪斯.飞行控制[M].金长江,译.北京:国防工业出版社,1999:73-76. RUDOLFBROCKHAUS.Flightcontrol[M].JINCHANGJIANG,Translated.Beijing:National Defense Industry Press,1999:73-76.(in Chinese)
[16]范晔,袁锁中.着舰状态飞行员控制策略研究[J].飞行力学,2008,26(3):37-40. FAN YE,YUAN SUOZHONG.Strategies for pilots landing state control[J].Flight Dynamics,2008,26(3):37-40.(in Chinese)
[17]DRINKWATER F J,GEORGE E C.A flight evaluation of the factors which influence the selection of landing approach speeds[R].Nasa-memo,1958,10(6):195-199.(in Chinese)
Intrinsic Mode Characteristic Research on the Flying-Wing UAV During Carrier Landing
ZHANG Xua,HAN Weib,WANG Yunliangb,CHEN Zhigangb
(Naval Aeronautical and Astronautical University a.Graduate Students’Brigade;b.Department of Airborne Vehicle Engineering,Yantai Shandong 264001,China)
A grid model of flow field around UAV flying was established for the flying-wing configuration different from the conventional configuration aerodynamic shape,and the UAV aerodynamic parameters could be calculated.The lift coefficient,drag coefficient and pitching moment coefficients for angles of attack curve of the UAV by was got the interpolation function.The equation of longitudinal direction small-disturbance motion could be simulated,and the natural mode feature of the flying-wing UAV was solved when the UAV was during in carrier landing.The results of the calculation showed that the model could be used in a simulation research of a carrier landing pneumatic suitability of carrier flying-wing UAV under trimmed condition.
flying-wing UAV;during carrier landing;intrinsic mode
V249.1
A
1673-1522(2016)04-0461-06
10.7682/j.issn.1673-1522.2016.04.010
2016-04-30;
2016-06-07
航空科学基金资助项目(20145784010)
张旭(1992-),男,硕士生。
