一种捷联激光导引头视线角速度初值的在线解算算法
2016-10-09高薇薇
高薇薇
(中国空间技术研究院,北京,100094)
一种捷联激光导引头视线角速度初值的在线解算算法
高薇薇
(中国空间技术研究院,北京,100094)
捷联式激光导引头与弹体固联,导引头只能提供视线误差角信息。本人采用了UKF算法得到视线角速度。不过当攻击移动目标时,UKF算法的制导精度和收敛时间均下降。为了提高算法的制导精度和收敛时间,本文提出了一种基于bp神经网络算法的初值在线解算算法。仿真结果表明算法可以大大提高视线角速度算法的收敛速度和制导精度。
捷联激光导引头;视线误差角;UKF;视线角速度初值;bp神经网络
0 引言
捷联激光导引头去除了传统导引头的万向支架和复杂的伺服机构以及陀螺等感应器,使导引头刚性地与弹体连接,降低导引头的设计复杂度,减轻了重量,降低了成本。捷联导引头由于上述特点得到了越来越多的重视。
不过捷联激光导引头只能输出视线误差角,不能输出视线角速度,而且视线误差角存在严重的非线性和复杂的测量噪声,这就要求对系统设计合适的滤波器。近年来,基于UT变换的UKF算法得到快速发展,其以不需要求导、估计精度高等优点,用于全捷联激光导引头视线角速度的提取,可以解决视线角速度提取过程中非线性以及噪声的干扰问题,大大提高制导炸弹的精度。
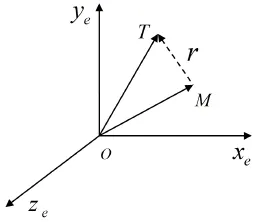
图1 导弹与目标的空间几何关系
1 视线角速度提取算法
1.1导引头视线误差角模型
捷联激光导引头测得的视线误差角信息,将导引头包含噪声的测量量、作为观测量,建立观测方程;将需要解算得到的视线高低角及视线高低角速率,视线方位角及视线方位角速率作为状态变量,建立状态方程。导弹与目标的空间几何关系见图1。图中,T为弹目视线,M为弹体。
1.2UKF滤波算法
1.2.1建立状态方程和观测方程
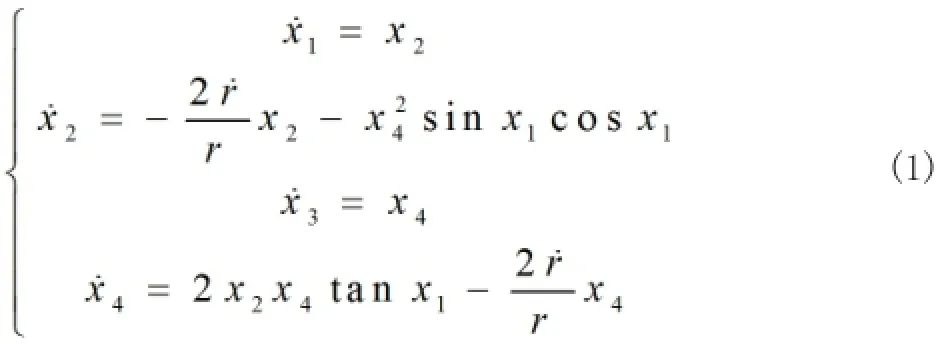
状态方程如下:

1.2.2UKF算法流程
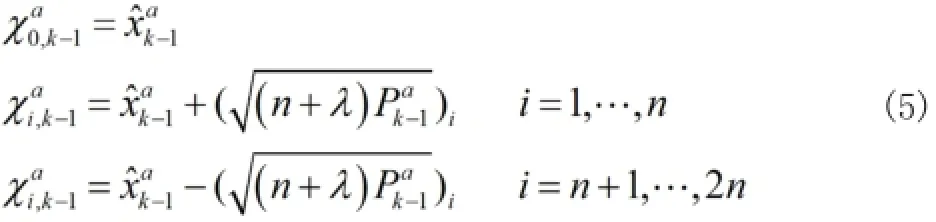
建立以下UKF计算流程:




(8)计算更新后的状态量和方差阵

2 UKF算法初值选取的优化方法
当攻击目标为移动目标时,UKF算法得到视线角速度的精度有所下降。通过分析,发现攻击移动目标,UKF算法的状态变量的初值解算精度下降造成的。
对于固定目标以及运动目标来说,弹目之间视线角和角速度的真实值与根据装订目标的位置信息计算出的视线角和视线角速度之间存在某种映射关系。可以根据这些关系以及导引头提供的视线误差角度信息,求解出视线角速度的初值。该映射关系是一个非线性的函数。需要找到一种算法影射出这种非线性关系。该算法需要在弹载计算机上实时解算,因此要求算法的计算量不能大。该关系可以由下面的函数表示:

为了实现公式(12)中的函数,并保证实现角速度提取精度和收敛速度,必须选择合适的算法。bp神经网络算法具有强大的非线形映射能力,可以表示多输入和多输出的非线性映射,并且计算过程简单,计算复杂度低,计算量小,因此采用了bp神经网络算法来实现上述目的。论研究表明,三层的BP网络能以任意精度逼近任意的非线性函数。
3 仿真分析
本实例中,采用的三层bp网络包含6个输入节点、2个输出节点和5个隐层节点。利用仿真程序,计算出1000组数据作为训练样本,进行学习。采用CPU为2.4G的PC机,利用神经网络训练程序进行仿真,循环10000次之后,总误差E为0.0035876。再将训练得到的神经网络权重系数带入到实现角速度初值的在线解算程序,进行初值解算。解算值与真实值的误差为0.05度/s,算法解算时间为0.005ms。利用这种UKF滤波赋初值方法,提取的视线角和视线角速率与真实值非常接近。能够提高UKF滤波算法的收敛效率和精度,大大提高炸弹精度。
4 结论
本文提出的一种全捷联激光导引头视线角速度提取算法初值的在线解算算法,解决了滤波初值选取的问题,并且实现了弹上实时解算的需求,使得角速率更接近真实值,更利于工程实现,可以大大提高制导炸弹的精度。
[1] 姚郁,章国江.捷联成像制导系统的如干问题探索[J].红外与激光,2006,35(1):1-6.
[2] 苏身榜.捷联寻的制导技术及其在国外的发展.航空兵器.1994(2):45~50.
[3] 刘涛,解永春.UKF稳定性研究及其在相对导航中的应用[J].宇航学报,2010,31(3):739-747
An online algorithm for the initial value of line of sight velocity of Strapdown laser seeker
Gao Weiwei
(China Academy of space technology,Beijing,100094)
The strapdown laser seeker and missile body are combined,and the seeker can only provide the information of line of sight error.I used the UKF algorithm to get the line of sight speed.However,when the target is attacked,the guidance precision and convergence time of the UKF algorithm are decreased.In order to improve the guidance precision and convergence time of the algorithm,this paper presents a new algorithm based on BP neural network algorithm. The simulation results show that the algorithm can greatly improve the convergence speed and precision of the line of sight.
strapdown seeker;Los angles;UKF;initial value of Los angles;BP neural network
