基于STM32的灾难现场搜救机器人研制
2016-09-26陈少华沈巍徐金钰吕闪
陈少华,沈巍,徐金钰,吕闪
(大连交通大学 电气信息学院,辽宁 大连 116028)*
基于STM32的灾难现场搜救机器人研制
陈少华,沈巍,徐金钰,吕闪
(大连交通大学 电气信息学院,辽宁 大连 116028)*
针对矿难、地震等突发灾难发生时的恶劣现场环境,提出并设计了一款能够适应各种复杂地形,信息传输能力强,功能全面的搜救机器人.基本思路将机器人设计为动力部分、功能部分、控制及通信部分.该系统采用蚁群算法计算出最佳搜救路径,使救援更加高效,采用2.4G ZigBee无线传感器技术进行数据传输和信息记录,大大提高了信息的准确性和安全性,结合多种搜救传感器的方式完成 “现场环境探测 ”、 “幸存生命体搜索 ”、 “人员救助救援 ”等功能,该系统可以针对不同应用场合,对功能进行个性化编辑,从而实现一种移动系统多种应用场合的用途.
最佳路径;ZigBee;智能搜救;个性化编辑
0 引言
近年来,我国的矿业、石油天然气业等化工基础产业有了飞速的发展和进步,随之而来的易燃易爆以及具有放射性的有、有害物品在生产和运输过程中产生的灾难事故急速增长.由于我国在危险、易燃、易爆品储藏和运输的法律法规不健全,事故灾难等救助制度不完善且设备管理等各方面均落后于发达国家,一旦灾难发生,救护人员一般无法进入危险区域,而且救灾周期长,效率低下,伤亡惨重.
本文设计的灾难现场搜救机器人可以很好地解决上述问题.本文设计的灾难现场搜救机器人采用优化后的蚁群算法作为控制策略,提高了搜索的效率,减少了人员的伤亡,且本系统采用ZigBee无线传感器技术,将机器人搜集到的信息经过MCU挑选和筛检之后准确、及时无误的传输到指挥平台,并且本系统嵌入了FATFS文本操作系统能够高效有序的将有用信息存储;本系统独特的四轮驱动装置,为机器人提供了强大的动力,能够适应灾难现场复杂的地形;机器人携带了具有高度灵活性的四自由度的机械手,可以搬运质量较小的物品和对灾难现场经行取土采样等功能.近年来,大型灾难事故高发,为了满足搜救工作的需要,国内外许多研究机构和政府部门做了大量的研究工作,研制了可以在环境恶劣的废墟中搜寻的各类型搜救机器人如仿生蛇形机器人等[1].
1 搜救机器人硬件设计
1.1系统硬件整体设计
本系统具有超强越障能力、功能强大、体积小、功耗低等特点,可快速定位被困人员所处区域,及时反馈被困人员的生存状态以及现场环境状况.本系统由MCU控制核心模块、动力驱动模块、环境监测模块等八个系统模块有机的组成.图1为系统整体硬件设计的结构总图.

图1 机器人整体硬件设计的结构总图
1.2系统控制核心模块设计
该机器人选用STM32作为控制核心部件,该MCU是意法半导体公司生产的32位高性能、低功耗、低成本的增强型系列单片机,能够满足用户对高性能、低功耗和经济实用的要求.
1.3搜救机器人外围硬件电路设计
(1)环境探测传感器该传感器包括气体检测和环境温湿度传感器,可以检测甲烷、丁烷、丙烷、烟雾等可燃性气体,且不仅能输出TTL电平信号,而且能输出AD模拟信号.
(2)生物探测传感器生物探测传感器包括生命体红外测部分和无线WIFI视频传输部分,红外探测部分采用红外热释电处理芯片BISS0001.无线WIFI视频传输部分采用红外摄像头和WIFI无线路由器为一体的装置,其能够将灾难现场环境状况或者人员被困位置及时反馈到搜救中心.
2 系统软件设计与流程设计
2.1搜救路径蚁群算法的优化
传统的蚁群算法具有较其他算法更具有鲁棒性,但是计算效率低下,程序算法较繁琐且易出现局部最优解,所以本系统采用优化的蚁群算法作为机器人的搜救路径控制算法.

(1)
经过概率和比例函数的组合优化后,使各条路径上的信息量趋于平衡,从而避免陷入局部最优的状况[2-8].
2.2搜救机器人程序流程图
图2,图3为搜救机器人在自主搜索模式下和人工管理情况下的程序流程图.
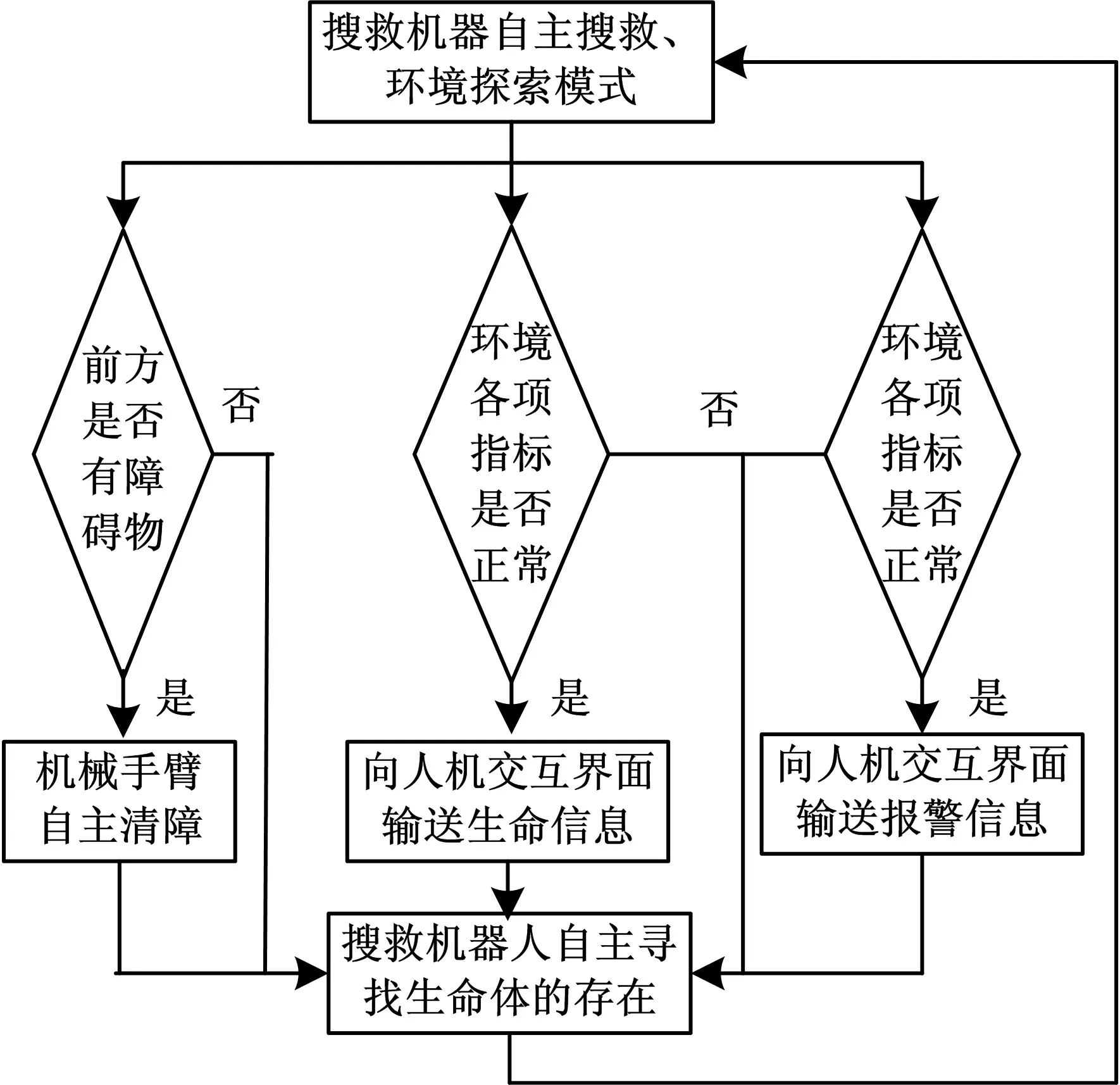
图2 搜救机器人在自主搜索模式下的程序流程图

图3 人工管理模式下的程序流程图
3 系统测试与误差分析
在搜救机器人制作期间,多次对搜救机器人的样机进行了现场实验,以验证提高技术的实用性及环境适应能力.在测试现场,模拟了灾难现场的真实工作环境,分别对搜救机器人人机交互性能、人机协作控制性能、操作人员使用性能、机器人自主能力、越障能力、环境感知系统、通信系统等关键技术进行了测试验证.
(1)避障测距实验本系统的设计的超声波避障传感器的测量范围是0.07~ 1.00 m,测量精度设置为1cm,测量距离时保证传感器与被测物体无直接接触,通过OLED液晶显示屏将测量数据清晰、稳定的显示.利用本系统设计的超声波传感器模块进行实际测量的结果如图4所示,可以得出在测量范围内,测量的误差基本满足要求.

图4 系统测量实验结果
误差主要来自:发射与接收间的时间对测量精度的影响、测量环境对测量精度的影响和超声波波束与探测目标的入射角对测量精确度的影响.
(2)通信性能的实验整个系统测试由发射电路和接收电路构成,其中接受电路与PC机相连,用串口助手窗口观察接收到的数据是否与发送数据一致.由于灾难现场的无线通信环境的未知性和不确定性导致同种无线通信模块的传输性能也不尽相同,所以我们选择了不同的实验场地来进行数据传输实验.实验结果显示现场带电烟尘颗粒、高建筑物以及外界无线电干扰等因素会对本系统的无线通信模块产生一定的影响,信号传输距离衰减15%左右.
(3)机械手臂的实验由于机械手臂采用模拟舵机控制,具有一定的回程差和温飘,角度误差一般在2左右, 但是由于控制精度误差在系统允许的范
围内,所以可满足要求.
4 结论
本文设计的多功能灾难现场搜救机器人是“人工介入-自主搜索”相结合的智能搜救系统,不同环境下可以任意切换,大大提高了机器人的实用性,并且采用优化型蚁群算法规划搜救路径为搜救幸存者,勘探灾难现场情况节约了时间.强大的驱动和转向机构,保证了机器人能够使用各种复杂环境.本文研究的智能搜救机器人系统在消防探测、排爆、地震、泥石流、台风、矿难等灾难后的搜救探测有着广泛的应用价值.
[1]王忠民.灾难搜救机器人研究现状与发展趋势[J]. 现代电子技术,2007(17) :152-155.
[2]杨志晓,郭胜国.基于改进蚁群算法的机器人路径规划算法[J]. 微计算机信息,2008(24):211-214.
[3]DING YUFENG, PAN QIAN.Path Planning for Mobile Robot Search and Rescue Based on Improved Ant Colony Optimization[J].Algorithm Applied Mechanics and Materials, 2011,EI:66-68.
[4]马占春,韩旸.移动机器人的路径规划算法与仿真[J].计算机仿真,2013,30( 5) : 374 - 377.
[5]朱大奇,颜明重.移动机器人路径规划技术综述控制与决策[J].控制与决策,2010,25(7):961-970.
[6]黄席樾, 向长城, 殷利胜. 现代智能算法理论及应用[M]. 北京:科学出版社,2009.
[7]RAJESH K B, MAYANK DAVE, JOSHI R C. Ant colony based rule generation for reusable software component retrieval[J] . ACM SIGSOFT Software Engineering Notes,2010,35(2) :1-5.
[8]乔慧芬,潘广贞.移动机器人的实时路径规划研究与仿真[J]. 计算机仿真,2015(1):164-165.
Design and Research of Disaster Scene Search and Rescue Robot based on STM32
CHEN Shaohua, SHEN Wei, XU Jinyu, LV Shan
(School of Electronics and Information Engineering, Dalian Jiaotong University, Dalian 116028, China)
Aiming at the sudden disasters such as earthquake harsh field environment, a search-and-rescue robot is designed with strong ability to adapt to the complex terrain and surmount obstacles and comprehensive functions to search and rescue in order to improve the efficiency. The basic idea of designing the robot consists power part, function part, control and communication part. The system uses ant colony algorithm to calculate the best search path, so that the rescue can be more efficient. The ZigBee 2.4G wireless sensor technology for data transmission and information record is used, and the accuracy and security of information is greatly improved. Combined with a variety of search and rescue sensors to complete the "environment detection," "Life Search," "rescue" and other functions, the system can be used for different applications to achieve a variety of mobile applications.
best path; ZigBee; intelligent search and rescue; personalized editing
1673- 9590(2016)05- 0113- 03
2016- 04- 10
辽宁省博士科研启动基金资助项目(20141108)
陈少华(1979-),男,副教授,博士,主要从事嵌入式控制和宽带无线通信技术的研究
A
E- mail:dl_chenshaohua@163.com.
