基于CATIA的机械手虚拟装配及运动仿真研究
2016-09-26花勇,赵刚
花 勇,赵 刚
(江苏食品药品职业技术学院,淮安 223003)
基于CATIA的机械手虚拟装配及运动仿真研究
花勇,赵刚※
(江苏食品药品职业技术学院,淮安223003)
在分析机械手的结构特点及其运动属性的基础上,利用CATIA软件对机械手零件进行参数化建模并在此基础上对机械手进行虚拟装配、干涉检查和运动仿真分析,使其满足自动生产线的功能要求,可大大提高自动生产线机械手的设计效率,缩短开发时间,降低开发费用。
CATIA,机械手,虚拟装配,运动仿真
0 前言
随着我国国民经济飞速发展和工业生产自动化程度水平的提高,自动化生产线在机械加工、轻工机械等机械制造领域中有着日益广泛的应用。作为自动生产线中的核心部件的机械手,它起着输送和装卸工件到指定位置的作用。因此,对机械手进行设计及运动分析,对于整个自动线的设计水平的提高有着至关重要的意义。本文借助CATIA的虚拟样机技术,建立机械手的虚拟样机并对其内部的静、动态干涉检查、运动包络进行分析,并将其取代物理样机来验证产品的结构、功能、工艺等方面的性能,大大缩短了自动生产线开发时间,降低开发费用。
1 机械手装置构成及运动控制要求
本文研究的机械手为直角坐标系机械手。机械手装置主要由机械手臂、执行机构、驱动机构和控制系统四大部分组成,其支撑结构主要为铝型材机架。机械手在自动化生产线中的控制要求为:根据生产实际需要,按照一定的操作顺序完成搬运物体、操作工具等各种作业。机械手装置被整体安装在伺服传动组件的滑动溜板上,并在传动组件带动下整体作直线往复运动,实现机械手去供料单元抓取工件后,通过同步带运送机械手到分拣单元去分拣的操作[1]。
2 机械手模型的数字模型的建立
利用CATIA功能强大的机械设计模块、形状模块和知识工程模块建立机械手的三维零件模型,为机械手的虚拟装配及运动仿真做好准备。直角坐标机械手主要有机械手爪、伸缩气缸、回转气缸、支撑基座、同步带轮、螺钉、螺母等零件组装而成。其建模方法可通过以下三种方法来实现。
1)以机械手爪为代表的结构相对复杂,非标准尺寸的零件采用CATIA的机械设计模块建立的机械手爪三维零件图如图1所示。
2)螺钉、螺母等紧固标准件,可通过参数化建模方法生成符合国标的内六角螺钉和螺母的CATIA标准零件库。由于机械手装配时需要多种尺寸的内六角螺钉、螺母,为了便于装配,可利用CATIA的零件设计模块按照螺钉的国标尺寸建立一个内六角标准零件模板,再利用CATIA的Formula、Design Table和Catalog命令,通过参数化建模方法生成符合国标的内六角螺钉、螺母的CATIA标准零件库[2]。
以内六角螺钉为例,按照内六角螺钉GB/T 70.1—2008标准,使用f(x)工具建立d、p、dk、k、r、e、s等13个尺寸变量,建立内六角螺钉的参数化模型。将螺钉的参数按顺序写入Excel表格内,然后再导入CATIA的Design Table的设计表中。为了便于生成的螺钉可以像标准库文件一样调用,在CATIA里按照GB/T 70.1—2008新建一个螺钉Catalog库文件[3]。
3) 同步带和同步带轮的设计按照 GB/T 11616—1989标准的XL型同步带参数,利用CATIA的知识工程模块进行设计。
同步带齿廓设计的方法和同步带轮相同。首先利用草图命令画出一个齿廓二维草图后拉伸成三维图形。由于齿廓分布是按照延长孔分布的,利用矩形或者圆形阵列命令不能将齿均匀的布满整个皮带。这里我们利用CATIA的知识工程模块,以同步带一个齿廓作为超级副本,然后计算出大轮覆同步带夹角、同步带齿数和齿廓在同步带上的分布点。最后在同步带的分布点上插入齿廓的超级副本如图2所示。

图1 机械手爪

图2 XL型同步带
3 机械手虚拟装配
在进行机械手装配时应遵循先生成组件再进行总装的原则。在装配环境中对机械手的底板施加固定约束,然后采用自底向上的设计方法依次将机械手臂和机械手爪、底板、同步带轮等组件施加约束,最后进行总体零件装配的更新,得到机械手的装配图如图3所示。为了更加真实地掌握机械手的形状特性和设计精度,这里利用CATIA的DMU Fitting Simulator(DMU装配)模块对机械手进行虚拟装配。用户通过对机械手的装配和拆卸过程定义或仿真,将机械手的装配步骤分别记录下来并保存成轨迹的形式,以交互方式控制产品的真实的三维模拟装配过程[4],机械手虚拟装配过程如图4所示。
图3 机械手装配图

图4 机械手模型虚拟装配图
4 机械手的运动仿真
数字样机(DMU)是CATIA中运动分析模块、它可替代物理样机实现较为简单的运动机构的仿真分析。通过建立机械手的数字样机模型,验证仿真并记录机械手各运动副之间的运动、进行干涉检查以及运动部件的包络生成。为设计者提供分析与运动相关的性能和参数。
4.1机械手DMU运动仿真流程
在完成机械手模型的静态装配后,即可建立机械手的数字样机模型。数字样机的运动仿真流程如图5所示。

图5 数字样机的运动仿真流程图
按照流程图将机械手的数字样机赋予运动属性(建立运动机构),建立机械手的运动仿真模型。
4.2运动机构的建立
4.2.1运动副的创建
本文根据实际需要,在完成机械手的数字样机静态装配后根据实际情况综合运用各种运动副创建方法,对机械手零件添加各种运动副。例如机械手手爪和定位销之间、旋转气缸轴和气缸座之间沿轴线的转动可用旋转运动副连接,另外通过直接创建法也可以很方便地创建该旋转运动副,例如四导柱旋转气缸中的导柱和气缸之间沿某一条公共直线滑动的运动副,可采用棱形副来创建。而机械手中有一些部件之间没有相对自由度,为了简化创建运动副的复杂程度,可以用刚性接合使其具备一个零件的整体属性,简化仿真过程。最后选择底板作为固定零件,同时观察运动结构创建过程中“自由度(DOF)”的变化情况,当自由度变为0时即可进行运动仿真。
4.2.2仿真机构的驱动与重放
机械手的运动仿真是典型的多驱动控制,该机构具有5个自由度驱动,分别完成机械手升降、左右移动、机械手伸缩、旋转,手爪的夹紧松开等动作。
1)程序编制。切换至“知识工程”→“知识顾问”工具栏上的工具工作台。在“活跃参数”工具栏中单击“规则”图标,显示“规则编辑器”对话框。在“规则编辑器”对话框按照机械手的动作指令顺序完成全部动作,部分程序的如下:
if(`机械装置.1KINTime`>0s and`机械装置. 1KINTime`<=5 s)`机械装置.1命令命令.4(z轴升降)长度`=-50mm/5 s*`机械装置.1KINTime`
if(`机械装置.1KINTime`>5 s and`机械装置. 1KINTime`<=15 s)`机械装置.1命令命令.3(z轴旋转) 角度 `=-90 deg/10 s*(`机械装置.1KINTime`-5 s)
if(`机械装置.1KINTime`>15 s and`机械装置. 1KINTime`<=20 s)`机械装置.1命令命令.2(手臂气缸x轴)长度`=-80mm/5s*(`机械装置.1KINTime`-15 s)
2)运动轨迹及扫略包络体分析。按照上面程序制定的运动函数,选择机械手指指尖作为运动部件、底座作为固定物参考,利用CATIA软件的 DMU Kine-matics模块,绘制出机械手爪的合成运动轨迹及合成运动包络体(如图6所示)。通过观察机械手在整个运动过程中所扫掠过的空间范围,可以得出机械手的运动区域以及机械手在仿真运动中的干涉问题,对出现干涉现象的零部件进行修改,提高机械手的设计质量。
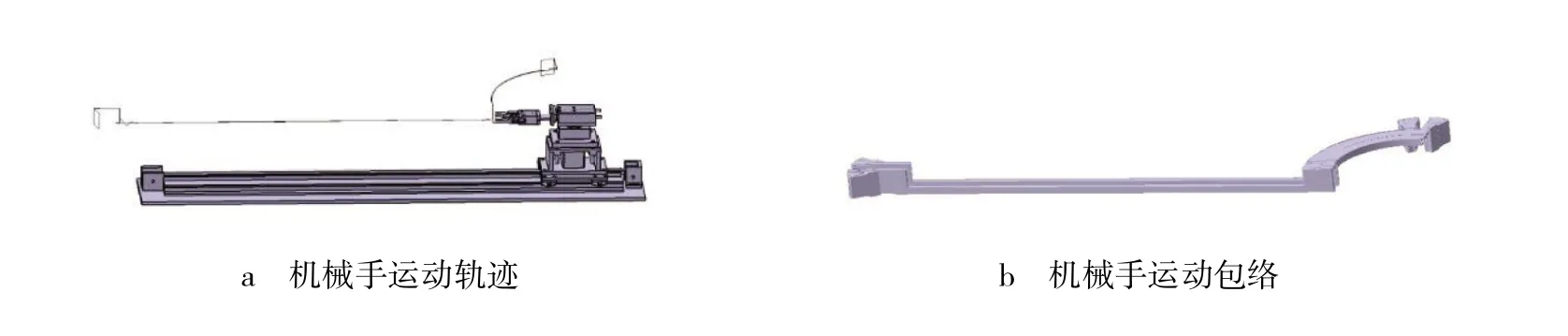
图6 机械手运动轨迹及包络
5 结论
通过CATIA软件建立机械手的数字化模型,对机械手中的标准件零件建立参数化的模型库,大大提高了机械手的建模的效率,便于后续建立机械手系列的模型库、以及功能的升级和扩展;在此基础上对机械手进行虚拟装配,合理描述各个零部件的装配顺序和路径,确保所有零件的可装配性及可维护性;最后利用CATIA的数字样机(DMU)技术建立了机械手的虚拟样机,绘制出机械手的运动轨迹和包络,并在其过程中检查是否发生干涉和碰撞等现象,为进一步优化机械手的结构和后续机械手功
能的开发和升级提供了依据。
[1]吕景泉.自动化生产线安装与调试[M].北京:中国铁道出版社,2009.
[2]刘宏新,宋微微,史玉红.CATIA数字样机运动仿真详解[M].北京:机械工业出版社,2011.
[3]胡于进,卢力航,孙升.基于网络数据库三维参数化标准件库的研究和开发[J].机械与电子,2006(2).
[4]姚竞争,韩端锋,李健.基于CATIA系统的虚拟装配仿真研究[J].船舶工程,2011(1).
The Study on Virtual Assembly and Motion Simulation of Manipulator Based on CATIA
Hua Yong,Zhao Gang※
(Jiangsu Food&Pharmaceutical Science College,Huaian 223003,China)
Through the analysis of structure characteristics and motion property of the manipulator,this paper use CATIA software to parametric modeling for manipulator and on this basis to virtual assembly,interference checking and dynamic simulation analysis,which enable it to meet the functional requirements of the automatic production line,greatly improved manipulator of the automatic production line design efficiency,shorten the development time and reduce development costs.
CATIA,manipulator,virtual assembly,motion simulation
花勇(1979—),男,硕士研究生,江苏省淮安市人,讲师,主要从事数字化设计研究。Email:447630310@qq.com.
赵刚(1983—),男,硕士研究生,研究方向为运动机械设计。Email:499277294@qq.com
