一种新型的液压驱动矢量推进装置的运动学分析
2016-09-26文跃兵
文跃兵
(湖南工业职业学院,湖南 长沙410208)
一种新型的液压驱动矢量推进装置的运动学分析
文跃兵
(湖南工业职业学院,湖南 长沙410208)
设计了一种基于杆件传动的液压驱动矢量推进装置,该装置利用三个液压缸系统作为装置的驱动系统,通过控制三个活塞杆位移控制壳体的偏转方向,达到控制壳体的全方位转动的要求。建立了液压缸的位移与活塞杆位置的数学模型,结果表明了壳体的偏转角度与液压缸位移量具有一一对应的关系。建立了装置的运动学模型,仿真分析结果表明了该矢量推进装置设计合理,能满足壳体全方位转动的要求,降低了运载器推进系统的复杂性,提高了运载器的机动性和灵活性。
矢量推进装置;液压;运动学;全方位转动
海洋资源探测是开发海洋的首要任务,装备各种探测仪器的水下载运器是实现深海以及两极探测必不可少的重要工具,因此研制新型高效的水下载运器非常必要[1-3]。由于海底环境情况复杂,对水下载运器的机动性和灵活性要求较高,所以载运器的推进系统研究是一个关键的技术问题,目前绝大部分载运器采用螺旋桨推进技术。螺旋桨的机构作用一般有两个方面:第一方面是要输出轴能全方位的实现姿态调整,该功能由定向机构来实现;第二个方面是将驱动器的运动转换为螺旋桨的空间运动,由动力传动系统来实现。
国内很多研究传统螺旋桨技术的大部分都是用的齿轮。齿轮传动有着效率高,机构紧凑,传动稳定等优点,但是齿轮传动的效率比较低,功率损耗比较大[4-8]。本文采用传统的螺旋桨推进技术设计了一种液压驱动的新型推进矢量装置,该装置是采用三个液压缸系统作为装置的驱动装置,通过控制三个活塞杆位移控制壳体的偏转方向,达到控制壳体的全方位转动的要求。为了验证设计的正确性,本文建立了矢量装置的运动学模型并进行了仿真分析,为新型载运器的设计与研究提供了基础。
1 系统组成与分析
1.1系统总体结构
矢量推进器结构的如图1所示,其运动是由三个液压缸和液压马达提供驱动从而使运载器能完成前进、后退、偏航、俯仰等动作。液压缸活塞杆通过球形铰链与壳体1形成球面运动副。三个液压缸6、7、8通过控制三个活塞杆3、4、5的伸出和收缩,从而带动壳体所处平面进行偏转。螺旋桨-2通过轴-9与壳体-1相连,当外壳-1发生偏转时,带动螺旋桨-2通过万向节10而产生偏转,从而实现了方向的偏转。液压马达的旋转由万向节10传给轴9,再通过轴9传递给螺旋桨2,使螺旋桨运转,从而使整个机构得到推力。所以,与一般的推进系统产生的推力相比,矢量推进器产生的推力的方向不只是沿着航行器的纵轴方向,而可以根据控制需求产生合适方向的推力。
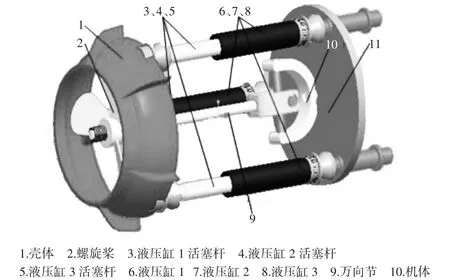
图1 矢量推进器三维结构图
本文提出了通过活塞杆的位移控制矢量推进器的偏转,零部件之间的巧妙连接极大地降低了水下运载器的结构复杂性,通过壳体与轴相连,壳体偏转带动轴和螺旋桨偏转,从而改变运动推进的方向。万向节的使用使得马达可以驱动与其有偏角的轴转动从而带动螺旋桨高速旋转。
1.2自由度的计算
由图1可知在整个机构中有5个活动构件,3个移动副,3个线高副(自由度为2),一个转动副。此机构运动的自由度F:

式中:n为机构中的运动构件数;k为机构中的运动副数;ci为第i个运动副所加的约束数。
在整个设计中有三个液压缸和一个液压马达的驱动,限制了四个自由度,与计算相符,证明了该机构具有确定性运动。
2 运动学模型的建立
2.1矢量推进装置运动坐标建立
矢量推进装置运动如图2所示,其中AD、BE、CF为活塞杆,依次对应着液压缸1,液压缸2,液压缸3.EH、DG、FI分别与机座固连,末端H,G,I组成一个平面,活塞杆杆头A、B、C组成一个平面ABC,假定中心O在平面HGI的中心。平面ABC绕旋转中心O旋转,设A、B、C到其中心O的距离为r,O到平面ABC距离为h.以点O为原点建立定坐标系O-xyz和动坐标系O-x'y'z',初始时两坐标系重合。

图2 矢量推进装置的机构运动简图
当动坐标系O-x'y'z'在定坐标系O-xyz下绕x轴旋转α角(正负由右手定则决定)的变换矩阵为R(x,α);然后动坐标系O-x'y'z'在固定坐标系O-xyz下绕y轴旋转β角(正负由右手定则决定)的变换矩阵为R(y,β);当动坐标系按上述步骤进行变换时的总变换矩阵为[9]:
动坐标系O-x'y'z'下任意一点X1(x',y',z')转换成固定坐标系O-xyz下的坐标X(x,y,z)时可用下面变换矩阵实现。

设在初始位置时,平面ABC和平面GHI平行,其三点所做的圆半径为r,此时AG=BH=CI=h,铰接点A、B、C在定坐标系O-xyz下坐标为A(r,h,0)、.铰接点G、H、I在定坐标系O-xyz下坐标为G(0,r,0)、,,液压缸1,液压缸2,液压缸3活塞杆的伸缩量分别为△1,△2,△3,则△1=A'G -AG,△2=B'H-BH,△3=C'I-CI.
设当平面ABC绕x轴回转α角后,绕y轴回转β角后,各铰接点在固定坐标O-xyz中坐标分别为A' (x1,y1,z1)、B'(x2,y2,z2)、C'(x3,y3,z3).交接点G、H、I三点在定坐标系O-xyz下坐标不变。A'、B'、C'的坐标值可由公式(3)计算得到。
2.2壳体偏转角与液压缸伸缩量关系
根据△1=A'G-AG,△2=B'H-BH,△3=C'I -CI.则可以根据式(4)计算由运动计算可以得到液压缸1,液压缸2,液压缸3活塞杆的伸缩量分别为△1,△2,△3;并且由式(4)可知所需转动的角度α,β确定,则△1,△2,△3的大小唯一确定。
设AG、BH、CI代表着液压缸1、液压缸2、液压缸3.采用MATLAB软件计算当平面ABC绕X轴转动α,Y轴转动β时,液压缸1、2、3的伸缩量△1,△2,△3.初始位置时平面ABC和平面GHI平行,r=220,AG=BH=CI=h=613.5,设转动角度表示为(α,β),三液压缸伸缩量由△1,△2,△3表示。
根据公式(4)可以得平面ABC转角(α,β)与三液压缸伸缩量△1,△2,△3关系图如图3、图4、图5所示。
图3,图4,图5分别显示了当ABC平面绕X轴旋转角度在-0.6 rad~0.6 rad范围变化,绕Y轴旋转角度在-0.6 rad~0.6 rad范围变化时,液压缸1、液压缸2、液压缸3的伸缩量大小。

图3 ABC平面绕轴转动角度(rad)与液压缸1伸缩量关系
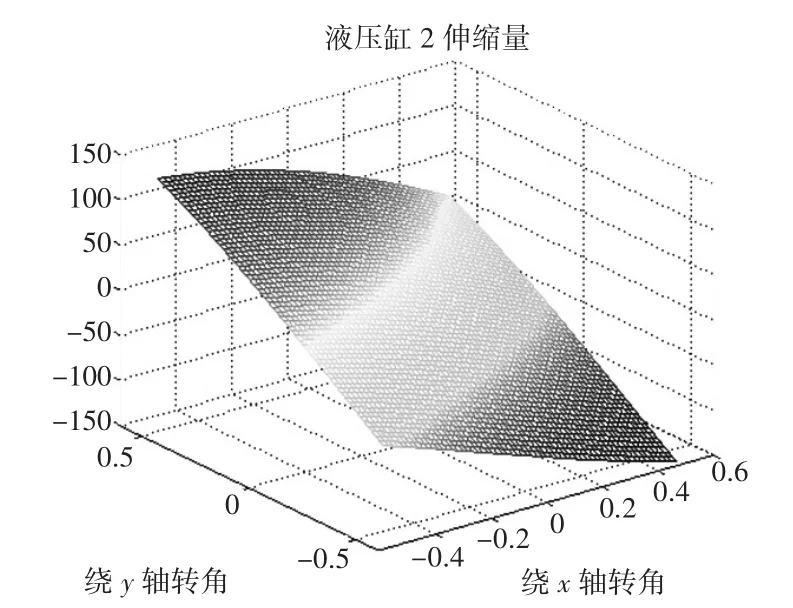
图4 ABC平面绕轴转动角度(rad)与液压缸2伸缩量关系
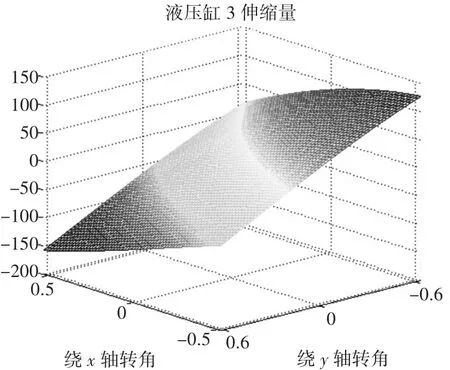
图5 ABC平面绕轴转动角度(rad)与液压缸3伸缩量关系
由图可知,当旋转角度为(0,0)时,三个液压缸伸缩量为(0,0,0)。对于任意一个旋转角度(α,β),均对应着唯一的伸缩量(△1,△2,△3)。
3 ADAMS运动学与动力学分析
利用三维造型软件Proe,建立液压驱动矢量推进装置的实模型,但该装置的模型复杂,不利于动力学的建模与分析,所以对该装置进行简化[10]。采用以下几条简化原则:(1)圆角、倒角仅仅影响内应力,对整体受力的影响较小,故予以忽略;(2)固定约束代替连接件;(3)轴承内部受力非常复杂,但是对跟它接触零件受力又很简单,所以把它简化为空心圆柱体;(4)零部件的装配误差,属理想装配,制造误差为零等;
把在Proe中建立的三维模型导入到ADAMS中,然后在合适的位置添加相应的运动副,如铰链处添加转动副、在缸体处添加移动副等,在三个缸体的移动副上添加三个驱动运动。在轴与机架间的转动副上添加一个转动。
设定动平台(壳体)同时绕X轴和Y轴以相同速率翻转,同时在动平台(螺旋桨)上施加沿z'方向恒定外载荷1 200 N,三个活塞杆位移随<z',z>角度变化曲线如图6所示。<z',z>角度由小增大的同时,保证三个三个液压缸的伸缩量是顺序增大,由图可以得出两个结论:(1)通过液压缸不同的伸缩量来实现矢量推进器的偏转,偏转角度一定,则活塞杆的位移值也唯一,故偏转角度和液压缸活塞杆位移量一一对应。(2)随着<z',z>角度由小增大到35°,液压缸1的液压杆逐渐收缩到将近100 mm,液压缸2的液压杆逐渐伸长将近100 mm,液压缸3的液压杆逐渐收缩50 mm,证明了随着<z',z>角度变化,液压缸的伸缩量的连续性。
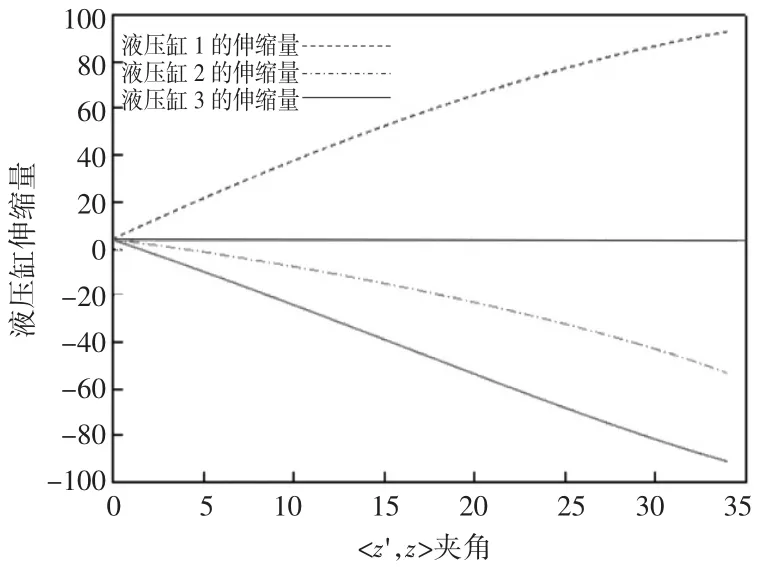
图6 <z',z>夹角与液压杆位移量关系
4 结束语
矢量推进装置是一个用于机械设备全方位的摆动及推进的关键部件,实现机械设备前进、后退、前倾、俯仰等动作。本文设计了一种新型的液压驱动矢量推进装置,提出了采用杆件传动方案,通过液压杆的伸缩带动整个壳体的偏转,通过控制三个活塞杆位移精确控制壳体偏转角度。建立了其运动学模型,并通过ADAMS运动和动力学分析,论证了该矢量推进装置设计合理,能满足壳体全方位转动的要求,降低了运载器推进系统的复杂性,提高了运载器的机动性和灵活性。
[1]彭学伦.水下机器人的研究现状与发展趋势[J].机器人技术与应用,2004,5(4):43-47.
[2]冯正平.国外自治水下机器人发展现状综述[J].鱼雷技术,2005,13(1):5-9.
[3]徐海军,谢海斌,张代兵.微小型水下机器人推进方式比较研究[J].兵工自动化,2009,28(4):85-87.
[4]王聘.无人自主水下航行器矢量推进器研究[D].西安:西北
工业大学,2006.
[5]杨俊.水下矢量推进器的运动学仿真及优化设计[D].长沙:长沙理工大学,2010.
[6]方世鹏,潘存云,徐海军,等.水下载运器矢量推进螺旋桨传动系统设计与分析[J].机械制造,2009,43(533):22-26.
[7]Emanuele Cavallo Rinaldo C.Michelini,Conceptual Design of an AUV Equipped with a Three Degrees of Freedom Vectored Thruster[J].Journal of Intelligent and Robotic Systems 2004,39(5):365-391.
[8]Yannick Morel.Design of an Adaptive Nonlinear Controller for an AutonomousUnderwater Vehicle Equipped with a Vectored Thruster[J].Ocean Engineering 32,2005,5(6):2165-2181.
[9]张启先.空间机构的分析与综合(上)[M].北京:机械工业出版社,1984.
[10]刘善增,余跃庆,杨建新,等.3自由度并联机器人的运动学与动力学分析[D].北京:北京工业大学机械工程与应用电子技术学院,2009.08.
Kinematic Analysis of A New Hydraulic Driving Vector Propulsion Device
WEN Yue-bing
(Hunan Industry Polytechnic,Changsha Hunan 410208,China)
This paper presents a vector propulsion device of hydraulic drive based on member bar transmission. This device use three hydraulic cylinder systems as the driving power,and control the direction of the shell through the change of the three cylinders’piston displacements.At last,the device reach the requirements of omni directional rotator of the shell.It also sets up the mathematics model about the displacement of hydraulic cylinders and the coordinate positions of piston rods.The results showed the one-to-one correspondence between the deflection angle of the shell and cylinders’piston displacements.This athesis established the kinematic model of the device and had the simulation analysis.The analysis results demonstrate the of rationality of the design method in propulsion device.This scheme mentioned in this paper can satisfy the requirements of the omnidirectional rotator of the shell,besides,it reduced the complications and improved the mobility and flexibility of the propulsion system in the missile carrier.
vector propulsion device;hydraulic;kinematics;omni directional rotator
TG315.4.2
A
1672-545X(2016)07-0020-03
2016-04-07
总装预研基金资助项目(8130208)
文跃兵(1979-),女,湖南益阳人,硕士研究生,讲师,主要研究方向为机械设计与制造方向。
