TLS—一种新的着陆系统
2016-09-23杨益欢
杨益欢,李 冰,陈 阳
(中国人民解放军92187部队,长治046011)
TLS—一种新的着陆系统
杨益欢,李 冰,陈 阳
(中国人民解放军92187部队,长治046011)
应答着陆系统是一种基于应答机的精密进近着陆系统,是FAA认可的I类精密进近的导航系统,满足ICAO要求的精度标准。本文介绍了系统的组成、配置和工作流程,分析了系统的测角、测距原理和方法,阐述了系统的应用特点和主要性能,为导航系统的发展奠定了基础。
应答着陆系统;测角;测距;特性
0 引言
仪表着陆系统(Instrument Landing System ,ILS)是国际民航组织规定的标准着陆系统,是当前军民航使用的主要精密进近导航系统,为进近的飞机提供着陆引导信息。但它存在对安装场地要求严格、设备机动性差等缺点,在地形条件较复杂的机场和对机动要求较高的军方,ILS的使用就受到了限制。
应答着陆系统(Transponder Landing System,TLS)主要是为了弥补ILS的不足而设计生产的。TLS克服了ILS的缺点,只加装地面设备,利用飞机现有的ILS接收机和二次雷达机载设备,不对飞机进行任何改动,可在复杂场地条件和临时机场实现精密进近着陆。美国ANPC公司于1991年设计研发TLS,于2001年12月21日获得了FAA书面认证,正式成为美国政府承认的I类精密进近导航系统。现在全球已有美国、澳大利亚、菲律宾等国家安装了多套TLS系统,但TLS尚未进入中国市场。
1 TLS的组成及配置
应答着陆系统主要由询问天线、方位天线(LAOA)、仰角天线(GAOA)、校准/测试装置(CAL/BIT)、数据处理基站、数传装置、上传监控装置以及以太网络等几部分组成[1-2]。各部分的主要功能如下:
1)询问天线:接到数据处理基站命令后,发射1030MHz询问信号。
2)方位天线:用于测量飞机的距离和方位,共有3条水平相间的天线,提供2个不同精度的方位角测量值。
3)仰角天线:用于测量飞机的距离和仰角,共有4个垂直相间的天线,提供3个不同精度俯仰角测量值。
4)校准/测试装置:向天线模拟飞机发送一个1090MHz的脉冲,使系统可实时进行自检。
5)数据处理基站:基站包括中央处理器和设备架。主要处理从方位和仰角天线中提取的测量值,并计算出引导误差值。
6)数传装置:数传装置包括数传天线和设备架中的引导信号发射机。数传铁塔上有航向、下滑数传天线和监测天线。
7)数传监控装置:通过数传天线接收航向台和下滑台引导信号,并对其进行监视。
8)以太网络:主要负责数据处理基站和方位天线、仰角天线之间控制信号和数据信号的传送。
应答着陆系统一般安装在进近方向跑道的着陆点附近,并可前后平移91m,左右平移106m。TLS放置在这个区域内的任何位置都可以为飞机提供最大15°的偏移进近。其标准配置如图1所示。

图1 TLS的组成及配置Fig.1 Composition and configuration of TLS
需要注意的是,尽管应答着陆系统的安装地点灵活,但各组成部份之间的距离是有一定要求的。
2 TLS工作流程
TLS通过测量飞机二次雷达应答机应答信号的载波相位和到达时间,确定飞机的方位角、俯仰角和距离。然后将这些位置信息模拟成ILS相应的信号格式发送出去,飞机的ILS接收机接收到信号后,将其转换为控制信息和指示信息,使飞机实现自动着陆或人工着陆。该过程主要分为询问搜索和导航引导两个阶段[3-4],如图2所示。

图2 TLS工作流程Fig.2 The working process of TLS
(1)询问搜索阶段
飞机到达进近着陆端口时,TLS在其跟踪区内搜索该飞机应答机识别码[5]。此时TLS开始发射带有起始脉冲标志的1030MHz询问信号,空中任何飞机应答机收到此信号后,均发出1090MHz的应答信号。方位和仰角天线在收到起始脉冲后的最初一段时间内,储存跟踪区内所有飞机发回的1090MHz应答脉冲,以及载波信号的测量值。然后,TLS在发回的应答机脉冲中搜寻指定的识别代码。
(2)导航引导阶段
当指定代码被识别后,系统就开始计算此架飞机的位置信息。如果发现两个或两个以上的飞机发回的应答信息具有相同的识别代码,则停止发送引导信息,以避免产生危险或威胁飞行安全。
方位天线和仰角天线根据应答代码相对于起始脉冲的到达时间(TOA)和根据载波信号的相位测量值计算得到的到达角度(AOA),通过数据处理基站计算出飞机的当前位置和飞行轨迹,与预定的进近轨迹对比后得出当前飞机的位置引导信息,并立即传送给飞机。
整个过程以10Hz的频率循环进行,一直持续到飞机到达复飞点。此时,系统转为诊断模式进行校准测试,如果测试合格,TLS将转为待命模式,等待执行下一次目标飞机的搜索和导航。
3 TLS工作原理
3.1TLS测角原理
TLS采用相位干涉式测角算法[6-7],2个接收天线同时接收飞机的应答信号,不同方位上飞机应答器发射的无线电信号到2个接收机的距离不同,因而相位也不同。只要测出它们的相位差就可确定飞机的方位。
如图3所示,假设相位干涉式测向器的两个接收天线位于A、B两点,它们之间的距离为d,飞机M偏离基线中垂线的方位为θ。相位计测得M处飞机应答信号的相位差为φ,则有:

图3 TLS测角原理Fig.3 The angle measurement principle of TLS

式中,λ为信号波长,当RA≫d,RB≫d时:

由式(3)可知,当d和λ为已知时,只要测得相位差φ,就可确定飞机方位θ。
这种测向器的测向准确度,除了传播条件的影响,主要还取决于基线长度和飞机所在方位。据式(3)可以得到方位误差与测向误差之间的关系为:

由式(4)可以得出如下结果:
1)在θ=0°的方向上,即在基线的中垂线上,定向的准确度最高,偏离这个方向,定向准确度将降低。因此,用这种干涉式相位定向器测向时,只要设定一个最低准确度Δθmin,就会在基线中垂线两侧存在一个有效扇形区,扇形区以外的测向准确度就不符合要求了。显然,这个扇形区的边界为:

TLS的仰角和方位天线安装在着陆点附近,仰角天线基线垂直于地面,方位天线基线垂直于跑道,进入进近着陆范围的飞机基本位于仰角和方位天线基线的中垂线上,测量角度在10°以内,其定向的准确度可以得到保证。
2)在其他条件相同的情况下,基线长度d越大,测向准确度越高。但是,当d增加到大于λ/2时,在0°~±90°的方位范围内,就不能单值定向了。
为了保证在-90°~90°的方位范围内,能高精度的单值定向,有时需要在一条直线上设置两个或更多不同基线长度的定向器,长基线的定向器保证测向的高精度,短基线的测向器用于消除长基线的多值性。
TLS的仰角天线采用4组天线,方位天线采用3组天线,长基线的天线保证测向的高精度,短基线的天线消除了长基线天线的多值性。
3.2TLS测角过程
TLS测角电路 (以仰角信号为例)组成包括:天线、RF滤波器、RF接收装置、本机振荡器、鉴频器、相位幅值测量单元、相位获取单元、存储器和检测器等[1-2],如图4所示。
4个仰角天线接收的飞机应答信号经过RF滤波器滤除杂波之后送入RF接收装置处理,和本机振荡器的频率相乘后进行下变频,下变频后各信号间的相位关系不变,将下变频的四路信号中的一路作为参考信号,计算出该参考信号与其余3个信号的差分载波相位,实现3个天线阵列孔径,得到低、中、高3个不同分辨率的相位测量值。参考天线信号通过专用通道3,其他3个信号通过RF接收装置中的开关被多路传输到2个RF接收器通道1、2,送入相位幅值测量电路进行相位和幅度测量,并为相位获取单元提供记录的视频信号A、B、C和数字化的相位数据a、b,用于信号处理。参考天线信号被送入鉴频器进行鉴频,得到飞机相对TLS的多普勒频率模拟信号,反映多普勒频率模拟信号和反映相位误差的模拟信号送入相位获取电路进行A/D转换,转换后的数字信号送入CPU进行处理,补偿多普勒频率误差,消除多路径干扰,最后得到飞机的角度值,输入到基站中的处理器。

图4 TLS测角原理框图Fig.4 Angle measurement block diagram of TLS
3.3TLS测距原理
TLS采用 “询问—回答”式脉冲测距原理实现距离测量,如图5所示。
机载应答机接收到地面询问设备的脉冲信号后,经过一个固定的延时,向地面询问设备发射回答信号。
询问信号经过时间和t1到达机载测距应答器,测距应答器经接收、解调、译码、固定延时τ′、编码、调制后发射应答信号,应答信号经过时间t2到达地面设备。
设Δt为地面系统发射询问信号到接收到应答信号之间的时间间隔,τ为信号在机载测距应答器中传输、处理和固定延时τ′的总和,不同测距应答器传输、处理信号的时间可能有差异,可以通过调整固定延时τ′,保证不同测距应答器总延时相同,即τ为常数。因此飞机距跑道着陆点的斜距R为:

式中,C为电波传播速度。
3.4TLS测距过程
TLS测距电路主要由中央处理器、编码器、发射机、接收机、译码器、距离产生器和同步信号单元组成,如图6所示。

图5 TLS测距原理图Fig.5 Range measurement of TLS
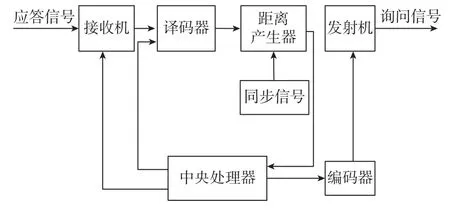
图6 TLS测距原理框图Fig.6 Range measurement block diagram of TLS
中央处理器控制编码器进行编码,编码后产生一个事先约定的脉冲码输出到发射机发送给飞机,进行测距询问。机载应答器接收到询问信号后处理并发射应答信号,接收机接收到飞机的应答信号,由译码器首先进行译码,译码器将事先符合约定的脉冲译码后送到距离产生电路,和同步信号进行比较后产生反映距离信息的方波信号,该信号送入中央处理器进行距离计算,得到飞机的距离信息。
4 TLS的应用特性
目前,TLS可在云底高61m、能见度约800m的恶劣天气及夜间飞行使用,是FAA认可的I类精密进近着陆系统,具有下列特性:
1)TLS可胜任复杂地形条件下的工作,它精确的校准系统极大地降低了地形对导航精度的影响,且占地小,土建投资很少,安装地点灵活,尤其适合于山区机场。
2)TLS可采用非线性方式进近[2],可移动飞行路径来避开地面障碍物,可最大偏离跑道中心线15°进近。
3)TLS则可以模拟航向台、下滑台和多达6个指点标台信号。
4)TLS采用数学模型描述航迹,使用数据库存储ILS参数,利用数学方式确定已知飞机着陆点的相对航迹并数字化模拟进近,在整个进近过程中确定与ILS相同的坐标。
5)TLS具有部分类似于雷达的功能,可使用软件对飞机进近过程进行记录和回放。
不难看出,作为I类精密进近导航系统,TLS显然更适合于那些地形较复杂的支线机场。它独具对地形要求灵活、非线性进近和最大偏移15°进近这三大优势,再加上简便的安装和与ILS兼容的机载设备这两个特点,使得它非常受机场当局和航空公司的欢迎,利用数学模型模拟进近航迹还具有较高的安全性。
5 结论
TLS作为一种新型的精密进场着陆引导系统,弥补了ILS的不足与缺点,为未来的机场导航、灾难救援、战场支援等提供可靠的保障。TLS应用ILS已有的接收机、显示器和雷达应答机,不需要再添加新的设备,节约了成本,缩短了飞行员对新系统的培训时间。TLS是以应答机为基础的Ⅰ类着陆系统,大大地提高了机场和航站的可用性,对场地环境的要求很低,尤其适用于自然条件比较恶劣的民用机场和军用移动导航。就我国的实际情况来看,大部分地区的自然环境和机场建设条件十分有限,采用TLS将会为我国的军民用机场建设奠定坚实的基础。
[1] Transponder-based precision approach guidance system [Z].323cool ed1-vo,ANPC,USA,2003.
[2] Winner K,Kuehn B R.Transponderlanding system[P]. United States Patent,US469654B1,2002.
[3] 魏童,周涛.应答着陆系统简介[J].空中交通管理,2003(2):37-39. WEI Tong,ZHOU Tao.Summary of transponder landing system[J].Air Traffic Management,2003(2):37-39.
[4] 张尉,徐炎祥.二次雷达原理[M].北京:国防工业出版社,2009. ZHANG Wei,XU Yan-xiang.Principle of the secondary rader[M].Beijing:National Defense Indutry Press,2009.
[5] 黎廷璋,张德馨.空中交通管制机载应答机[M].北京:国防工业出版社,1992. LI Ting-zhang,ZHANG De-xin.The air traffic control airborne transponder[M].Beijing:National Defense Industry Press,1992.
[6] Karl Winner.Application of thetransponder landing system to achieve airport accessibility[EB/OL].http://www. ANPC.com.
[7] 龚享銥,袁俊泉,苏令华.基于相位干涉仪阵列多组解模糊的波达角估计算法研究[J].电子与信息学报,2006,28(1):55-59. GONG Xiang-yi,YUAN Jun-quan,SU Ling-hua.A mutilpareunwrapambiguityofinterferometerarrayfor estimation of direction of arrival[J].Journal of Electronics &Information Technology,2006,28(1):55-59.
TLS—A New Landing System
YANG Yi-huan,LI Bing,CHEN Yang
(92187 Troops of PLA,Changzhi 046011)
Transponder landing system(TLS)is a transponder based precise approach landing system.It was recognized as CATI precise approach navigation system by FAA and reached the precision standard of ICAO.This paper introduced the composition,configuration and working process of TLS.It analyzed the angle and range measurement principle of the system.Then it expounded the application characteristics and main performance of the system.It also laid a solid foundation for the development of navigation system.
transponder landing system;angle measurement;range measurement;features
TN966
A
1674-5558(2016)01-01100
10.3969/j.issn.1674-5558.2016.04.004
2015-04-09
杨益欢,男,助理工程师,研究方向为无线电导航。