四轮移动机器人控制系统的设计
2016-09-22刘起兴吴钦木
刘起兴,吴钦木
(贵州大学电气工程学院,贵州 贵阳 550025)
四轮移动机器人控制系统的设计
刘起兴,吴钦木
(贵州大学电气工程学院,贵州 贵阳 550025)
针对一些中小企业机器人应用的实际情况,设计了一个四轮移动机器人控制系统,该系统由微控制器模块、电机驱动模块、传感器模块与无线通信模块组成.微控制器模块是控制系统的核心,能无线接收监控平台传来的指令信号,通过传感器模块实时采集机器人移动路径及其障碍物信号,进行数据分析与处理,通过电机驱动模块控制机器人循迹运动.实验表明该控制系统结构简单,性能可靠,对四轮移动机器人进一步发展有借鉴作用.
移动机器人;控制系统;微控制器;电机驱动;传感器
四轮移动机器人是以4个车轮作为移动方式的一种机器人,其研究技术涉及路径规划、导航定位与运动控制等.四轮移动机器人因运动平稳、速度快、承载能力大等特点,在军事、工业、商业与农业等方面广泛应用,成为世界各国科技工作者研发的一个热点.美国Stanford大学研制的四轮移动机器人Stanford Card,用视觉传感器探测地面上的轨线信号,能按照预先设计的路径做循迹运动.[1]美国NASA研制的四轮移动机器人Nomad,能接收GPS信号,通过遥控执行在南极寻找陨石的工作.[2]IROBOT 公司研制的吸尘器机器人ROOMBA能避开障碍,完成室内清扫任务.[3]我国移动机器人的研究起步虽晚,但国家高度重视,把机器人的研发列入了“863”高科技发展规划,发展迅速.中控科技集团研制的海宝机器人能提供迎宾服务,也能为游客提供指路导航服务.[4]2013年玉兔机器人登陆月球,其具有爬坡与越障能力,完成了对月球表面的地理探测任务.虽然我国机器人的科技研究取得了一些重大成果,但目前中小企业对移动机器人的研发与应用水平还有待提高.
本文针对一些中小企业机器人应用的实际情况,设计了一个四轮移动机器人控制系统,它能按预先规划好的路径移动,绕过障碍物,到达目标地.
1 总体设计

图1 控制系统总体设计
本文设计的四轮移动机器人控制系统能够完成三项任务:一是路径规划,用锡箔纸铺设机器人的移动路径,在路径上放置一些障碍物以增加机器人移动的难度;二是导航定位,用传感器探测锡箔纸路径及其障碍物信息,传递给机器人控制系统;三是运动控制,机器人控制系统把传感器检测到的路径信号与目标信号相比较,进行分析处理,发送指令给执行机构,驱动机器人前进、后退、转向,沿着规划好的路径移动,最终达到目标地,其总体设计方案如图1所示.
图1中,微控制器是整个控制系统的核心,其接收监控平台指令与传感器模块传来的信息,并进行相关的数据运算与处理;传感器模块负责机器人移动过程中路径的识别与障碍物探测;电机驱动模块驱动直流电机,实现机器人的速度和位置控制;电源模块给机器人控制系统的各个模块供电,保证控制系统能正常工作.
2 硬件设计
为了提高效率,移动机器人控制系统设计采用了模块法,整个系统分为微控制器模块、电机驱动控制模块、传感器模块与无线数据通信模块.
2.1微控制器模块
设计选用ATMEL公司的ATmega128单片机作为控制系统的核心,其结构如图2所示.
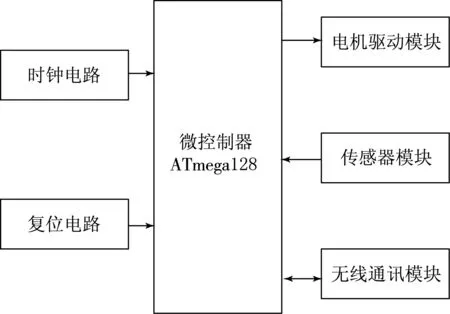
图2 微控制器接口电路
ATmega128是一款高性能、低功耗的8位高档AVR微控制器,芯片内包含128 kB的可编程Flash程序存储器,6个8位的并行I/O口,2个串行USART,支持JTAG和ISP编程.时钟电路由1个16 MHz的外部晶振与2个22PF的瓷片电容组成,其负责为控制系统提供时钟源.复位电路包含上电复位与手动复位,当微控制器受外界干扰程序跑飞时其有重启功能.电机驱动模块接收微控制器的指令,驱动直流电机控制机器人运动.传感器模块探测机器人外部环境信息,传递给微控制器分析处理.无线通信模块建立微控制器与监控平台的沟通渠道,负责两者之间的通信任务.
2.2电机驱动模块
电机驱动模块驱动直流电机,控制机器人运动.选择直流电机的型号为RS365SH-14713A,用12V的锂电池供电,为移动机器人的驱动控制提供了方便.
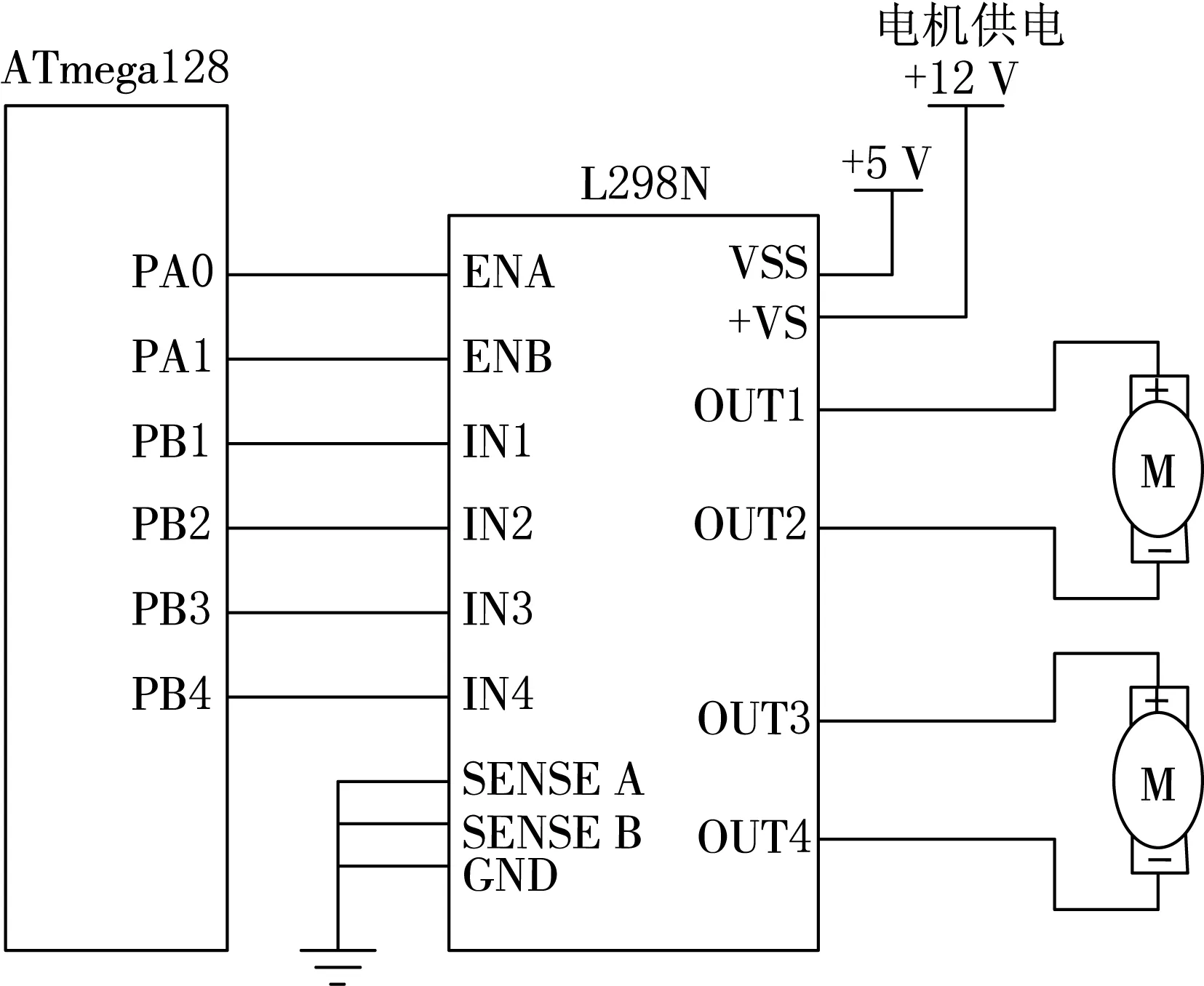
图3 直流电机驱动电路图
电机驱动芯片选择了L298N, 为SGS公司产品,内含2个H桥驱动器,可以驱动2个直流电动机,其驱动电路如图3所示.+VS引脚接直流电机的+12V电源, 引脚OUT1,OUT2之间, OUT3,OUT4之间可分别接直流电机M, 引脚IN1、IN2、IN3、IN4分别连接ATmega128的IO引脚,以控制直流电机的正反转.ENA,ENB是控制使能端,控制电机的停转, L298N的功能逻辑真值表如表1所示.
直流电机的控制通过脉冲宽度调制(PWM)实现,PWM 信号由ATmega128单片机产生,用脉冲计数方法调整 PWM 信号脉宽的占空比,通过占空比的调控实现直流电机的调速,直流电机两端的平均电压按下式进行计算.
U=D×US.
(1)
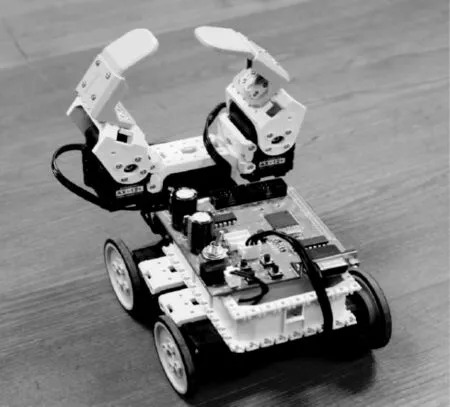
其中:U为直流电机电枢两端的平均电压;US为加在直流电机电枢两端的电源电压;D为占空比,取值范围是0 表1 L298N的功能逻辑真值表 2.3传感器模块 传感器模块有识别机器人移动路径与探测障碍物的功能,并把检测到的信息上传给微处理器.机器人的移动路径用锡箔纸铺成,选择涡流传感器(LJ8A3-2-Z/AY型)作为路径识别元件,把2个涡流传感器安装在机器人前端下方.涡流传感器用锡箔纸的金属特性,动态监测路径的位置,实现循迹运动.障碍物与终点目标用黑块标识,选择红外传感器作为障碍物与终点目标的探测仪器,安装在机器人的正前方.红外传感器把检测到的光信号转变为电信号,确定出障碍物的位置.[7-8] 2.4通信模块 无线通信模块是移动机器人与监控平台连接的信息纽带,在移动机器人控制系统中十分重要.选择深圳普联技术有限公司的产品(TP-LINK)实现WIFI无线数据通信,它符合802.11 b标准,传输速度达到11 MB/s,信号覆盖半径达到100 m. 控制系统采用C语言编写程序,主要完成路径识别、障碍物躲避与控制机器人移动.机器人控制系统把收到的监控平台指令与传感器检测到的路面信号分析处理,发送指令给直流电机驱动模块,控制机器人按规划好的路径循迹移动,其流程图如图4所示. 图4 机器人移动流程图 四轮移动机器人设计完成后进行了硬件与软件调试.硬件调试步骤为先对照电路图检查PCB电路板上有无连线错接、漏接与短路,再观察焊点是否牢靠,有无虚焊,再接通电源观察电路板上的指示灯状态及有无冒烟等,最后用万用表测量关键节点参数是否正常等.硬件检测合格后进行机器人装配,装配好的四轮机器人实物如图5所示.其结构简单,装配紧凑.四轮机器人最上面是绿色PCB电路板,如图6所示.板上可放置单片机芯片ATmega128与电机驱动芯片L298N等.车轮与PCB板间是一个连接结构,其内部置放了直流电机与电源等. 图5 四轮移动机器人实物图 软件调试以Proteus进行仿真实验,Proteus是一款单片机仿真与开发软件,可以模拟机器人控制系统的运行情况,节省开发成本.运用所提供的虚拟示波器、逻辑分析仪与信号发生器等虚拟仪器进行仿真实验,重点进行了直流电机驱动模块的仿真实验.改变占空比的值,直流电机电枢平均电压值随之变化,详细数据如表2所示. 表2 占空比与直流电机电枢平均电压的关系 分析表2数据得出,占空比越大,直流电机电枢两端的平均电压越大,反之亦然.实验表明驱动模块能够驱动电机移动,可靠性高,实用性强. (1) 本文设计的四轮移动机器人控制系统结构简单,成本低廉,抗干扰能力强,实验验证能够达到设计要求,能为四轮移动机器人的进一步研发提供借鉴. (2) 设计采用了模块法,把移动机器人控制系统分为微控制器模块、电机驱动模块、传感器模块与无线通信模块.设计中既考虑各个模块的衔接,又考虑每个模块的独立性,最后优化组合,提高了控制系统的设计效率. (3) 传感器模块性能良好,稳定可靠,涡流传感器能有效探测锡箔纸路径的信号,红外传感器能准确地发现障碍物信号. (4) 直流电机驱动模块产生的扭矩能够驱动机器人移动,响应快速,稳定可靠,但速度控制不够理想,需要进一步研究. [1]MORAVEC H P. Stanford Cart and the CMU Rover [J]. Proceeding of the IEEE,1983,71 (7):872-884. [2]Borenstein J,Everett H R,et al. Mobile Robot Positioning-sensors and Techniques [J].Journal of Robot Systems,1997,14(4):231-249. [3]Simmons R,Fernandez J L,Goodwin R. Lessons from Xaiver [J]. IEEE Robotics & Automation Magazine,2000,7 (2): 33-39. [4]孙宏宇.基于的轮式机器人控制系统设计[D].大连:大连理工大学,2013:5-31. [5]温箐笛.轮式移动机器人直流伺服控制系统设计[J].科学技术与工程,2012,12(25):6482-6486. [6]周慧君,韩军.基于51单片机的轮式移动机器人控制系统设计[J].现代设计与制造技术,2013,10:123-124. [7]王文凭,李天培,冯根生.一种智能搬运机器人的设计与实现[J].计算机测量与控制,2011,19(2):395-398. [8]杨俊驹,林睿,王振华,孙立宁.轮式移动机器人运动控制系统研究与设计[J].现代电子技术,2016,39(2):22-27. (责任编辑:石绍庆) The control system design of mobile robot with four-wheel LIU Qi-xing,WU Qin-mu (Institute of Electrical Engineering,Guizhou University,Guiyang 550025,China) Mobile robot with four-wheel is widely used in military,industrial and commercial,its research and development has important scientific significance. The control system of mobile robot with four-wheel is composed of micro controller module,motor drive module,sensor module and wireless communication module,micro controller module is the core of the control system,which can receive through wireless way command signal from the monitor platform,which can real-time acquire path signal and its obstacles from mobile robot by the sensor module,through data analysis and processing,which can control the robot according to the preset trajectory through the motor drive module. Experiments show that the control system has simple structure,reliable performance,which is reference for the further development of mobile robot with four-wheel. mobile robot;control system;micro controller;motor drive;sensor 1000-1832(2016)03-0074-05 2016-06-12 国家自然科学基金资助项目(51367006). 刘起兴(1994—),男,学生;通信作者:吴钦木(1975—),男,教授,主要从事电动车驱动系统控制研究. TP 242[学科代码]0811 A [DOI]10.16163/j.cnki.22-1123/n.2016.03.014
3 软件设计

4 实验与调试

5 结论
