非接触式超声的航天器可视化指引泄漏定位方法研究
2016-09-22任国华李唯丹闫荣鑫孙立臣
孙 伟,任国华,李唯丹,闫荣鑫,孙立臣,李 征
(北京卫星环境工程研究所,北京 100094)
非接触式超声的航天器可视化指引泄漏定位方法研究
孙伟,任国华,李唯丹,闫荣鑫,孙立臣,李征
(北京卫星环境工程研究所,北京100094)
航天器在轨泄漏快速定位方法对确保航天员生命安全和航天任务的成功具有十分重要的意义,是保障航天器安全可靠的重要途径之一。针对空间站大型舱体结构为检测对象,以泄漏声学为理论基础,分析其泄漏超声在空间中的传播情况,探讨可视化非接触式超声漏点定位的方法,通过研制阵列式超声传感器与摄像头相结合的新型复合可视化探头,研究可视化引导算法,对比试验分析,验证了该方法的有效性和快速性。研究结果表明,该方法可有效确定漏点方向及位置,从视觉上直接引导人员向泄漏主方向巡检,节省时间,漏点定位精度为±20 mm。研究结果为空间站大型舱体泄漏快速检测提供了有效的方法,对航天器在轨泄漏定位策略的制定具有十分重要的指导意义。
超声;可视化;航天器;泄漏定位
0 引言
随着载人航天技术的快速发展,空间站等长期在轨运行航天器对其密封性能要求越来越严格;面对保障航天员和航天器安全的迫切需求,对航天器的在轨维护与服务能力提出了更高的要求。由于长期受到复杂的空间环境影响,空间站密封舱体及管路很可能发生泄漏,严重威胁飞行任务和航天员的生命安全,研究航天器在轨快速漏点定位方法是非常重要的[1-2]。NASA在2001年利用研发的便携式超声检漏仪UL101成功发现国际空间站的一个舱内的管道泄漏[3];美国Inficon公司开发了一款whisper手持式超声检漏仪。法国Synergys公司也开发一款可视化的检漏仪Leak Shooter,可实现检测现场的直接视觉显示。目前国外先进的超声检漏仪并不具备指引或引导功能,而国内还没有国产产品问市。许多单位只开展了一些声学检漏理论研究,北京卫星环境工程研究所率先针对航天器在轨检漏的需求,开展了对非接触式超声航天器在轨检漏技术及仪器的研究工作。重点从理论和实验研究分析非接触式超声可视化快速漏点定位方法,对未来大型航天器在轨快速检漏提供有效的技术途径。
1 理论分析
航天器密封舱体内发现泄漏时,气体在压力差的作用下从密封结构中沿泄漏通道向舱外真空环境泄漏,气体介质穿过微小孔径时,其流速较高,气体中包含大量的漩涡,气体漩涡间的相互作用的内应力使得其各体积元上受到了大小相等、方向相反的起伏力的作用,从而导致气体中属于四极子声源性质的声源产生。由于泄漏超声声源的形成机理和形成过程十分复杂,但整个泄漏过程仍然满足理想气体流动中的微小声波基本的连续性方程、动量方程、物态方程以及热传递方程;而泄漏引起的气体分子振动收到的阻尼作用只受黏滞性和热传导的影响;假设气体密度为ρ0,速度为v,时间为t,压力为p,比热比为r,动力黏度为η,体积黏滞系数ξ;按照斯托克斯气体计算,其体积黏滞系数ξ=0;利用瑞利声学比对方法,引入莱特希尔张量,则可得到速8模型可推得声功率为[4]:

式中:S为声传播方向的垂直接收面积,m2;K为莱特希尔系数;V为泄漏气体速度,m/s;c0为基准声速,331.45 m/s;
而整个泄漏过程设为绝热流动,按气体动力学原理,泄漏过程能量守恒,进而可推得其出口速度[5]:


而泄漏超声沿空气传播存在衰减效应,主要为吸收衰减、散射衰减和扩散衰减。前两者主要取决于媒质的特性,而后一类则由声源特性而引起。吸收衰减和散射衰减都遵从指数衰减规律,声压随传播距离的变化如式(4)[7]。

式中:a为衰减系数,dB/m;l为传播距离,m;psound为声压,Pa;p0为声源声压,Pa。这里的衰减系数是总衰减系数其等于吸收衰减系数和散射衰减系数之和。而扩散衰减主要考虑声波传播中因波阵面的面积扩大导致声强的减弱,取决于声源辐射的波形及声速状况而与媒质的性质无关。而泄漏超声在漏孔处因泄漏而形成的湍流和冲击,造成气体扰动,因其近场长度较短,故泄漏超声的扩散衰减是存在的,简化为球面波其声强衰减随波阵面半径r-2规律衰减[7]。
假设单位距离为x,沿轴向距离设为li,而径向距离为rj,如图1所示;因此,在一定的li和rj下的声功率如式(5):

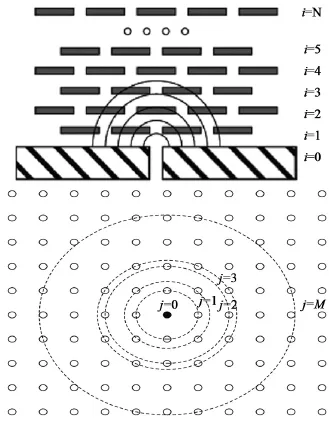
图1 泄漏声源的沿轴向和径向传播示意图
假设接收端换能器的入口面积为Sc,测量面和漏孔点源法线的夹角为θ,则检测到的泄漏超声功率则是该距离下li的声功率为:

从理论模型中可以看出,当载人舱体发生泄漏,舱体的厚度为L时,舱体体积为V,舱内初始压力p0,舱外为真空环境,在特定的测定距离li和测定方向θ,通过泄漏超声的声压或声功率监测,就可判定漏孔是否存在,且评估漏孔大小。
因此,一定距离下垂直于被检平面的漏点中心处声压值最大,在无外界影响各向同性的空间中,其声压值分布如图2所示,峰值处为漏孔中心位置。

图2 泄漏声源空间场分布示意图
2 可视化漏点定位方法分析
根据上述分析,在一定距离下的漏孔可通过巡检找到泄漏声源特征最大的位置及漏孔中心位置,而在未知漏孔位置的情况下,可利用多个探头与摄像头相结合的复合式探头,来分别检测不同空间中不同位置的泄漏声源特征值的情况,靠近漏孔的特征值越大,远离漏孔的特征值越小,形成向量梯度,指向特征大的方向则可认定为漏孔的主方向。
在便携式超声检漏设备的基础上,开发泄漏检测可视化指引模块;设计一种8路传感器和高清摄像头共同组成阵列式切换超声探头,实现对超声波的检测以及对检测实景实时摄像和引导结果的显示。阵列超声传感器探头如图3所示,具有S0~S7压电式超声传感器,摄像头安放在中间,摄像头的线路与传感器线路相互独立。8路超声传感器通过8路切换开关,由DSP定时触发切换,实现8路传感器信号经开关控制后单路分时传入高精度AD进而由DSP进行后续处理,其结果经对比通过串口将传输给ARM显示模块,每一路结果对应屏幕上的一个区域而摄像头接收到的视频信号传输给ARM显示模块。

图3 可视化超声探头示意图及实物图
在摄像模式下,屏幕会随着DSP接收到的超声探头的信号进行改变。将屏幕等分为3×3的9个区域,除中心区域外,其他区域与图4的8个传感器相对应。设8个传感器接收到的数值分别为S0~S7,接收到的信号经处理之后,将8路数据存为数组进行特征比对,判断变化趋势,从摄像屏幕中心指向趋势最大的区域,实现指引效果,如图5所示。

图4 可视化指引方法示意图
在检测过程中,沿指示方向进行巡检,当||S0-S4|-|S2-S6||<M时,M值根据漏率指标的具体设定,判定漏孔中心位置,则中间部分指示在摄像图像上显示出中间灰色框,如图5所示。
图5 中间值最大时屏幕状态图
3 试验测试
3.1泄漏声源测试试验
利用Φ400 mm密封容器平台模拟在轨的压力边界条件,容器平台持续提供一个真空环境,将试验室环境类比于舱内的大气环境。在该压力边界条件下,试验室的大气将通过安装在密封容器上的通道型漏孔(包括0.3 mm、0.4 mm、0.8 mm、1.0 mm 和2.0 mm)向容器内的真空环境泄漏,试验人员则可利用超声在轨检漏系统在试验室的大气端进行检测。便携式超声在轨检漏仪被固定在三维四自由度的平台上,通过沿X、Y、Z移动在一定距离上通过不同方向的偏移量检测,实验系统如图6所示[8]。
采用检测仪垂直于舱体壁面移动的巡检方式,其漏孔中心位置的声压值最大如图7、8所示,即可确定漏孔的位置。

图6 超声泄漏检测理论分析试验系统图
上述试验结果与理论分析相一致,在漏孔中心位置上存在高峰,在径向方向上在各项同性的空间中,其声压按照近似1/r(W∝P2)规律衰减。因此,在不同的径向距离上的声压幅度是具有明显差异性的,说明了阵列式的探头在空间中不同位置检测到的同一泄漏源的声信号是具有差异的,且因衰减是单调的,其泄漏源方向幅度比远离泄漏源的位置信号强,根据这样的梯度,即可给予指向性。

图7 不同漏孔X方向上水平偏移量的泄漏超声压试验图

图8 不同漏孔Z方向上垂直偏移量的泄漏超声压试验图
3.2漏点定位试验
以壁板结构的漏孔为试验对象,分别利用巡检方式和可视化指引方式对不同的漏孔进行多次测试试验,验证可视化指引检漏方法的正确性,试验系统及巡检的定位方法如图9所示,设备移动速度平均为5 mm/s,整个试验板为尺寸为Φ420 mm。平板上共加工5个漏孔,通过测量得到不同的漏孔孔径,分别为0.3 mm、0.5 mm、1.0 mm、1.5 mm,2.0 mm,其壁板厚为2.5 mm。两种方法首先都按照图9的轨迹进行检测,可视化指引方法则根据指示进行方位走动,若无报警指示显示,则依然沿图9轨迹走。分别进行单一漏孔检测试验,记录用时、定位误差、漏孔个数等,试验结果如表1所列。

图9 超声漏点定位测试试验图

表1 漏点定位试验结果(平均结果)
根据实验分析,可视化指引漏点定位方法比巡检漏点定位方法耗时少,定位快速,两种方法的准确性均较高,无漏检现象,定位精度均在±20 mm内,巡检方式精度略高。相比之下,检测小漏孔时,巡检和可视化指引方法检漏时间相差约为30多秒,而在检测大漏率时,时间优势较为突出,主要由于漏孔越大,泄漏超声信号越强,其中心与周围的背景差异性越大,在空间中形成的梯度较为明显,可快速确定主方向,检测出漏孔位置;而定位精度方面主要是由于该新方法的探头中心并未有超声传感器,是由四周相邻的传感器检测结果差异性来确定中心位置的,因此,漏孔位置的确定存在一定的误差±20 mm。
4 结论
非接触式超声可视化指引漏点定位方法为理论分析提供了依据,建立了泄漏超声的理论模型,并通过试验研究,分析了理论模型的正确性和合理性,证明了可视化指引漏点定位方法的可行性;通过漏孔定位试验,验证了该新方法的快速性,在检测大漏、大面积情况下更具优势,可节约近50%的时间,其定位精度可达±20 mm;研究结果为实现航天器在轨快速漏点定位提供技术支持。
[1]綦磊,孙伟,孙立臣,等.非接触式超声泄漏检测系统设计及试验验证[J].航天器环境工程,2014,31(2):212-216.
[2]王凡,陈光奇,王荣宗.航天产品常用泄漏检测方法[J].真空与低温,2012,18(4):235-240.
[3]HooverA.Maryland CompanyExpandingTechnologyin Space-NASAWon'tLeave EarthwithouttheCTRLUL101[R].CTRL Systems,Inc,2002.
[4]马大猷.现代声学理论基础[M].北京:科学出版社,2005: 293-310.
[5]陈卓如,金朝铭.流体力学[M].北京:高等教育出版社,2004:410-411.
[6]闫荣鑫,孙伟,李唯丹.便携式舱内超声检漏仪的研制[J].中国空间科学技术,2015,6(3):58-61.
[7]冯若.超声手册[M].南京:南京大学出版社,2006:17-27.
[8]SunW,Yan RX,Sun LC,etal.Evaluationofinfluence factors on the portable ultrasonic leak detectionmethod for the space station on orbit[C]//Advances in Engineering Materials and Applied Mechanics:Proceedings of the International ConferenceonMachinery,CRCPress,2015:71.
STUDY OF THE VIDEO GUIDABLE LEAK LOCATIONMETHOD FOR SPACECRAFT BASED ON THEUN-CONTACT ULTRASONIC TESTING
SUNWei,REN Guo-hua,LIWei-dan,YAN Rong-xin,SUN Li-chen,LIZheng
(Beijing Instituteof Spacecraft Environment Engineering,Beijing100094,China)
It is very important to study the fast leak locationmethod for the on-orbit spacecraftand astronaut safety. The space station cabin was the studying object.And themethod research was based on aero-acoustic theory to analysis leak ultrasonic resource distribution in the space.And thismethod was researched by designing new complex sensor of array ultrasonic sensor and video sensor and studying the video guide leak location arithmeticmethod.Then,itwas validated that thismethod was speedy and effective by the experiments research.The research conclusions indicate that the video guide leak location method can guide the leak orientation and find the leak position.The result can lead handler to the main leak orientation find the leak to reduce the detection time.And themethod location accuracy is±20 mm.Thismethod is very fit for the space station huge cabin leak detection on orbit to improve efficiency.It is very significative for spacecraft leak detection operation on orbit.
ultrasonic;video guide;spacecraft;leak location
TB77
A
1006-7086(2016)03-0143-05
10.3969/j.issn.1006-7086.2016.03.004
2016-01-20
国家自然基金(U1537109)和载人航天预先研究(020109)
孙伟(1984-),男,辽宁省凌源人,工程师,硕士,主要从事航天器真空与检漏技术研究。E-mail:sunwei84@163.com。