MEMS惯性测量单元减振系统仿真分析
2016-09-22孙丽艳张承亮
孙丽艳,张 帅,杨 亮,张承亮
(北京航天控制仪器研究所,北京100039)
MEMS惯性测量单元减振系统仿真分析
孙丽艳,张帅,杨亮,张承亮
(北京航天控制仪器研究所,北京100039)
MEMS惯性测量单元使用MEMS仪表作为角速度和加速度传感器,该传感器对振动和冲击敏感,会引起惯性测量单元的测量误差。MEMS惯性测量单元多用于飞机、炸弹、导弹等振动环境恶劣的地方,因此减振器的设计尤为重要。减振器设计首先要明确惯性测量单元所处的振动环境,其次要明确MEMS惯性测量单元敏感的频点,最后明确惯性测量单元的质量、安装形式。设计了一种用于MEMS惯性测量单元的减振器,减振效率达75%,对振动和冲击均起到衰减的作用,衰减频带展宽,且在峰值的放大倍数低于3.5。
MEMS惯性测量单元;振动;冲击;减振器
0 引言
市场上小型化惯性测量组合的需求越来越大,MEMS惯性测量单元基于小型化的MEMS仪表在小型化方面有着无可替代的优势,然而,惯性测量单元多用于如飞机、炸弹、导弹等环境恶劣的场合。MEMS仪表内部为机械结构,对外部振动环境敏感,在振动环境下,MEMS仪表会有很大的测量误差,由此影响到惯性测量单元的精度。减振器的设计能够隔离外界振动环境,提高信噪比及传感器精度。减振器设计首先需确认惯性测量单元所处的振动环境,其次应使减振器频率避开MEMS仪表的采样频率,最终依据惯性测量单元的整体结构形式确定减振器的安装方式及变形量。
基于MEMS仪表的特性,多个文献中对于MEMS IMU减振器频率一般设置为大于200Hz小于300Hz[1-4],该频率范围既能保证MEMS仪表在振动环境下的精度,又能保证MEMS IMU静态标定的精度,并且减振器设计多是按压橡胶减振圈形式。该种形式减振器无法保证减振器位于系统质心位置,起不到很好的减振效果,且装配过程较复杂。本文提出的减振器是外减振形式,结合专用的对外安装螺钉,由上、下两个减振垫组成。
1 减振器设计参数
1.1外界振动环境
减振器设计首先需考虑IMU所处的振动、冲击环境。减振器变形量的理论公式为[1]:

其中,Xs为减振器的变形量;A为外界加速度量值,单位为g;g为地球重力加速度值。外界振动量级一定时,减振器变形量越小,减振器频率越高;减振器频率一定时,外界g值越大,变形量越大。已知IMU所处的外界振动、冲击环境如表1所示。
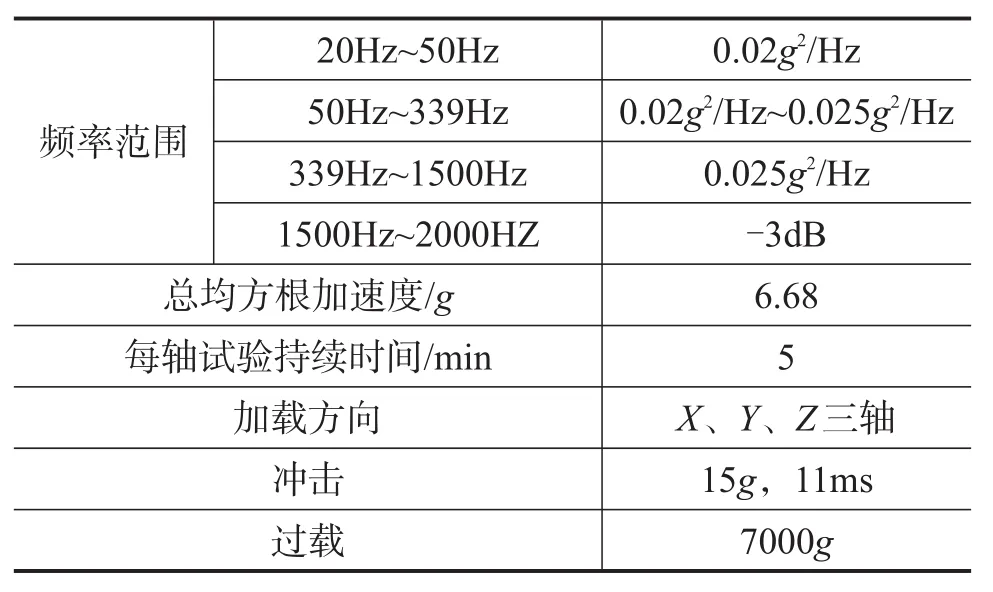
表1 IMU所处外界振动、冲击环境量值Table 1 Exterior vibration environment
其次,减振器的阻尼比也是比较重要的参数,振动传递率的理论公式为[1]:

综合以上分析可知,减振器频率的确定需综合考虑减振器的变形量,外界g值、减振器的衰减量及峰值的放大倍数。
1.2MEMS传感器的参数
减振器的本征频率的确定需确保不影响传感器的工作频率,需避开其测量范围和带宽,而且需小于1/2的传感器的采样频率。该IMU选用的MEMS仪表的指标为:
陀螺仪测量范围:≥±300(º)/s,带宽:≥50Hz。加速度计带宽:≥500Hz。
1.3IMU固定方式
为提高减振效果,IMU固定方式拟采用空间三点腰部安装的方式,减振系统采用外减振方式,且减振器位于系统质心位置,为保证静态标定的精度,减振器的变形量拟控制在0.5mm以内。
综合考虑以上三个方面,拟确定减振器本征频率为200Hz,减振器的变形量为0.3mm。
2 减振系统的设计
2.1本体的结构设计
本体采用三点腰部固定方式,结构形式如图1所示。
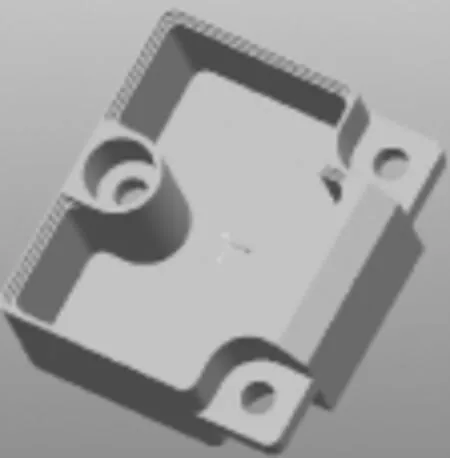
图1 本体结构示意图Fig.1 Sektch of noumenon
模态是结构的固有振动特性,每一个模态具有特定的固有频率、模态振型。振动模态是弹性结构固有的、整体的特性。如果通过模态分析方法搞清楚了结构在某易受影响的频率范围内各阶主要模态的特性,就可能预测结构在此频段外部或内部各种振源作用下的实际振动响应。同时在振动系统中,系统的固有频率和固有振型是分析动力学响应和其他动力特性的基础,因此,模态分析是动态设计重要方法。下面利用有限元对本体进行模态分析,以了解本体的振动特性,所得前6阶模态如图2所示。

图2 本体前六阶模态仿真结果Fig.2 Mode simulation result
由图2可知,本体固有频率很高,最低固有频率都达到了9062Hz,而IMU试验频率范围为20Hz~2000Hz,不会影响IMU的正常工作,满足使用要求。
2.2减振器的结构设计
系统采用外减振形式,为实现小型化,减振器由上、下橡胶垫和专用螺钉组合而成,其装配关系如图3所示。
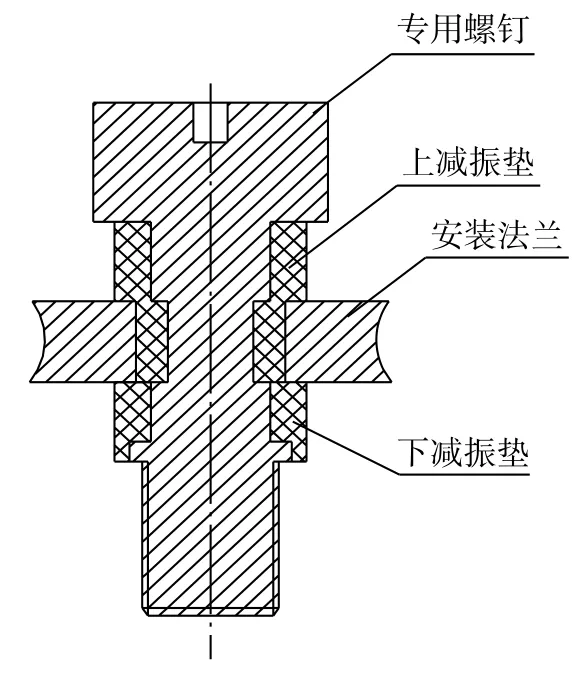
图3 减振器装配示意图Fig.3 Sketch of damping instrument
各个分结构的尺寸可通过计算刚度、阻尼等进行优化设计。综合考虑系统结构尺寸的限制,减振器结构各组成部分结构形式如图4所示。

图4 减振器各组成部分示意图Fig.4 Sketch of damping component
安装减振器后对系统振动性能进行仿真,模型如图5所示,施加的随机振动条件如表1所示。振动方向沿固定螺钉轴向方向,主要关注印制板处的响应,因此响应监测点如图5所示,仿真时,三个减振器可用三方向等刚度,频率为200Hz的弹簧模拟。

图5 减振器力学性能仿真模型Fig.5 Simutation model of damping instrument
仿真得出该方向的响应谱如图6所示。从图6中可以看出,在频率为194Hz左右出现尖峰即放大点,放大倍数约为5,在频率为247Hz左右开始衰减,总均方根加速度为2.05g,对比表1输入条件,减振效率达70%。满足使用要求。仿真结果表明该减振系统及减振器参数的设置是有效的。
3 结论
对已知的外界振动环境和总体要求的振动衰减量可以有效地确定减振器的频率及各项参数,本文设计的MEMS惯性测量单元减振系统可以有效地减小外界振动环境对IMU精度的影响,减振器变形量的合理设置在保证IMU静态标定精度的同时又能实现小型化。仿真结果表明减振器满足使用要求。
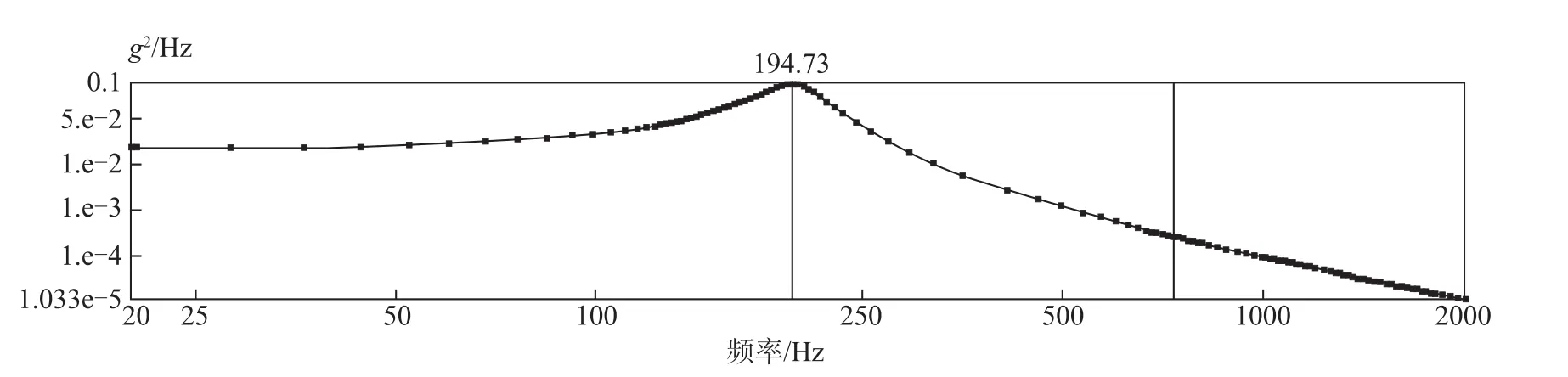
图6 减振系统监测点响应谱仿真结果Fig.6 Simulation result of damping instrument
[1] Braman T,Grossman O.Designing vibration and shock isolation systems for micro electrical machined based inertial measurement units[C].Position,Location,and Navigation Symposium,2006 IEEE/ION,IEEE,2006∶400-404.
[2] Braman T L,Riesgraf M J,Hagenson D J.Compact vibration isolation system for an inertial sensor assembly [P].US6578682 B2,Jun.17,2003.
[3] Davis B S.Using low-cost MEMS accelerometers and gyroscopes as strapdown IMUs on rolling projectiles[C]. Position,Location,and Navigation Symposium,IEEE 1998,IEEE,1998∶594-601.
[4] Braman T L,Hagenson D J.Isolation system for an inertial measurement unit[P].US,EP1788277,May 24,2007.
[5] Scaysbrook I W,Cooper S J,Whitley E T.A miniature,gun-hard MEMS IMU for guided projectiles,rockets and missiles[C].Position,Location,and Navigation Symposium,2004,PLANS 2004.IEEE,2004∶26-34.
[6]李杰,刘俊.制导弹药用微惯性测量单元结构设计[J].兵工学报,2013,34(6)∶711-717. LI Jie,LIU Jun.Design of micreo-electromechanical systems inertial measurement unit structure for guided ammunition[J].ActaArmamentarii,2013,34(6)∶711-717.
Simulation of an Isolation System for MEMS Inertial Measurement Unit
SUN Li-yan,ZHANG Shuai,YANG Liang,ZHANG Cheng-liang
(Beijing Institute ofAerospace Control Devices,Beijing 100039)
MEMS inertial navigation measurement unit(IMU)is composed by MEMS instruments,which used as angel and acceleration sensors,these sensors are sensitive to vibration and shock,which will result in output error of the IMU.MEMS IMU is usually used in plane、bomb and missile,whose vibration environment is terrible.As a result,the isolation system is very important.When designing an isolation system for the IMU,we must first acquire a good definition of the shock and vibration environment to which the IMU will be exposed.Then we must determine the frequencies and levels to which the MEMS sensors are sensitive.Finally,we must have knowledge of the IMU properties such as resonant frequencies,mass properties,clock frequencies,fixed format,etc.In this paper,a well designed isolation system is designed,which will be capable of protecting the MEMS sensors while maintaining IMU performance throughout all specified environments.
MEMS inertial navigation measurement units;vibration;shock;vibration isolation system
U666.1
A
1674-5558(2016)01-01049
10.3969/j.issn.1674-5558.2016.02.007
2014-12-12
孙丽艳,女,博士,高级工程师,研究方向为捷联惯性导航系统。
