自动导引车在工业4.0中的应用
2016-09-22尚俊云暴海宁冯艳丽
尚俊云,暴海宁,冯艳丽,胡 静
(中国航天科技集团第九研究院第十六研究所,西安710100)
自动导引车在工业4.0中的应用
尚俊云,暴海宁,冯艳丽,胡静
(中国航天科技集团第九研究院第十六研究所,西安710100)
随着工业4.0概念的逐步成熟,智能化工厂、智能化生产以及智能化物流将是未来很长一段时间的发展模式,传统的制造企业会面临智能化的升级和转型。在此背景下,从提高工业化生产的自动化程度的角度入手,在生产流水线中引入自动导引车。然后针对每一种导航方式分析其优缺点,并且结合现代化生产方式的特点,通过对具体的应用案例进行分析,从原理上重点阐述了激光导引的情况,同时分析了自动导引车(AGV)的发展趋势,为企业后续在选择适合自身特点的自动导引车方面提供了参考。
工业4.0;工业自动化;自动导引车;导引方式;激光导航
0 引言
学术界和产业界将工业4.0的出现看作是以智能生产制造为主要标志的第四次工业化革命。与机械化、电气化和自动化为标志的前三次工业革命不同,它的革命性主要体现在工业化的生产方法方面,即并不局限于某一种特定技术,而是在信息通信技术基础上,通过充分挖掘数据,并结合物理信息系统的配套支持,将传统的制造业进行智能化升级和转型。它主要包含三个方面的内容:首先是“智能化工厂”,重点研究的方向是智能化的生产过程及智能生产系统在工业领域的应用,以及网络化分布式生产设施在工业流水线上的实现;其次是“智能化生产”,主要涵盖企业的物资管理领域、人机交互领域以及3D打印技术在自动化工业生产过程中的应用领域等;最后是“智能化物流”,主要是指通过互联网、物联网以及物流网,整合企业从原材料储备到用户手中的产品过程中的物流资源,大幅度发挥现有物流资源网络,提升供应方的生产效率,使中间用户和最终用户都能够快速获得与之匹配的服务,得到物流系统的支持。
随着工业4.0技术的高速发展,工业自动化也得到了长足的发展。工业自动化装备作为智能设备的重要组成部分之一,隶属于国家“十二五”计划以及“十三五”计划期间得到重点扶持和发展的战略性新兴产业[1-3]。在未来一段时间里,随着有效劳动力的减少、生产原材料价格以及能源价格的大幅上涨,传统意义上的中国制造业将会经历一段由低附加值的粗放型生产方式向高附加值的集约型生产方式的逐步转变。工业自动化装备作为高端制造业的“基石”,在新时期面临着传统产业升级改造以及新兴产业高速发展的双重机遇,高端智能装备在行业内获得了高速的增长。前期渗透率较高的数控机床、过程自动化系统、变频器等产品增速在明显放缓,而随着低端劳动力成本加速上行、产业升级进入白热阶段,“替代人工”属性更强、前期渗透率较低的“高端智能装备”(如工业机器人、自动化装配线、自动化仓储设备等)有望越过产品导入期,直接进入高速成长期,甚至能够保持年均20%~30%的快速增长。
自2013年以来,中国工业机器人市场表现强劲,市场容量不断扩大,一些大型跨国公司开始逐步进军中国的机器人市场,这一发展动向引起了行业内部相关协会的注意,国内新兴机器人战略产业研究机构近期发布的产业投资报告认为,2014年会是工业机器人的元年,国内工业机器人产业将迎来跳跃式的增长[4-7]。
1 自动导引车
在机器人产业迎来飞速发展的大背景下,传统的物流配送方式和生产方式正在向自动化和智能化的方向发展。在这种发展要求下,柔性制造系统(Flexible Manufacture System,FMS)、物料输搬运系统(Material Handling System,MHS)以及立体化智能仓储系统(Stereoscopic Warehouse System,SWS)应运而生,而且随着相关概念和技术的不断发展,这三个系统相互协调,在现实的工业化生产中得到了越来越广泛的应用[8]。随着工业4.0概念的逐渐成熟,它蕴含的是一种由集中式控制系统向分散式强化型控制系统的模式转变,主要任务和目标是营造出一个高灵敏度和高可靠性的环境,构造出个性化和数字化的工业产品与社会服务的生产模式。在这样的生产模式下,以往不同行业间的界限将逐步淡化,使得21世纪制造业将进入一个新阶段,智能化制造正逐步成为企业的主要发展模式,能否把握市场机遇研发设计出新一代的产品,并且更进一步提高企业的生产效率将会是企业在激烈的市场竞争中取得胜利的关键途径。
工业自动化是指生产过程或机器设备在无需人工直接参与的条件下,能够依照预先设定的任务实现测量、反馈及操作等信息处理任务和过程控制任务的统称。其核心是自动化技术,它是不断探索和研究如何更快速、平稳、准确地实现自动化生产过程的技术和方法;它是一门综合性技术,涉及机械、微电子、计算机等多方面技术领域。按照自动化发展的过程而言,工业革命的出现是自动化技术发展的助产士,正是因为工业革命提出进一步的需求,自动化技术才能够冲破现有的束缚,得到蓬勃高速的发展,同时工业自动化技术的不断发展也在一定程度上促进了工业的进步。
如今,随着科技的发展和各种技术的集成化和通用化,自动化技术已经在机械加工制造、信息技术、电力设施、建筑施工、交通运输等多个领域得到了十分广泛的应用,成为了提高企业和社会劳动生产率的最重要的手段。与此同时,工业自动化技术还是现代工业发展的重要特征之一,工业化生产企业只有通过不断推广应用自动化控制技术,才能够在提高产品质量及劳动生产效率的同时,节省劳动力成本、降低生产过程中的原材料和能源的消耗,并且确保整个生产环境及过程处于安全可控的状态中。根据权威部门统计可知,企业对自动化生产设备及自动化系统的投入资金与生产效益提升所得的产出收益比例一般可高达1∶4~1∶6[9-11]。得益于机械制造产业的不断升级以及国内经济的蓬勃高速发展,由最近的一个五年计划的完成情况可以看到,国内的工业自动化行业得到了飞速的发展,年均增长率达到了两位数。截至2015年底,中国国内的工业自动化市场的规模已经达到了943亿元[6]。自动导引车(Automated Guided Vehicle,AGV)在生产制造系统中的柔性程度较高,同时具有较好的适应性以及较高的可靠性,能够实现生产全过程和搬运移载任务的自动化,由于其集成性较高,在很多行业都得到广泛的发展及应用。在中国,目前能够生产AGV的企业越来越多,随着自动化生产、存储以及运输在各行各业的的不断深入和发展,对AGV系统的应用需求也越来越大,同时对AGV的需求也多种多样[12-13]。
原美国物流领域的协会对自动导引车(Automated Guided Vehicle,AGV)的概念是这样描述的:AGV是自身装备有电磁导引或光学导引等自动导引设备,可以沿着规定的路径行驶,并完成转弯、停车等系列功能,同时还应该具有编程设备、安全保护功能以及各种移载功能的运输车辆。AGV组成示意图如图1所示,它是一种依靠酸铅电池为动力来源的轮式智能机器人,被广泛应用于自动化生产线和港口、机场的行李物品传送以及仓储物流的物料流转,为生产系统的集成化、柔性化以及高效稳定的运行提供了重要保证[14]。自动导引车能够在物流系统或者自动化生产线中完成物料搬运、转移、输送的任务,是整个工业生产自动化控制系统和物流运输自动化系统的最核心组成部分之一。它属于一种复合控制系统,能够依据感知到的周边环境情况作出实时连续动态决策,由运动控制系统对车体的行进过程进行控制操作,能够满足生产制造企业的FMS、MHS 和SWS的需求。由于自动导引车具有自主规划路径、可编程和可协调作业等特点,它将成为敏捷制造生产装备及系统的重要组成部分,为传统的生产制造企业向柔性化敏捷制造企业的跨越式飞速发展提供技术理论的支持。随着现代化科技水平的高速发展,以AGV为代表的柔性运输系统和无人化工厂得到了广泛的应用,已经在智能港口、机场和自动化立体仓库等物流枢纽场所获得了可观的经济效益,日益显示出巨大的优越性。根据相关统计数据可知,在现代生产制造业中,企业用于物料转移及传送所耗费的时间占总时间的70%~80%,物料传送、转移与存储所花的费用占生产加工总费用的30%~40%,由此可见,对于制造行业而言,生产过程中物料传送转移设备的自动化生产水平的高低直接决定了它的生产效率及成本。作为完成物料传递和转移过程的专用平台,AGV可以通过不同程序的设置来实现单车独立运行以及多车联动系统的实时控制管理功能。在实际生产过程中,AGV在上位计算机的指挥和监控下,能够依据相关的命令自动沿着既定的路线行驶至指定工位并平稳停车,完成预先设定的任务。一套完整的AGV控制系统包含了导航信息的获取和识别、车体速度的控制与运动调整、RFID精确定位以及实时与上位机无线通信等多种关键技术,是一个具有高度自动化的智能信息处理系统[15]。

图1 AGV组成示意图Fig.1 Schematic diagram of AGV composition
2013年底,工业与信息化部在其官方网站上发布了《工业与信息化部关于推进工业机器人产业发展的指导意见》,指明了智能装备的发展方向和市场前景:到2020年要形成较为完善的产业体系,使工业机器人行业及其企业的技术创新能力和国际竞争能力明显增强。部分省市还提出了“以空间换面积,以机器换人力”的装备发展战略规划[16]。受到产业政策的鼓舞,各行业对传统装备的升级换代充满了期待。正是因为看到了AGV的市场潜力,许多企业积极研发、生产出了各自的产品。2013年,在上海亚洲国际物流展和广州国际物流展上,众多AGV企业纷纷亮相,展出了不同特点的产品,如图2、图3所示。

图2 潍柴动力股份有限公司产品Fig.2 Products of Weichai power limited by share ltd

图3 激光导引叉车Fig.3 Laser guided fork lift truck
按产品发展模式,目前市场上的AGV产品主要分为三类:第一类,拥有国产自主技术的AGV产品;第二类,采用进口技术国内生产的AGV产品;第三类,简易的进口或自主技术的AGV产品。
按生产企业的性质,国内的AGV企业分为三类:第一类,是以国营资本为主的企业,也是国产自主技术AGV的倡导者,在市场上占有主导地位。这类公司容易获得国家政策和财政的支持,企业资本相对雄厚,在企业荣誉和社会责任的驱使下,能够长期对AGV的技术研发进行投入,谋求长期的经济效益和社会效益,是我国AGV产业发展的基础。企业以产品满足用户的实际应用为目标,以技术和品牌来赢得用户。第二类,是以民营资本为主的企业,占AGV产业中的多数,一般企业规模不大,但市场意识强,技术上追求简易、实用,产品价格具有极强的竞争力。该类企业生产的产品被称为AGC或简易的AGV,其技术门槛相对较低,对AGV不做运行姿态的要求,可广泛用于“单一路径、固定流程”的应用环境,在汽车制造业已经有了大规模的应用。第三类是国外企业在中国的公司或代理商,其产品价格相对较高,销售方式主要是与物流系统集成商配套。
2 导航方式对比
具体导航方式分为固定路径导引和自由路径导引两大类,其工作原理和优缺点如表1所示。
3 应用实例
如图4所示,在AGV自动沿预定路径行驶过程中,激光导引定位系统能够完成对车体的实时定位与导航的任务,安装在车体上的激光定位扫描仪一边不间断地向四周发射激光束,一边接收由工作区域内预先放置的具有高反光性能的反射胶贴反射回来的激光束,通过发射与接收到激光束的时间间隔来推导出AGV车体在该时刻的实时位置以及车头的运动方向,系统将当前位置和运动方向与内置的数字地图进行对比来判断并校正行驶方位,实现对AGV运动过程的实时定位与导航功能。在将AGV装备到自动化的流水生产系统之前,需要把车间的工作环境及地图存入到控制系统中,尤其是生产线整体尺寸、车体坐标原点的设定、预定轨道的曲线特点以及路径周边各个反射板的编号及对应位置,使车载计算机控制系统能够依据这些场景构建出一个完整的数字地图,以便在生产流水线工作中与实时采集到的位置信息进行对比[17]。

图4 激光导引AGV工作示意图Fig.4 Schematic diagram of laser guided AGV
激光导引AGV的运行示意图如图5所示。根据激光的准直性和不发散性可知,它在传播过程中具有很强的抗干扰能力。激光扫描仪能够较完整地接收到经过反光板反射的激光信号,通过与发射的激光信号进行比对处理,就能够达到精确定位的目的。为了减少反射次数,避免干扰,激光扫描仪一般安装在AGV的顶部,不断地进行360°旋转,旋转周期在数十毫秒左右,同时发出经过调制的激光束。对发射出的激光束与接收到的激光束进行调质解调处理,就能够得到车体的位置信息。

表1 AGV导引方式对比Table 1 Comparison of AGV guided modes
由于激光的准直性以及不发散性,在工业生产中被广泛地用于测距定位系统。它通过发射一条激光束,再接收到从物体反射回来的信号,根据两者的时间差,来计算获得两者之间的距离。同时根据激光束发射与接收过程偏转的角度来确定被测物体与激光发射器之间的相对角度,从而获得物体的绝对位置信息。三角反射测量法需要形成两个相对独立的坐标系,即绝对的世界坐标系和相对机身保持不变的相对坐标系。绝对坐标系以车间厂房为参考,包含了所有经过初始化的激光反光板的位置信息,作为AGV在运行过程中的位置参考。而相对坐标系固定在AGV车体上,随着车体的移动而移动,保持与AGV的相对位置不变[18-20]。
在激光扫描器导航工作的过程中,需要计算出AGV在绝对坐标系中的当前位置信息(x,y)。由车载的NAV激光扫描器不断地扫描周边反光板的位置信息,得到激光扫描器到周围各个固定的反光板间的距离,通过计算来确定AGV载运行过程中的实时坐标。其计算原理如图6所示,设A、B、C三点固定处有位置已知的激光反射板,它们到NAV激光扫描仪的距离分别为lPA、lPB、lPC,由它们在坐标系中的数学关系可得以下关系:
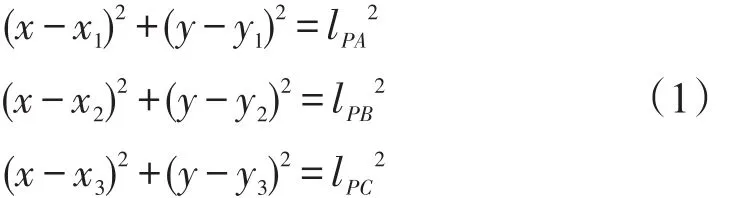
从式(1)计算可知,当激光扫描器知道了周边每一个反光板的准确坐标信息时,就可以精确地计算出AGV的当前位置坐标,得到位置信息。AGV在实际工作的过程中,激光扫描系统能够通过连续的计算,可以得到AGV在预定轨迹上行驶的位置信息和行驶状态。
AGV控制系统主要由主控电路、光电导引电路、多功能电路、驱动电路、超声波避障、按键组、报警装置等几部分构成。多功能电路主要用于各I/O信号的调理;光电导引电路主要用于色带导引信号的采集;驱动电路用于实现电机的功率驱动;主控电路主要由DSP芯片和CPLD芯片组成,完成对各种信号的处理,并与手控器进行通信。
AGV控制系统的组成包括:主控板、驱动板、多功能板、导引电路、显示电路和控制系统软件。主控板是控制系统的核心,采用DSP作为控制器,用于实现AGV车电机驱动控制、路径选择,安全避障等功能;驱动板控制电机的运转、减速和停止;导引电路是路径检测模块,把采集的光电信号处理后送给控制器,为其路径的决策提供参考。其控制系统组成如图7所示。

图6 导航坐标系Fig.6 Navigation coordinate system

图7 AGV控制系统组成框图Fig.7 Block diagram of AGV control system
在AGV进入自主导航工作状态前,首先应确定车体自身所在的位置,并对车体坐标系进行初始化操作,即通过扫描器确定周边每一个激光反光板的坐标信息,来矫正相对坐标系的原点。其初始化过程流程如下:
1)将AGV小车移动到绝对坐标系的零点位置后停车,在保持静止的状态下,开启激光扫描器,使激光扫描器能够扫描到三块以上的激光反射板。
2)根据激光反光板与激光扫描器之间的角度和距离信息,通过计算获得激光反光板的坐标位置,这些反光板的坐标信息构成离线地图中绝对坐标系的坐标参考点。
3)根据计算得到的各个参考点的坐标位置,激光导引系统生成工作场地地图。
4 意义及发展方向
从2013年的市场情况来看,AGV在中国的应用领域越来越广,分布在烟草行业、汽车制造行业、电子加工行业以及纺织行业等。物流操作涉及各行各业,AGV是物流装备中自动化水平最高的产品,拥有巨大的市场空间。呈现出了良好的发展前景。据物流专业媒体统计,2013年物流系统及装备的市场总额是360亿元,其中包括AGV在内的智能搬运类装备的占比为6.86%,也就是24.7亿元。和关节型工业机器人不一样的是,AGV并没有在汽车等制造业大规模的使用,受成本、应用技术等因素影响,除了烟草、汽车制造等领域,AGV应用推广并不顺利,市场规模相对偏小。从需求行业来看,汽车制造业对AGV的需求仍然保持了旺盛态势,在电力行业,AGV作为物流仓储的配套设备,呈现了上升趋势;医药行业由于GMP认证的推动,包括AGV在内的物流设备需求有明显提高。
AGV在系统技术上,串联、并联和混联系统都有了切实的应用,AGV已经从原来单一的自动搬运,发展成为了生产中必不可少的工艺装备,应用模式多种多样:用于重卡桥装的AGV,实现了不同型号产品的装配工艺位置变化;用于化工行业的AGV,实现了不同配方的自动配料工艺流程;用于机械加工行业的AGV,实现了工料在不同工序间复杂的转运流程。在单机技术上,AGV的导引形式多种多样,混合导引的方式得到了成功应用;驱动形式不拘泥于电动,成功实现了液压伺服驱动,用于重工行业的AGV,单车承载能力超过了20t;供电方式多样化,CPS无接触能量传输,自动换电池,车载充电机等方式都有了成功的应用。由上述分析可知,AGV主要的发展趋势如下:
1)AGV的技术水平将日益提高。现代AGV技术的最显著特征是具有智能化。车载计算机的硬软件技术日益强大,使AGV具有从网络、无线或红外线信号接受装置接收调度中心或客户指令,自动导引,自动行驶,优化路线,自动作业,运行管理,车辆调度,安全避碰,自动充电,自动诊断等功能,实现了AGV的智能化、信息化、数字化、网络化、柔性化、敏捷化、节能化、绿色化。现代AGV是24h不知疲倦的聪明车辆(仅在任务间隙时随机进行短时充电),能主动、自序、有节拍按最安全、快捷的路线执行作业。
2)AGV的动力性能将更趋强劲。AGV设计的难点之一是其动力源装置的设计。动力源的功率大小直接影响AGV的功用,而动力源的体积大小直接影响整车的体积及外观造型。传统的AGV采用铅酸电池,能量密度小,体积大。随着电池技术的发展,今年来电池逐步由高能酸性电池发展到开始采用高能碱性电池,以提高环保性能,大幅提高充放电比,目前由充电时间/放电时间比为1∶1提高到现在的1∶12,大幅缩短了AGV的待机充电的时间。动力电池性能及充放电技术的进步,使得现代AGV的动力性能普遍提高,运载能力与行驶特性进一步优化。
3)AGV的综合技术将逐步机器人化。AGV本身就是一种移动机器人,是一个集环境感知、动态决策与规划、行为控制与执行等多功能于一体的综合系统。它集中了传感器技术、机械工程、电子工程、计算机工程、自动化控制工程以及人工智能等多学科的研究成果,代表机电一体化的最高成就,是目前科学技术发展最活跃的领域之一。AGV的机器人化一直是AGV研究的热点技术。实际上,在机器人发展的整个过程中,其相关技术都先后在AGV中得到了应用。如智能移动机器人技术涉及的机器人导航与定位,路径规划、运动控制等,均在AGV中得到了体现。使得现代AGV无论是专项技术还是综合性能,均得到了普遍提高,并仍将继续提高。由于AGV的机器人化,现代AGV已不仅仅是一种沿固定路径行驶的搬运工具,几乎可以适合于各种固定的或不固定的运输场所。
5 结论
随着工业4.0概念的逐步成熟,AGV应用也得到了迅速的发展。同时,由于现代化生产观念日益受到重视,对生产线运行、物流系统的柔性要求越来越高。所以在产品转型升级、多种产品混合生产线运行以及重新组合生产线等方面,AGV必将得到迅速发展和普及应用,这不仅是现代化工业迅速发展的需要,更主要是由AGV本身所独具的优越性决定的。在“十三五”计划期间,国家大力强调工业4.0以及一路带一路的发展模式,在这样的大环境下,AGV的生产制造企业迎来了春天。目前,AGV在我国烟草、印钞、汽车、造纸等行业已有大规模应用,呈日益上升的势头,并出现了一些新的技术和行业应用趋势。尽管现在成熟的案例多是AGV在室内的应用情况,但随着需求的发展,户外或半户外AGV技术将逐步完善并进入应用阶段。它在工作中与户外机器人作业相辅相成,完成在相对恶劣的自然条件下的特殊任务生产作业内容。
[1] Siciliano B,Khatib O.Springer handbook of robotics [M].New York∶Springer,2008.
[2]Cao Y U,Fukunaga A S,Kahng A B.Cooperative mobile robotics∶antecedents and directions[J].Autonomous Robots,1997,4(1)∶7-27.
[3]王田苗,陶永,陈阳.服务机器人技术研究现状与发展趋势[J].中国科学∶信息科学,2012,42(9)∶1049-1066. WANG Tian-miao,TAO Yong,CHEN Yang.Research status and development trends of the service robotic technology[J].Scientia Sinica Informations,2012,42(9)∶1049-1066.
[4]王迎春,沈应龙.美国服务机器人产业创新—来自iRobot的经验与启示[J].全球科技经济瞭望,2014,29(4)∶61-66. WANG Ying-chun,SHEN Ying-long.US service robot industry innovation-experience and lessons from iRobot's[J].Global Technology Economic Outlook,2014,29 (4)∶61-66.
[5]宋章军.服务机器人的研究现状与发展趋势[J].集成技术,2012,1(3)∶1-9. SONG Zhang-jun.Current situation and development trend of service robot[J].Integration Technology,2012, 1(3)∶1-9.
[6] Computing Community Consortium.A roadmap for US robotics∶from internet to robotics[C].Computing Community Consortium∶The United States of America,2009.
[7] Meng Q,Lee M H.Design issues for assistive robotics for the elderly[J].Advanced Engineering Informatics,2006,20(2)∶171-186.
[8] International federation of robotics,world robotics 2011 service robots[EB/OL].http∶//www.ifr.org/service-robots/statistics/.
[9] Marconi L,Basile F,Caprari G,et al.Aerial service robotics∶the AIRobots rerspective[C].International Conference on Applied Robotics for the Power Industry(CARPI),2012∶64-69.
[10]Honda.Honda unveils all-new ASIMO with significant advancements[EB/OL].http∶//world.honda.com/news/ 2011/c111108All-new-ASIMO/index.html.
[11] Intuitive Surgical.The da vinci surgical system[EB/ OL].http∶//www.intuitivesurgical.com/products/davincisurgical system/.
[12]Li Y B,Li B,Ruan J H,et al.Research of mammal bionic quadruped robots∶a review[C].Proceedings of the IEEE Conference on Robotics,Automation and Mechatronics(RAM),Qingdao,2011∶166-171.
[13]Zhao LY,Li R F,Zang T Y,et al.A method of landmark visual tracking for mobile robot[C].The 2008 International Conference on Intelligent Robotics and Applications.2008∶901-910.
[14]于清晓.轮式餐厅服务机器人移动定位技术研究[D].上海交通大学,2013. YU Qing-xiao.Research on mobile localization techniques for wheeled restaurant service robots[D].Shanghai Jiao Tong University,2013.
[15] Haverinen J,Kemppainen A.Global indoor self-localization based on the ambient magnetic field[J].Robotics andAutonomous Systems,2009,57(10)∶1028-1035.
[16]韩金华,王立权,孟庆鑫.护理助手机器人磁导航方法研究[J].仪器仪表学报,2009,30(4)∶834-839. HAN Jin-hua,WANG Li-quan,MENG Qing-xin.Study on magnetic navigation for nurse assistant robot[J].Chinese Journal of Scientific Instrument,2009,30(4)∶834-839.
[17] Storms W,Shockley J,Raquet J.Magnetic field navigation in an indoor environment[C].Ubiquitous Positioning Indoor Navigation and Location Based Service (UPINLBS).IEEE,2010∶1-10.
[18]Angermann M,Frassl M,Doniec M,et al.Characterization of the indoor magnetic field for applications in localization and mapping[C].Indoor Positioning and Indoor Navigation,2012.
[19]Grand E L,Thrun S.3-axis magnetic field mapping and fusion for indoor localization[C].Multisensor Fusion and Integration for Intelligent Systems(MFI).IEEE,2012∶358-364.
[20]汪剑鸣,王曦,王胜蓓,等.室内惯性/视觉组合导航地面图像分割算法[J].中国惯性技术学报,2011,19(5)∶553-558. WANG Jian-ming,WANG Xi,WANG Sheng-bei,et al. Floor segmentation algorithm for indoor vision/inertial integrated navigation[J].Journal of Chinese Inertial Technology,2011,19(5)∶553-558.
[21]王聪,孙炜,卜德旭,等.基于惯性导航与立体视觉的风管清扫机器人同时定位与地图创建方法[J].机械工程学报,2013,49(23)∶59-67. WANG Cong,SUN Wei,BU De-xu,et al.Simultaneous localization and mapping research for sir-duct cleaning robot based on inertial navigation and stereo vision[J]. Journal of Mechanical Engineering,2013,49(23)∶59-67.
TheApplication ofAutomated Guided Vehicle in Industry 4.0
SHANG Jun-yun,BAO Hai-ning,FENG Yan-li,HU Jing
(The 16thInstitute,ChinaAerospace Science and Technology Corporation,Xi’an 710100)
With 4.0 industry gradually mature of the concept of intelligent factory,intelligent manufacturing and logistics will be the developing mode of the future for a long time,the traditional manufacturing enterprises will face the intelligent upgrading and transformation.In this background,from the angle of enhance the automation of industrial production,introduced the automated guided vehicle(AGV)in production line.Then analyses the advantages and disadvantages of each kind of navigation way,combining the characteristics of the modern mode of production,from the principle of focusing on the situation of the laser seeker,follow-up for the enterprise in the choice of suitable automated guided vehicle provides reference.
industrial 4.0;industrial automation;automated guided vehicle(AGV);direct way;laser navigation
TP242.6
A
1674-5558(2016)07-01252
10.3969/j.issn.1674-5558.2016.02.001
2016-01-14
2012年战略性新兴产业高端装备专项(发改办产业[2012]432号)
尚俊云,男,硕士,研究方向为工业自动化及工业机器人。
