基于神经网络的多尺度多参数硅微陀螺仪研究*
2016-09-19黄清华
徐 韩,曾 超,黄清华
(1.南京理工大学电子工程与光电技术学院,南京210094;2.中国工程物理研究院电子工程研究所,四川绵阳621900)
基于神经网络的多尺度多参数硅微陀螺仪研究*
徐韩1,2,曾超2*,黄清华2
(1.南京理工大学电子工程与光电技术学院,南京210094;2.中国工程物理研究院电子工程研究所,四川绵阳621900)
由于硅微陀螺仪工艺加工导致漂移误差进而影响INS测量精度,所以硅微陀螺仪的漂移估计成为研究的重点。硅微陀螺仪精度受多种因素的影响,因此很难对非平稳非线性输出硅微陀建立准确的误差模型。提出一种的基于小波神经网络的多尺度和多参数非线性估计改进硅微陀螺仪的漂移估计。实验结果表明,在通过本文介绍基于神经网络的多尺度多参数校准后硅微陀螺仪精度从1°/s到0.05°/s。
偏移估计;MEMS陀螺仪;神经网络;小波分析
Predecessors have done a lot of research work with Gyro drift prediction,Wavelet neural network for fiber optic gyroscope drift forecasting was proposed by Rashad S in 2004,using the gyro output value after wavelet analysis as the target value of neural networks for drift forecast[1-2].However,this method is that the gyro output trained by neural network approaching to wavelet de-noising result,equivalent to remove highfrequency noise,the result is not likely to convergence because of less input information of neural network[3-5].
Neural network can identify nonlinear system effectively,but accuracy of parameters identification was interfered greatly by noise[6-7].In this paper,an improved wavelet neural network was proposed,which eliminating high frequency noise of silicon MEMS gyroscope output,and combined with the advantages of neural networks in nonlinear system identification.The results showed that,the precision of gyroscope has been increased from 1°/s up to 0.02°/s by improved method[8-10].
1 Error analysis of silicon MEMS gyroscope
The current manufacturing process cause low pre-cision of Silicon MEMS gyroscope.Silicon MEMS gyroscope error includes three:machining error,detection circuit error and environment error.In this paper,error characteristics of silicon MEMS gyroscope analyzed with Time and Frequency domain[11].
2 Frequency domain analysis of silicon MEMS gyroscope output
Allan variance analysis is common method which can identify and quantify the noise term of each band was usually used in time domain for the frequency stability analysis[12].Rate gyroscope error can be expressed as angle random walk(ARW),angular rate random walk(RRW),flicker noise(bias stability BI),ramp rate(RR),the rate of quantization noise(QN),sinusoidal noise(SN)and Markov noise(MN),it’s expressed as follows:

At room temperature,MEMS gyroscopes can be sampled at the rate of 200 Hz with data collection of one hour,and seek Allan variance of 65 536 points. Double logarithmic curve of Allan standard deviation is shown in Table 1.
Gyro output signal from high to low frequencies presents RRW,QN and ARW noise error,Zero drift stability of gyro entire frequency band about 0.02°/s,it’s hampered accuracy of gyro seriously,because of the high-band noise is very large.
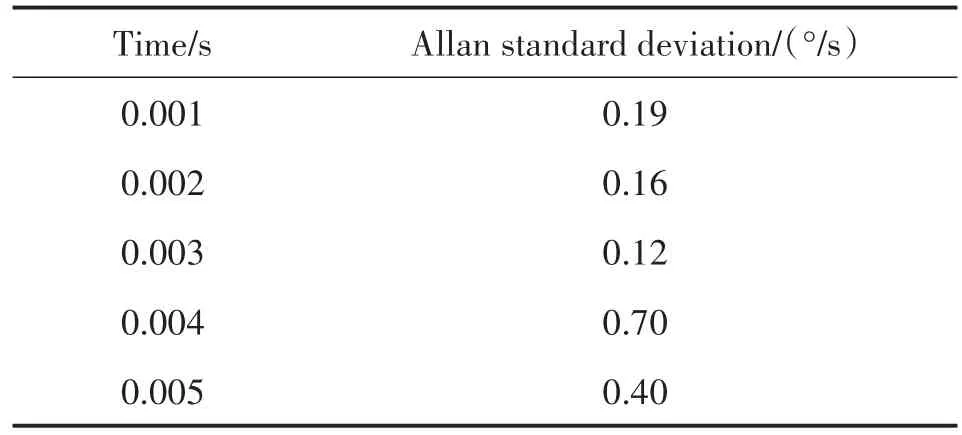
Table 1 Allan STD of gyro
3 Time domain analysis of silicon MEMS gyroscope output
After detrended items,periodic term and steady process,the silicon MEMS gyroscope output was analyzed by the self-correlation and cross-correlation as shown in Fig.1(a),(b)respectively.The results show that data of t maximum correlate with data of t-1 and t-2.It’s established AR2 model(Equation(2))to decorrelation.Fig.1(c)is the original data.Fig.1(d)is the de-correlation data,gyroscope bias stability increased from 0.294 0°/s to 0.201 5°/s.
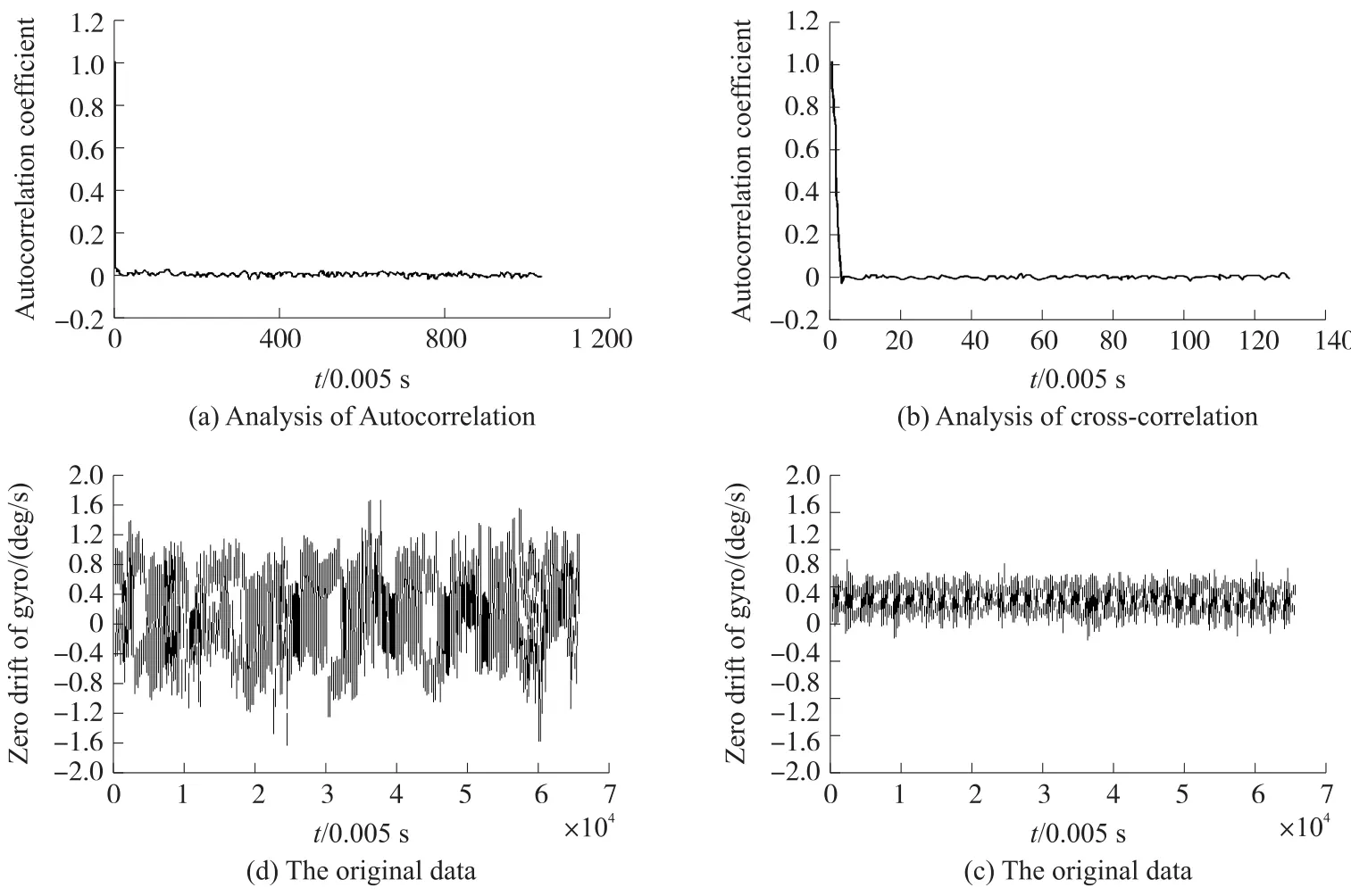
Fig.1 Time series analysis of gyro

Wherex(t-k)-gyro output,φk-model parameters,ε(t)-white noise.
It’s known that silicon MEMS gyroscope output data is a non-stationary process after the frequency domain analysis,we found that the gyro output,which mixed a lot of high-frequency noise and singular datapoints.In addition,various error factors of gyroscope will be changed by its own motion,the environment and temporal variation.Multi-scale multi-parameter drift forecasting is proposed for non-stationary nonlinear characteristics of silicon MEMS gyroscope output.
4 Gyro drift forecasting of Multiscale Multi-parameter
Multi-scale multi-parameter approach gyro drift forecasting includes the following two steps were shown in Fig.2.①Wavelet multi-scale smoothing.③Multiparameter nonlinear neural network prediction.
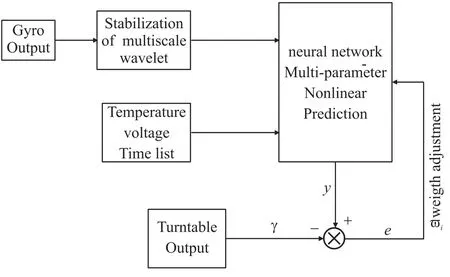
Fig.2 Method of multi-scale and multi-parameter predict drift of gyro
4.1Wavelet multi-scale smoothing
Advantages of wavelet multi-scale analysis are good characteristic of time and frequency domain localization and capabilities of multi-resolution analysis,it’s a good resolution for low-frequency signals in the frequency domain and high-frequency signal in time domain,can extract the steady state value of signal effectively.Gyro output base on wavelet multi-scale smoothing includes high frequency noise and low frequency valid-signal,the wavelet coefficients of signal is larger,and the wavelet coefficients of noise is small,it’s possible to remove of high frequency noise by comparing waveletcoefficientsafterthedecompositionwith threshold value.The process is shown in fig 3:
4.2Decomposition
The collected gyroscope data is represented by the highest resolution scale space.

The highest resolution scale space will be decomposed to the low frequency partand high frequency partby Mallat algorithm,until the resolution

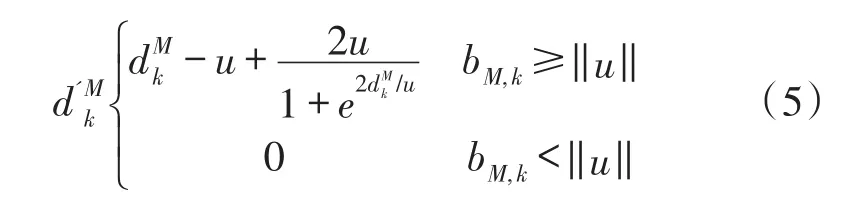
4.3Threshold
Gyro outputg(x)is decomposed by the wavelet,the true gyroscope’s output focused on low frequency,whereas the energy of noise is widely distributed throughout the wavelet domain,which caused high-frequency noisesmall.De-noisedis shown as follow.
4.4Reconstruction
Gyro output steady valueg′(x)is computed by Mallat algorithm with inverse wavelet transform,where-high frequency coefficient,-low frequency coefficient.

It’s known that orthogonal wavelets daub4 can ensure maximum energy of gyro signal.In Fig.3,handh˜-low pass filter,gandg˜-high pass filter,↓2-Downsample,↑2-upsampling.
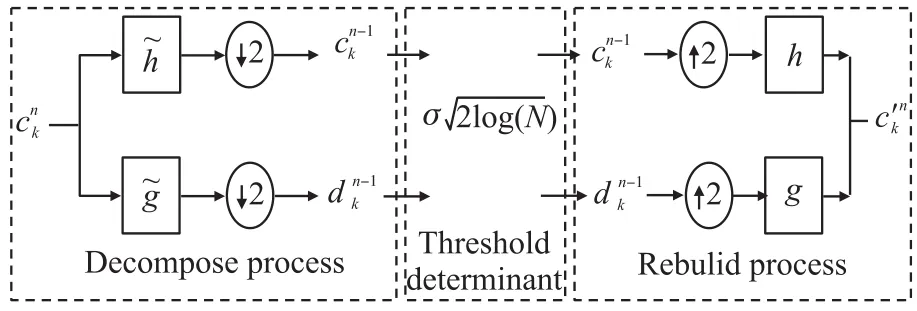
Fig 3 Sketch of decomposing and construction using wavelet
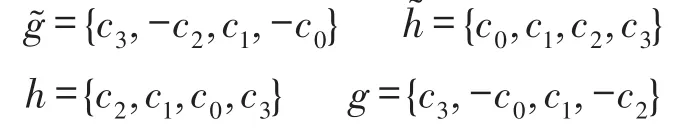
Wherec0,c1,c2,c3are,respectively.
5 Multi-parameter nonlinear neural network prediction
Error factor of silicon MEMS gyroscope is very complex,which vary with the external environment and time.It’s difficult to establish nonlinear output errorfactors model accurately because of the gyro drift.Neural networks has a great advantage with the drift prediction of silicon MEMS gyroscope,three-layer neural network can approximate any nonlinear function,and remember the training result of pre large sample by the hidden layer neurons.In this paper,radial basis neural network was proposed to predict drift because of the high training speed and the fast convergence rate.The drift forecasting of RBF neural network is shown in Fig.4,xg-de-noised gyroscope measurement,xe-temperature,xp-power,X=[X1,X2,…Xk,…Xn]Tis training sample,where either of the training sample is Xk=[xgk,xek,xpk,x(t-1)k,x(t-2)k]T.The estimated output of neural networkykwas proposed as follow:

m-the hidden layer nodes,ωi-the weighted value of connection of i-th hidden node and output,φ(Xk,ti)-the base function of hidden layer nodes,tiandσiis center and width of hidden layer node basis functions respectively.

Gyro drift forecasting process is sample learning,which determine the parametersti,σi,ωito make the estimated valueykapproximate the expected value. Minimum estimated value of weightsωiis proposed as follow:


Fig.4 Sketch of RBF neural network
6 Experiment
Multi-scale multi-parameter gyro drift forecasting is used for drift prediction and compensation with Crs03 silicon MEMS gyroscope,which is produce by Silicon Design Company.During the test,gyroscope output,gyroscope temperature,supply voltage using 200 Hz rate for the collection,the collected signals is de-noised by three-layer wavelet decomposition daub4,gyro output with delayed 1-2 sample time as time series of neural network training input(xt-1,xt-1),which were trained by RBF neural network,Results of calibration drift forecasting is shown in Table 2.

Table 2 Result of calibration
As we can seen from Table 2,the original signal accuracy of gyroscope is about 1°/s,the accuracy of gyro is increased to 0.5°/s after three-layer wavelet decomposition,and accuracy of gyro is increased to 0.05°/s by the multi-scale multi-parameter method. Multi-scale multi-parameter has a great advantage in silicon MEMS gyro drift forecasting.
7 Summary
Silicon MEMS gyroscope output is a non-linear non-stationary process.It is difficult to establish error model accurately,because of various error factors such as the environment and time.In order to improve the method,multi-scale multi-parameter was proposed for silicon MEMS gyroscope drift prediction and calibration.The results show that silicon MEMS gyroscope accuracy increased from 1°/s to 0.05°/s.
References
[1]Hammon R L.An Application of Random Process Theory to Gyro Drift Analysis[J].IRE Transactions on Aeronautical and Navigational Electronics,1960,3(2):84-91.
[2]Fu J G,Wang X T,LI B.Data Analysis and Modeling Re-Search of MEMS Gyroscope Drift[J].Journal of Transducer Technology,2005,24(3):75-77.
[3]Algrain M C,Ehlers D E.Novel Kalman Filtering Method for the Suppression of Gyroscope Noise Effects in Pointing and Tracking System[J].Journal of Optical Engineering,1995,34(10):3016-3030.
[4]Naser E S,Nourel Din A.Wavelet De-Noising for IMU Alignment [J].IEEEA&E System Magazine,2004,19(10):32-39.
[5]Xu F,Ma G F.Investigation on Filter Method of FOG Drift Data Based on Arima Model[J].Transducer and Micro System Technol-ogies.2007,26(2):31-36.
[6]Wang H,Wang J P.Application of Gradient Radial Basis Function Net Working the Modeling of MEMS Gyros’Random Drift [J].Journal of Chinese Inertial Technology,2006,14(4):44-48.
[7]Zhou Z J,Hu C H.An Effective Hybrid Approach Based on Grey and Arma for Forecasting Gyro Drift[J].Chaos Solitons and Fractals,2008,35(3):525-529.
[8]Xia G S,Yu R Q,Cheng Q Q.Develop for Full Automatic Gyroscope Based on Inertial/Geomagnetic[J].Chinese Journal of Sensors and Actuators,2013,26(7):966-970.
[9]Nassar S,Niu X,El-Sheimy N.Land-Vehicle INS/GPS Accurate Positioning During GPS Signal Blockage Periods[J].Journal of Surveying Engineering,2007,133(3):134-143.
[10]Shen F,He R.Kalman Filter Based High Dynamic GPS Carrier Tracking Loop[J].Journal of Astronautics,2012,33(8):1041-1047.
[11]Zhu Y L,Yang D K,Liu C K.Filtering Algorithm Used for High Dynamic GPS Frequency Estimation[J].Journal of Beijing University of Aeronautics Astronautics,2009,35(10):23-27.
[12]Knight D T.Rapid Development of Tightly Coupled GPS/INS Systems[J].IEEE Aerospace and Electronic System,1999,12(2):14-18.

徐韩(1984-),男,汉族,四川人,南京理工大学博士研究生,主要研究方向为组合导航、MEMS器件,kingkaiser@163.com;

曾超(1968-)男,汉族,中国工程物理研究院研究员博士生导师,主要从事武器电子学系统科学,常规武器引信等领域,carlzeng@139.com。
A Novel Method of Neural Network Based on Multi-Scale Multi-Parameter for Silicon MEMS Gyroscope*
XU Han1,2,ZENG Chao2*,HUANG Qinghua2
(1.School of Electronic and Optical Engineering,Nanjing University of Science and Technology,Nanjing 210094,China;2.Institute of Electronic Engineering,China Academy of Engineering Physics,Mianyang Sichuan 621900,China)
The silicon MEMS-Gyro’s drift affect precision of INS because of machining technology.So estimated the drift of silicon MEMS-Gyro became the focus of research.It was difficult to build the error model of silicon MEMS-Gyro accurately,Because of the precision of silicon MEMS-Gyro was affected by a lot of factors,and arming at the output of non-stationary nonlinear characteristics.In the thesis,stationary multi-scale and multi-parameter nonlinear estimated the drift of silicon MEMS-Gyro was proposed base on the improved wavelet neural network method.The experimental results show that the precision of the MEMS-Gyro has been improved from 1°/s to 0.05°/s by the method of multi-scale and multi-parameter.
estimate drift;MEMS-gyro;RBF neural network;wavelet
TP212.9
A
1004-1699(2016)08-1160-05
EEACC:763010.3969/j.issn.1004-1699.2016.08.006
项目来源:国防预先研究项目(编号涉密)
2016-01-11修改日期:2016-01-15
