基于SeeSV噪声定位技术的电机噪声测试
2016-09-19余慧杰
余慧杰,徐 强
(上海理工大学 机械工程学院,上海 200093)
基于SeeSV噪声定位技术的电机噪声测试
余慧杰,徐强
(上海理工大学 机械工程学院,上海 200093)
针对驱动电机某一运转工况的噪声声压级与电机噪声频率的测试问题,提出了一种运用声学照相机SeeSV与传声器相结合,并同时检测电机振动信号的测试方法。通过选取SeeSV的不同频段对噪声源进行定位识别,分离出驱动电机的噪声频段,运用传声器测定电机的噪声强度,并用振动信号对声压信号进行验证。测试结果表明,用SeeSV和传声器相结合的方法,可在复杂噪声中识别出驱动电机的噪声频率为2 666.25 Hz,声压级为60.7 dB,对工程噪声的评价具有实践意义。
驱动电机;噪声测试;噪声分离;声源定位
驱动电机作为电动汽车的主要动力输出源,其噪声的大小将对整车乘坐舒适性起到至关重要的影响,它不仅影响着乘员的健康,同样也是车外环境噪声污染的一个重要来源。电机的噪声是由不同频率、不同声强的噪声叠加而成,可高达110 dB[1]。因此,有效控制电机噪声已成为驱动电机制造商的重要工作,而准确的在各种混杂噪声中定位、分离电机的噪声则是控制噪声的基础。
针对电机噪声测试的方法及噪声频率的分离问题,国内外学者及技术人员展开了大量的研究工作。文献[2]通过阶次分析方法找到电机在负载和空载工况下噪声的特征阶次,从而确定电机的主要噪声源;文献[3]利用FFT频谱分析法对电机的振动噪声信号进行频谱分析,进而对电机噪声进行有效的识别;文献[4]使用传声器阵列试验以及频谱分析找到了噪声的激励源。
本文以某新能源汽车驱动电机为研究对象,基于噪声定位原理,运用声学照相机SeeSV对电机噪声定位,获取电机噪声频段,通过高灵敏度的传声器进一步获得电机噪声的频率值及声压级,并用同时检测电机振动信号的办法对试验进行验证,为降低电机噪声提供了理论依据。
1 噪声定位原理
在噪声的可视化定位原理中,有很多种算法可供选择,一般可分为3类[5-6]:基于高分辨率谱估计的方法、基于波达时延差(Time Difference of Arrival)的方法和基于波束成形的方法。其中,基于波束成形方法作为一种重要的信号处理技术,具有较高的信号增益、灵活的波束抑制、较强的抗干扰能力与较高的空间分辨能力等特点,因此,受到广泛关注及应用。
波束成形[7-8]方法基于传声器阵列,根据各传声器接收声波信号的声程差不同而产生的相位差来确定信号的来源方向。以空间离散分布的多基元基阵为例对传声器阵列的指向性原理进行阐述。
如图1所示,设有空间任意分布的N个无指向性传感器,图中Hi表示第i个传声器,在直角坐标系下的坐标为(xi,yi,zi),球坐标系下的坐标为(θi,φi,γi)。
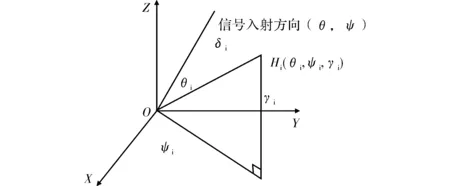
图1 指向性原理示意图
在分析阵列指向性时,计算各传声器之间的声程差是关键,基于以上坐标有
(1)
以坐标O为参考坐标原点,由图1可知空间的任意传声器Hi到参考点的声程差为
di=ricosθi
xisinθicosφ+yisinθsinφ+zicosθ
(2)
其相位表达式为
(3)
当基阵指向(θ0,φ0)时,Hi的补偿相位为
(4)
令Δεi=ε′-ε″。对于有N个基元的指向性函数[9]为
(7)
其指数形式为
(8)
根据指向性函数即可定位噪声在空间中的位置。SeeSV传声器阵列是基于波束成形技术,利用指向性函数开发的新型声学照相机。
2 SeeSV声学照相机
SeeSV声学照相机整体集成了30个传声器,以轮胎形排列于传声器的骨架上[10],具有指向性好、声源识别能力强、旁瓣水平低的特点。SeeSV声学照相机是基于高速波速成形技术开发的实时声学照相机,其测试频率范围为350 Hz~12 kHz,可用于瞬态噪声源的检测,也可用于稳态噪声源的精确定位。
在试验测试中,SeeSV声学照相机主要用于噪声源的定位,其工作原理为:通过波束成形选取适当的加权向量,通过对传声器阵列中各阵元的输出进行延时、加权、求和等运算,从而使某一期望方向上的信号到达阵列后均是同向的,进而在该方向上产生一个空间响应极大值。当SeeSV各阵元接收的信号都是同向时,阵列可产生一个增强的信号输出,否则输出将被减弱。因此,通过SeeSV可实现声源定位,实现声场的可视化测量,直观定位声源位置。
3 试验测试
3.1电机噪声测试
本次试验测试以某乘用车驱动电机为测试对象,采用SeeSV与传声器相结合的办法测试电机噪声频率值与电机噪声声压级。
在试验测试中,SeeSV用于区分不同频段噪声的来源。通过调整频段范围,使云图红色区域覆盖被测电机,此时的SeeSV频段即为电机噪声的频段。在获得电机噪声频段范围时,采取同时检测传声器的办法,滤波后去除频段范围之外的噪声干扰。此时,波峰处的频率值为电机噪声的精确频率值,幅值为电机噪声的声压级。若该频率与扫频时频图的频率相差大,则需在SeeSV滤波频段范围内调整滤波带宽,重新获取精确的电机声压级与电机噪声频率点,技术路线如图2所示。
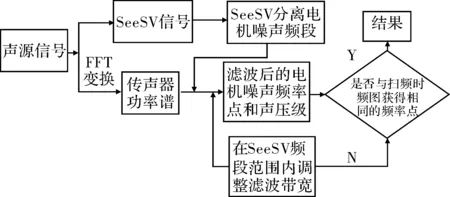
图2 噪声测试技术路线图
3.2测试结果分析
在电机转速为5 000 r·min-1,负载为70 N·m的测试工况中,通过截取不同的频段,SeeSV声学照相机可以给出直观的噪声场分布图,如图3和图4所示。图中颜色的深浅代表声压的强弱,黑色表示声压最强。

图3 2 875~3 150 Hz频段的噪声分布图

图4 2 550~2 850 Hz频段的噪声分布图
从图3可知,2 875~3 150 Hz频段的噪声主要由台架封盖与管路振动产生,从图4可知2550~2 850 Hz频段的噪声主要由被测电机产生,从而初步对噪声来源进行分离。
由于分辨率的限制,SeeSV相机只能初步给出被测电机噪声的范围和强度,难以给出精确的频率点和具体声压级。在SeeSV相机给出被测电机噪声频率范围的基础上,传声器同时检测声压信号,对被测电机的具体频率和声压级进行详细分析。
对传声器采集的信号在2 550~2 850 Hz频段滤波,并做FFT变换得到其幅度谱曲线如图5所示。

图5 2 550~2 850 Hz FFT变换曲线
从图5可看出,被测电机的噪声频率为2 666.25 Hz,声压级为60.7 dB。
3.3结果验证
为验证上述噪声测试方法的可靠性,试验采取同时检测贴在电机表面的加速度计信号的办法对其进行验证。如图6所示为贴在电机上部加速度计的时频图,扫频试验可以得到电机从0~8 000 r·min-1以每秒增加100 r·min-1的速率做连续变转速的时频图。①线为电机做连续变转速时,电机噪声频率随转速变化的曲线图。从图6可知,当电机转速为
5 000 r·min-1时,电机的噪声频率为2 650 Hz附近,如图5所示,这与通过SeeSV测量得到的电机频率点2 666.25 Hz相近。

图6 加速度计连续扫频时频图
4 结束语
SeeSV声学照相机基于波速成形技术对噪声进行分离,通过选取不同的噪声频段,能有效地识别特定频段内噪声的分布情况,为待测物噪声频率的确定提供参考依据。实验证明,该方法检测的电机噪声频率与贴在驱动电机上的加速度传感器检测到的电机振动频率相近,且该方法可实时直观地观察到不同频段噪声的来源,方法简单有效。为电机噪声分离提供依据,为电机噪声测试提供方法。
[1]程发斌,汤宝平,赵玲.声强法在电动机噪声测试中的应用[J].重庆大学学报:自然科学版,2005,27(11):11-14.
[2]吴小珊,施全,石晓辉,等.乘用车启动电机噪声评价方法[J].噪声与振动控制,2015,35(2):86-90.
[3]汪庆年,李红艳,史风娟,等.基于频谱分析的电机噪声源的识别[J].声学技术,2009, 28(4):528-531.
[4]施全,郭栋,石晓辉,等.基于麦克风阵列的变速器噪声源定位研究[J].振动与冲击,2012, 31(13):134-137.
[5]Brandstein M,Ward D. Microphone arrays: signal processing techniques and applications, chapter robust localization in reverberant rooms[M].US:Springer,2001.
[6]赵志伟.噪声目标被动定位方法研究[D].哈尔滨:哈尔滨工程大学,2008.
[7]刘洛斌,李舜酩,丁一,等.基于波束成形理论的传声器阵列声场仿真分析[J].机械设计与制造工程,2014,43(5):71-75.
[8]赵芳芳.波束形成方法在噪声源识别应用中的仿真和实验研究[D].上海:上海交通大学,2007.
[9]栾桂东,张金铎,王仁乾.压电换能器和换能器阵[M].北京:北京大学出版社,2005.
[10]褚志刚,杨洋,蒋忠翰.波束形成传声器阵列性能研究[J].传感技术学报,2011,24(5):665-670.
Motor Noise Test Based on SeeSV Acoustic Source Location
YU Huijie, XU Qiang
(School of Mechanical Engineering, University of Shanghai for Science and Technology, Shanghai 200093, China)
A test method combining the acoustic camera SeeSV with microphones to detect the motor vibration signal simultaneously is proposed for measuring a drive motor sound pressure level and noise frequency. Different SeeSV frequency bands are chosen to locate and identify the noise source, and isolate motor noise spectrum. Microphones are used to measure the motor noise intensity, which is verified by vibrating signal. The result shows that noise frequency and sound pressure level from drive-motors can be identified in complex noises by using the combination of SeeSV with sound transmission meter in practical engineer noise evaluation. The noise frequency and sound pressure level is 2666.25 Hz and 60.7 dB, respectively.
driving motor; noise test; noise separation; acoustic source localization
10.16180/j.cnki.issn1007-7820.2016.08.018
2015--11 10
余慧杰 (1978-),男,博士。研究方向:结构动力学分析及优化。徐强(1990-), 男,硕士研究生。 研究方向:振动与噪声。
TM301.4+3; TB52+ 1
A
1007-7820(2016)08-061-03
