桁架式桥梁检测车及其液压系统仿真分析与研究
2016-09-19邢红亮岳伟平
邢红亮,官 革,岳伟平
(长安大学工程机械学院,陕西西安710064)
桁架式桥梁检测车及其液压系统仿真分析与研究
邢红亮,官革,岳伟平
(长安大学工程机械学院,陕西西安710064)
以某种型号的桁架式桥梁检测车为研究对象,介绍了它的结构组成和工作原理,并对它的液压系统进行了分析。并利用Simulink对它的摆幅机构电液比例控制系统进行了仿真研究,结果表明,通过调节PID控制器的参数可以方便有效提高系统的性能;验证了通过正确的数学建模,并利用Simulink对系统进行仿真分析,可以预先了解系统特性,提高设计系统时的效率,为完善桁架式桥梁检测车的性能和相关领域的研究提供了重要参考。
桁架式桥梁检测车;液压系统;摆幅机构;Simulink
桥梁检测车采用机、电、液、信一体化技术,是一种可以为桥梁检测人员在桥梁检测和维修过程中提供作业平台的专用汽车,装备有桥梁检测仪器和工作平台[1]。根据上部工作装置形式的不同可以分为桁架式和折臂式两种,由于结构形式的不同,它们工作原理也不相同[2]。桁架式桥梁检测车采用工作稳定的通道式工作台,检测人员可以在平台上行走,与折臂式桥梁检测车相比,提升了工作平台的承载能力,增加了检测面积,检测效率比较高。本文首先介绍了某型号桁架式桥梁检测车的结构组成和工作原理,然后对它的液压系统进行了分析,并利MATLAB中的Simulink对摆幅机构的液压系统回路进行了仿真分析和研究。
1 结构组成和工作原理
桁架式桥梁检测车结构复杂,以某型号桁架式桥梁检测车为例,它主要由车辆底盘、桁架工作装置、液压动力系统、电控系统等组成。图1是桁架式桥梁检测车处于工作状态的结构示意图。
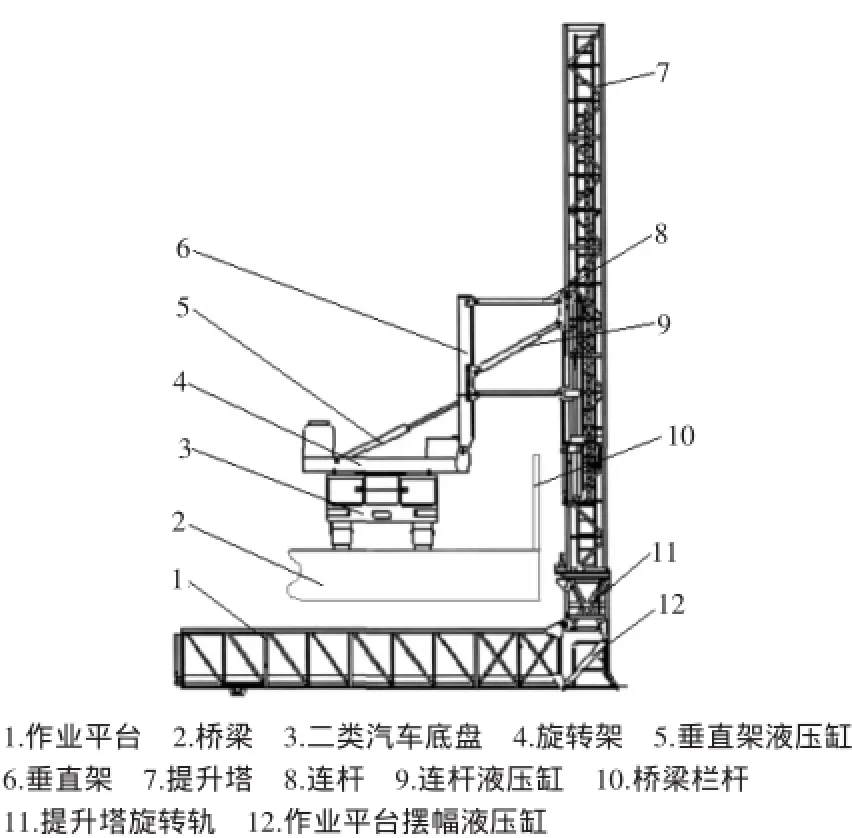
图1 桁架式桥梁检测车结构示意图
车辆底盘采用成熟的通用汽车底盘,根据整车的布置做一些适当的改动。桁架工作装置主要由举升机构、旋转机构、平行四边形机构、提升塔、摆幅机构、作业平台等构成。旋转机构包括底座的旋转架和提升塔下部的旋转轨,都采用液压马达、回转大齿轮、驱动小齿轮、回转支撑的组成形式,通过控制液压油进入液压马达的方向,实现回转运动的正反向运动;举升结构由垂直架、垂直架液压缸等组成,通过垂直架液压缸能够使桁架侧翻;平行四边形机构由连杆、连杆液压缸和安装在提升塔的支架组成,通过连杆液压缸可以跨越不同高度的桥梁护栏;提升塔上安装有提升液压缸,通过液压缸的伸缩可以实现伸缩臂的升降;作业平台由基本平台和伸缩平台构成,通过摆幅机构实现工作平台的展开,通过伸缩液压缸改变工作平台的水平工作幅度[3]。
桁架式桥梁检测车工作时,在液压缸和马达的驱动下,按照电控系统的指令依次实现旋转台回转90°,垂直架翻转90°,桁架垂直下降,工作平台的展开,工作平台旋转至桥底,工作平台的收缩[4]。
2 液压系统分析
液压系统是桁架式桥梁检测车的关键部分,直接影响工作装置的性能。以某型号的桥梁检测车为研究对象,分析研究桁架式桥梁检测车的工作装置液压系统,液压原理简图如图2所示。
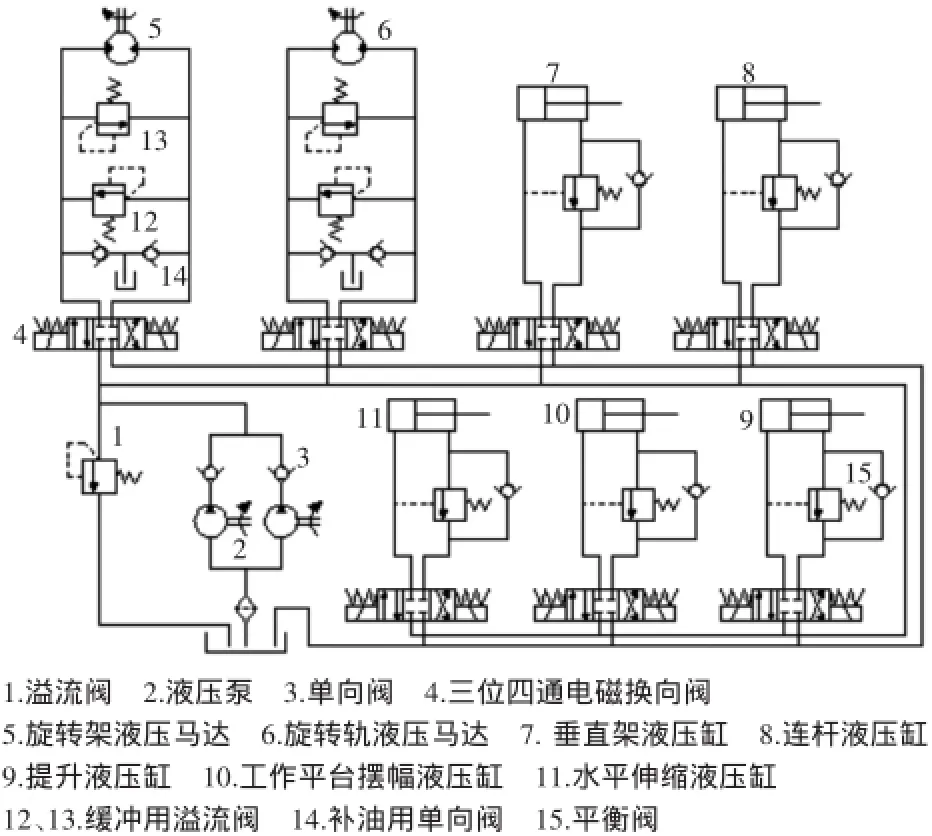
图2 桁架式桥梁检测车液压原理简图
桁架式桥梁检测车的旋转机构运动时,通过控制液压油进入液压马达的方向,实现回转的正反向运动。由于转动惯量很大,在启动、制动和反转时会产生很强的液压冲击。液压冲击会导致液压系统升温,使液压元件产生振动和噪音,甚至破坏,重则使管路破裂,严重降低系统安全稳定性。该桁架式桥梁检测车旋转机构采用了并联缓冲阀式缓冲回路,在高、低油路之间并联两个缓冲溢流阀,可吸收液压冲击。缓冲溢流阀的调定压力略大于泵出口处溢流阀的工作压力,两个单向阀起补油作用。当旋转机构启动、制动和反转时,高压腔的液压油经过缓冲溢流阀进入低压腔,减小了液压冲击。这种缓冲回路补油量少,背压低,工作效率高[5]。
举升机构、平行四边形机构、摆幅机构、提升塔等都是通过液压缸的收缩实现桁架的伸展和回缩。桥梁检测车的桁架质量很大,工作时必须保证液压缸伸缩的稳定可靠。从上述原理图中可看到,上述各工作机构的液压回路中都设置平衡阀,形成平衡回路,可以防止液压缸在负载作用下超速回缩以及由于重力而自由下落。另外,采用该平衡回路,当平衡阀与换向阀之间管路破裂时,液压缸不会突然回缩,有效地保证了桥梁检测车的安全可靠性[6]。
3 摆幅机构电液比例控制系统的建模与仿真
3.1摆幅机构电液比例控制系统的数学建模
将电压U作为输入,液压缸活塞Y作为输出,根据相关文献资料可推导出电液比例阀控缸系统的传递函数为:
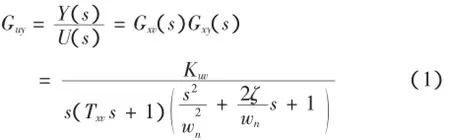
式中Kuv为电压速度增益,Kuv=KuxvKq/Ap
系统采用PID控制,根据式(1)可得出摆幅机构电液比例位置控制系统框图,如图3所示。
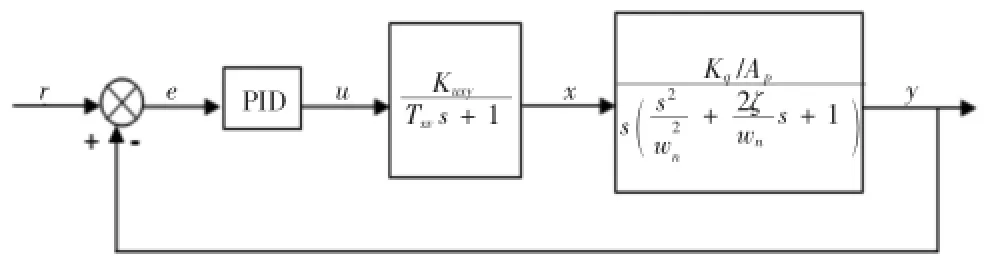
图3 摆幅机构电液比例位置控制系统框图
系统采用4BY-H10比例方向阀,液压缸的行程为750 mm,活塞杆外径d=27 mm,缸筒内径D=54 mm.系统的主要仿真参数为F=30 000 N,M=145 kg,ρ=870 kg/m3,βe=700MPa,τ=12.5 ms,Cd=0.7,W=2.33mm.根据相关的文献资料可以计算得到:Ap=0.002 078 125m2,Kq=5.44 884 375×10-5,Kuxv=1,wn=356.2 352 499 rad/s,Txv=0.011 s,ζ= 0.05 290 093 462.将以上数据代入式(1),可得到系统的传递函数为:

3.2摆幅机构电液比例控制系统的仿真分析
MATLAB的Simulink工具箱是一个对动态系统进行建模、仿真和分析的软件包,利用它可方便地对系统进行仿真分析[7]。分别给系统斜率为1的斜坡输入信号和数值为4的阶跃输入信号,基于Simulink建立摆幅机构的动力系统的仿真模型,如图4所示,其中(a)图为斜坡输入信号,(b)图为阶跃输入信号。调节PID控制器的参数,改善系统的性能,当KP=2000,KI=10,KD=0.5时,得到仿真结果如图5所示,图(a)为斜坡响应,图(b)为阶跃响应。
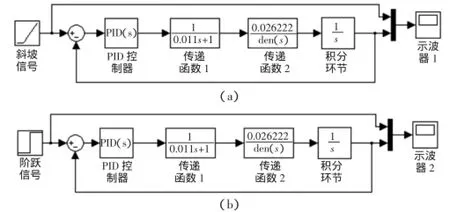
图4 系统的仿真模型
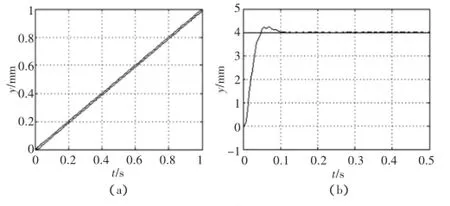
图5 仿真结果
从图5中可以看出,系统对输入信号有良好的跟踪性,对阶跃信号的动态响应良好,超调量为0.3 mm左右,调整时间短,能很快达到稳定状态。结果表明,通过选择合适的PID参数,可以很好地改善系统的性能,该摆幅机构电液比例控制系统能够很好地满足摆幅机构位置控制精度和运动控制的要求。同样可以用上述方法对桁架式桥梁检测车其他系统进行分析研究。
4 结束语
本文对桁架式桥梁检测车的结构组成、工作原理、液压原理进行了分析,分析结果表明桁架式桥检车的转动惯量大,旋转机构液压回路应使用缓冲回路,以减小液压冲击;各伸缩机构和摆幅机构应采用平衡回路,防止由于负载作用出现误动作,提高安全性。对摆幅机构电液比例控制系统进行仿真分析,结果表明通过调节PID控制的参数,能明显改善系统系能,使摆幅机构系统满足工作要求。利用Simulink对系统进行仿真分析可以方便修改参数,直观得到仿真结果,提前了解系统的动态特性,提高设计和分析系统时的效率。
[1]龚栋梁.国内外桥梁检测发展概述[J].商用汽车,2009,(06):100-102.
[2]崔文毅,潘夏表.桥梁检测车在桥梁检测中的应用[J].筑路机械与施工机械化,2006,(12):42-44.
[3]龚栋梁.桥梁检测车的研究与开发[D].武汉:武汉理工大硕士论文,2009:15-20.
[4]杨一明.桁架式桥梁检测车关键技术研究[D].西安:长安大学硕士论文,2007:9-10.
[5]王积伟,章宏甲,黄谊.液压与气压传动[M].北京:机械工业出版社,2005.
[6]王凡.智能桥梁检测车臂架系统的研究[D].广州:广东工业大学硕士论文,2005:20-21.
[7]薛定宇.基于MATLAB/Simulink的系统仿真技术与应用[M].北京:清华大学出版社,2002.
The Simulation Analysis and Research of the Truss Bridge Inspection Vehicle and its Hydraulic System
XING Hong-liang,GUAN-ge,YUEWei-ping
(College of Engineering and Mechanical Engineering,Chang’an University,Xi’an Shaanxi 710064,China)
This paper introduces the structure and working principle of a kind of truss bridge inspection vehicle as the research object.And its hydraulic system is analyzed.And using the simulink of swing amplitudemechanism of electro-hydraulic proportional control system is studied by simulation.The results show that by adjusting the parameters of the PID controller that conveniently and effectively improve the system’s performance,verify through the correct mathematical modeling and using the simulink to system simulation analysis,to advance understanding of the properties of the system and design system to improve the efficiency.This paper provides an important reference for the improvement of the performance of the truss bridge inspection vehicle and related fields.
truss bridge inspection;vehicle hydraulic system;swingmechanism;simulink
TH137
A
1672-545X(2016)06-0064-03
2016-03-27
邢红亮(1988-),男,河北石家庄人,在读硕士研究生,研究方向为工程机械液压系统设计,减速器设计与研究。
