家用纯电动汽车的总体设计与分析
2016-09-19刘晓红贾梓镔段治军
刘晓红,贾梓镔,段治军
(广西制造系统与先进制造技术重点实验室广西大学机械工程学院,广西南宁530004)
家用纯电动汽车的总体设计与分析
刘晓红,贾梓镔,段治军
(广西制造系统与先进制造技术重点实验室广西大学机械工程学院,广西南宁530004)
采用传统汽车的设计方法设计了一款适合家用、上班代步的纯电动汽车。通过类比初步确定纯电动汽车的部分参数。利用UG NX进行汽车总体设计(包括H点设计、2D人体模型设计、座椅线设计、手伸范围、镜像认证等),确定汽车最终参数,绘制汽车车身轮廓图。利用MATLAB进行操纵动力学建模,对汽车进行操纵稳定性校合,验证了电动汽车的可靠性。
纯电动汽车;总体设计;UG NX;动力特性
随着我国经济发展水平快速提高,新能源汽车的开发与利用成为了汽车产业中的一个重点研究方向。相比于传统汽车,纯电动汽车以电动机及其控制系统取代了内燃式汽柴油发动机动力系统,省去发动机、变速器、油箱、冷却系统和排气系统等装置,同时简化了底盘中的传动系统,具有污染小、成本低、高能量转换效率等优点。目前国内外的电动汽车的研究已取得了一定的进展,但未具备大规模推广纯电动汽车的基础[1]。
汽车总体设计是在满足车身造型要求下,对电机、驱动装置、悬架机构等总成,油箱、电器设备、备胎等部件,车身内饰总成和部件等所在的位置,以及车身室内空间大小、行李箱尺寸和车身等主要技术参数设计确定的过程[2-4]。采用传统汽车的设计方法设计一款适合家用、上班代步的纯电动汽车,主要包括汽车形式的选择、主要参数的确定、UG NX汽车车身布置设计以及汽车操纵稳定性校合。
1 汽车形式的选择和主要参数的确定
1.1汽车车身形式和结构形式的选择
轿车车身的基本形式包括折背式、直背式和舱背式三种。发动机排量在1.0 L以下的轿车,主要采用舱背式车身。根据设计对象,确定类型为乘用车,将电动汽车类比于发动机排量在1.0 L的smart for two轿车,车身形式选用舱背式[5]。
由于设计的电动汽车总质量较小,因此采用两轴形式,选择4×2驱动。同时为了使汽车轴荷合理分配、获得较大的行李空间,选用电机前置的驱动方式。
1.2整车参数
设计的家用的纯电动汽车,参数的选择类比于发动机排量在1.0 L的smart for two轿车。按照选择的汽车结构形式和发动机排量,初步确定汽车的轴距为1 860 mm,轮距为1 280 mm,根据汽车总长La=轴距L/C,选定比例系数C为54%,得出全长尺寸初步计算,根据总宽Ba=(La/3)+195 mm±60 mm得出全宽尺寸初步计算[2],如表1所示。

表1 整车参数
1.3质量参数
根据电动汽车的用途、载客人数以及载物质量,综合考虑汽车的整备质量、装载质量和总质量。同时因采用电机前置前轮驱动,所以前轴的轴荷应大于后轴。选定其它的质量参数,如表2所示。
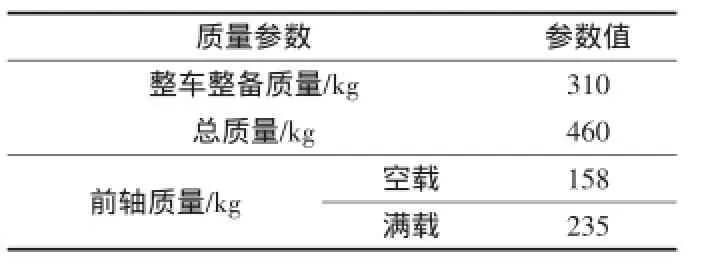
表2 质量参数
1.4性能参数
通常用来评定汽车的性能指标主要有:动力性、能源经济性、制动性、操控稳定性、舒适性以及通过性等[6]。根据参考设计要求和国家法规标准,设计纯电动汽车的动力性参数为最高车速≥80 km/h;能源经济性参数:百公里能耗10 kW·h/km,预计续驶里程180 km;整车的通过性参数:最小转弯直径≥7.5 m,最小离地间隙≥0.18 m,接近角20°,离去角22°,纵向通过半径8 m;操纵稳定性参数:不足转向特性2°,车身侧倾角3°,制动点头角1°.
1.5轮胎的确定
选取的轮胎应为子午线轮胎。查阅GB/T2978—2008(轿车轮胎规格、尺寸、气压与负荷),根据设计要求确定轮胎的各个参数[3]:轮胎规格175/65 R14,负荷指数82,新胎断面宽度177 mm,新胎外半径584 mm,滚动半径284 mm、静负荷半径267 mm,充气压力250 kPa,负荷能力475 kg.
2 UG NX汽车总体布置设计
汽车总体布置(General Packaging)是帮助设计者进行汽车总体设计的工具,主要解决汽车总体设计过程中的难点,如人机工程、视野校核、发动机跳动等[7]。
2.1 H点设计
以男女乘员比例为50﹕50的A类车辆为设计模型,运用UG NX软件中H点设计工具创建驾驶室内的关键参考点,包括每个乘坐位置的座椅参考点(SGRP)、脚踏板踵点(AHP)、脚心点(PRP)等。同时依据座椅参考点定义,确定相应的腿长参数为:大腿456 mm、小腿459 mm,设计目标靠背角度为22°,目标腰部支持0°,目标座垫角度为15°,座椅偏转角0°,生成的H点模型如图1所示。

图1 生成的H点模型
2.2 2D人体模型
根据所生成的H点模型初步设计相应人体模型姿势参数,通过驾驶姿势检测和运动副角度检测并进行设计校核,完成参数设定如表3所示,创建符合SAE标准的2D人体模型,包括人体躯干的各主要部分,并产生由SGRP、AHP、SWC(方向盘中心点)构成的“人体三角形”,如图2所示。

表3 人体模型姿势参数

图2 2D人体模型结果
2.3手伸范围
汽车车身设计的一条重要原则是:驾驶室内的一切手操作钮件、开关、杆件等的位置均应在驾驶员手伸及界面之内。根据SAE J287标准要求,运用UG NX软件中手伸范围设计工具创建表示驾驶员最大手伸范围的轮廓面,完成参数设定,系统生成手伸范围的轮廓面,结果如图3所示。

图3 伸手范围结果示意图
2.4眼椭球
眼椭球是指不同身材的驾驶员按自己的意愿将座椅调整到适宜位置,并以正常的驾驶姿势入座后,他们眼睛位置在车内坐标系中的统计分布图形。眼椭球主要应用于人机工程中关于视野的校核,如挡风玻璃、后视镜、仪表板等的视野校核。其参数设定如图4、表4所示。
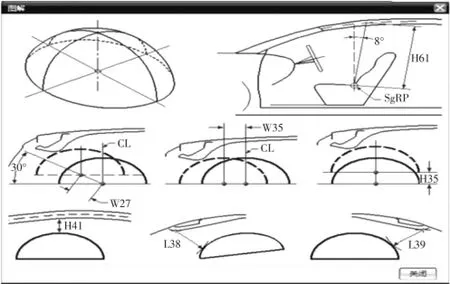
图4 头轮廓和间隙图例

表4 眼椭球参数
2.5其余参数的确定
仪表板可见度功能使人们能够根据方向盘和开关控制杆的尺寸,计算机动车仪表板的可见和不可见区域。使用此功能能够在车辆设计的早期阶段确定方向盘及其开关控制杆是否符SAE J1050a的建议,其中方向盘设计图解如图5所示。

图5 方向盘设计图解
此外,运用车辆设计工具包再进行地毯和膝部间隙、后视图和门口尺寸、座椅尺寸、安全带固定装置等的设计,得到汽车的初步参数。
2.6汽车车身轮廓图的绘制及最终参数的确定
经过UG NX进行内部总体设计后,画出汽车车身轮廓图,如图6所示。并获得最终的设计数据,如表5所示。

图6 车身轮廓图

表5 汽车车身尺寸参数
3 动力特性分析
汽车的操纵稳定性与汽车行驶时的瞬态响应有着密切的关系,通常采用转向盘角阶跃输入下的瞬态响应来反映汽车的操纵稳定性。根据最终参数,基于MAT LAB对汽车进行操纵动力学建模[6],得出角阶跃输入下的横摆角速度时域响应,如图7所示。由图7可见,对于执行上的误差,经过计算,其超调量为129%.而汽车进入稳态所经历的时间大致为0.6 s.表明汽车在36 km/h的速度下行驶时,其在时间上的滞后很短,说明转向响应迅速、及时[8-9]。

图7 角阶跃输入下的横摆角速度时域响应
4 结束语
类比于传统汽车的设计方法,提出了一种纯电动汽车的简易设计方案,对纯电动汽车的总体设计做了创新应用。在UG NX软件中完成了汽车车身总体布置设计和最终参数匹配与校核的工作,并基于MAT LAB对汽车进行操纵动力学建模,对汽车操纵稳定性进行了评估。设计的家用纯电动汽车,其设计要求和各项参数符合相关法规及设计手册的设计标准,尤其是利用UG NX软件进行汽车总体设计和参数匹配与校核,对以后纯电动汽车的设计提供参考。
[1]张翔,赵韩,张炳力,等.中国电动汽车的进展[J].汽车研究与开发,2004,(1):77-79.
[2]王望予.汽车设计[M].北京:机械工业出版社,2004.
[3]黄晓云.汽车总体设计专家系统的研究与开发[M].沈阳:东北大学出版社,2007:105-127.
[4]黄晓云,张凤赐,张国忠,等.基于现代化技术的汽车总体设计参数选择方法[J].中国工程机械学报,2004,2(1):69-74.
[5]刘齐茂.汽车车架的结构优化设计[J].机械设计与制造,2005,(4):1-3.
[6]刘清虎,郭孔辉.动力参数的选择对纯电动汽车性能的影响[J].湖南大学学报,2003,S1:62-64.
[7]周定陆,杜子学.汽车总体布置应考虑的问题[J].汽车研究与研发,2001,(02):23-26.
[8]陈桂明.应用MATLAB建模与仿真[M].北京:科学出版社,2001:55-58.
[9]高大威,振华,青春.基于MATLAB的燃料电池汽车动力系统仿真7[J].系统仿真学报,2005,17(8):55-59.
The OverallDesign and Analysis ofHousehold Pure Electric Vehicles(PEV)
LIU Xiao-hong,JIA Zi-bin,DUAN Zhi-jun
(Guangxi Key Laboratory of Manufacturing System&AdvancedManufacturing Technology,School ofMechanical Engineering,Guangxi University,Nanning 530004,China)
Based on the designingmethods of traditional automobiles,a Pure Electric Vehicles(PEV)suitable for family to work was designed.Some parameters of pure electric vehicle were initially identified by using themethod of analogies.And the final parameters of the car were determined by the overall design on UG NX(including the design of H point,2D Manikin,seat line design,the certification scope of hand,mirror image,and tire envelope,etc.),then plot the auto body contours.And use MATLAB tomanipulate dynamicsmodeling,to verify vehicle’s handling and stability,ensure the reliability of the electric car.
pure electric vehicles(PEV);overall design;UG NX;dynamic characteristics
U469.72
A
1672-545X(2016)06-0007-04
2016-03-16
广西制造系统与先进制造技术重点实验室基金项目(项目号:13-051-09S07)。
刘晓红(1980-),女,广西博白人,硕士,副教授,硕士生导师,主要研究方向:机械结构强度学、材料加工工程。
