基于事件驱动控制理论的风力发电系统建模
2016-09-18邱强杰俞晓鹏尹子中
邱强杰,陈 众,俞晓鹏,尹子中,文 亮,李 奇
(1. 国网湖南省电力公司 娄底供电公司,湖南娄底417000;2. 长沙理工大学 电气与信息工程学院,湖南长沙410114;3. 国网浙江省电力公司 金华供电公司,浙江金华321000;4. 国网浙江省电力公司 绍兴供电公司,浙江绍兴312000;5.国网安徽省电力公司 蚌埠供电公司,安徽蚌埠233000)
基于事件驱动控制理论的风力发电系统建模
邱强杰1,陈众2,俞晓鹏3,尹子中4,文亮2,李奇5
(1. 国网湖南省电力公司 娄底供电公司,湖南娄底417000;2. 长沙理工大学 电气与信息工程学院,湖南长沙410114;3. 国网浙江省电力公司 金华供电公司,浙江金华321000;4. 国网浙江省电力公司 绍兴供电公司,浙江绍兴312000;5.国网安徽省电力公司 蚌埠供电公司,安徽蚌埠233000)
风力发电系统工作状态复杂多变,存在很多非线性的因素,常规模型难以展现其运行过程的变化。为了研究风力发电系统的状态转移,提高风电机组状态监控可靠性,运用事件驱动控制理论中的有限状态机建模方法,对机组工作状况与运行规则进行分析,把系统潜在的工作状态、风机运行参数以及状态转移条件等元素搭建成一个由外部条件触发事件,事件驱动状态转移的有限状态机模型。运用Matlab中的Stateflow模块进行仿真,仿真结果表明,此模型可以准确反映风力发电系统的运行状况,状态转移情况直观清晰,在风电机组的状态监控可以良好应用。
风力发电系统;事件驱动控制理论;有限状态机;状态转移
0 引言
我国的风力发电事业相对许多发达国家来说底子比较薄弱[1],与之相关的多项技术研发能力不足,风电机组的状态监测技术的研发也相对滞后,导致风电机组在运行过程中故障停机事件频发,严重影响了日常生产,造成了许多不可弥补的重大损失。风力发电机组的状态监测系统是机组实现远程监控的基础,可以大大提高风力发电机组的运行可靠性,也为机组的无人值守提供了可能,对风力发电系统状态转移的研究可以为实现连续在线状态监控打下基础,为降低设备故障损失做出努力[2]。
目前,国内外已经出现了多种建模方法,早期的如机理分析法、测试法,以及近年来新兴的神经网络与马尔可夫等。这些方法虽然在一定方面描述出了风电机组的特性,却忽略了风力发电系统工作状态的变化,对机组状态转移过程的研究还不够充分。运用事件驱动控制理论中的有限状态机方法对风力发电系统进行状态监测建模,可以将风力发电系统的运行过程客观的描述出来,把系统内在的运行逻辑条件用可见的事件驱动状态转移的方式来表达,事件的触发由机组运行参数的变化引起,系统状态转移过程的透明性大大提高[3]。
1 事件驱动控制理论
事件驱动控制理论是非线性控制理论的重要部分,不同于普通的连续事件动态系统,其事件发展规律呈不确定的离散性变化,具有强力改善非线性控制性能、简化控制系统结构、处理不确定模型与分析强非线性系统等突出优点[4]。随着计算机网络技术等高新技术的快速发展,事件驱动控制理论的研究也取得了丰硕的成果,并在国内外多个技术领域应用取得了成功,例如,雷达跟踪控制、飞行器角加速度控制与工业过程控制系统设计等从分析到设计的多个重要阶段。在多领域的运行实验中取得的成果,证明了事件驱动控制理论的可行性,并逐渐对其他领域进行渗透,风力发电机组的控制符合该理论的发展与状态迁移的规则。
不同于常规控制系统理论中的传统时间驱动控制系统,事件驱动控制系统的信号通信与控制器运算都是由不同的事件来驱动的,而不是按固定时间周期性的驱动,故又称之为异步控制系统或非周期性控制系统[5]。事件驱动系统属于经典的Client/Server(客户机和服务器)结构,大体上由事件发生器、事件消费终端(客户)以及事件服务器3部分组成,具体结构如图1所示。系统的输入事件在事件产生器中产生,它既可以通过设置系统的数据来定义,例如某个数据超过等于或低于某一具体数值时事件触发,也可以直接在外部通过输入设备直接输入。服务器有识别事件是否触发的功能,当某一具体事件达到触发要求,服务器会给事件消费终端发出系统信息,事件消费终端则负责做出与该事件相应的系统动作[6]。
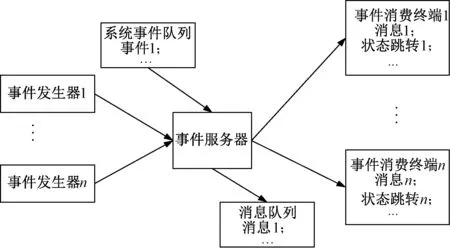
图1 事件驱动系统结构图
2 有限状态机介绍
自动机是一种具有记忆和逻辑判断功能的动态模型,它有其固定的内部状态,在信息处理方面有着强大的功能,在事件驱动领域的建模与分析中也有其独到的作用[7]。有限状态机(Finite State Machine简称FSM)是自动机的一种,在事件驱动控制理论研究中可以良好应用,是一种理论化的建模方法,对客观事物可以直观地描述[8]。它早期应用于计算机的程序语言设计,用来检验程序语句是否符合语法要求,随着计算机及其网络技术在其他领域的广泛应用,有限状态机逐渐在游戏、电路等行业得到了极大发展,由于各方科学家的积极参与,在20世纪80,90年代就已经形成了多个有限状态机通用工具库,到如今已经有了多个不同的版本。在一段时间的积累后,近年来又在通讯、医疗、电子、机器语言等领域取得了较大成果。
在一个确定型的有限状态机A中,可以把整个有限状态机模型分为5个不同的工作集合A={Z,X,C,V,B}[9],其中:
Z={Z1,Z2,…,Zn}为系统有限工作状态的集合;
X={X1,X2,…,Xn}为系统所有触发事件的集合,触发事件激活则驱动相应的状态转移;
C={C1,C2,…,Cn}为系统状态转移函数集合,状态转移函数决定触发事件驱动状态转移的规则;
V={V1,V2,…,Vn}为系统的初始状态集合;
B={B1,B2,…,Bn}为系统输出事件的集合;
具体状态转移规则如图2所示。
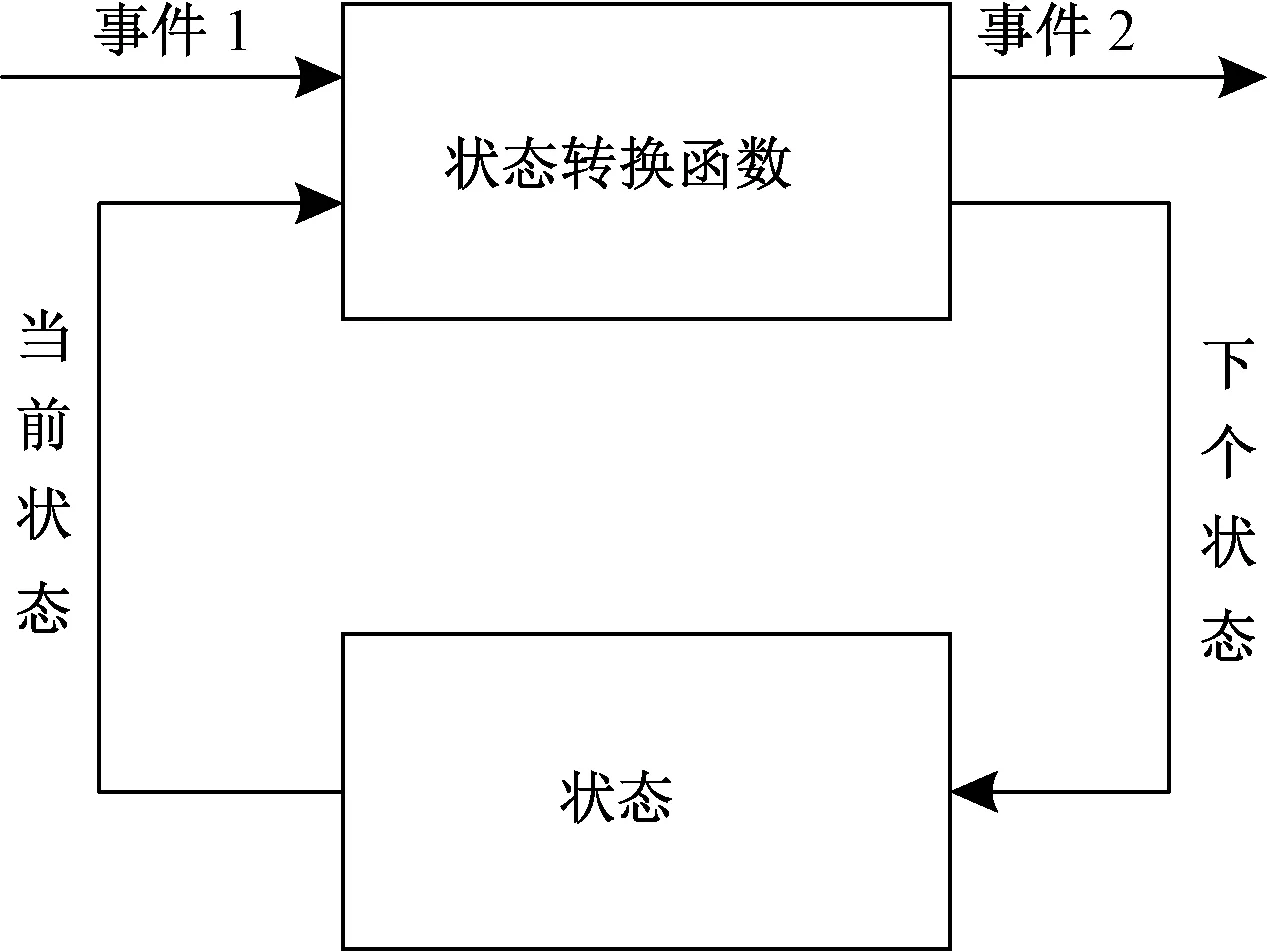
图2 有限状态机结构图
状态的迁移由系统当前工作状态和触发事件的类型来决定,不同的触发事件可能造成的状态转移情况不同。
3 风力发电系统有限状态机建模
3.1模型设计策略
模型把风力发电系统分为主控制系统、偏航系统、变桨系统、发电系统、刹车系统与停机处理系统6个部分[10]。通过有限状态机建模,给每个系统建立独立、有完整从初始状态到终结状态变化状态序列的状态机模型。它们平等合作又相互制约,由主控制系统内共享的事件与其他变量来协调其他5个部分复杂的逻辑关系。通过对系统工作状态跳转状况的观察,可以清晰地了解机组的内部运作机制和整个机组的运行状况。鉴于本系统模型过于庞大,本文着重介绍主控制系统模型。
3.2主控制状态机设计
3.2.1主控制系统运行过程分析
风电机组开机后,主控制系统首先会进行系统自检,检查系统是否有错误,无错误则转入待机的空闲状态,此时机组的风速传感器将会把实时的风速信息传到控制系统中,直到风速达到系统启动风速后启动偏航电机对风。偏航成功以后当风速达到发电机切入风速,制动系统将松开刹车,发电机开始切入运行。在此期间,为了保证发电机运行在额定风速下,变桨系统会随着风速的变化而改变其桨距角,运行稳定之后即可并网运行。
3.2.2主控制系统有限状态机建模
为了使系统模型建立更加直观,状态机的建立用到了Matlab中的Stateflow模块。Stateflow是Matlab中专门处理复杂逻辑信号的一个模块,在事件驱动控制系统的建模与分析中能够很好的体现。用此模块搭建的模型,具有可视化和仿真直观等优点,可以清楚地把复杂动态逻辑表现出来,符合有限状态机(FSM)的基本原则。利用Stateflow与Simulink相结合来建模可以扩展模型的功能。
通过对主控制系统运行过程的分析可将整个系统分为10个工作状态,它的有限状态机设计图如图3所示。
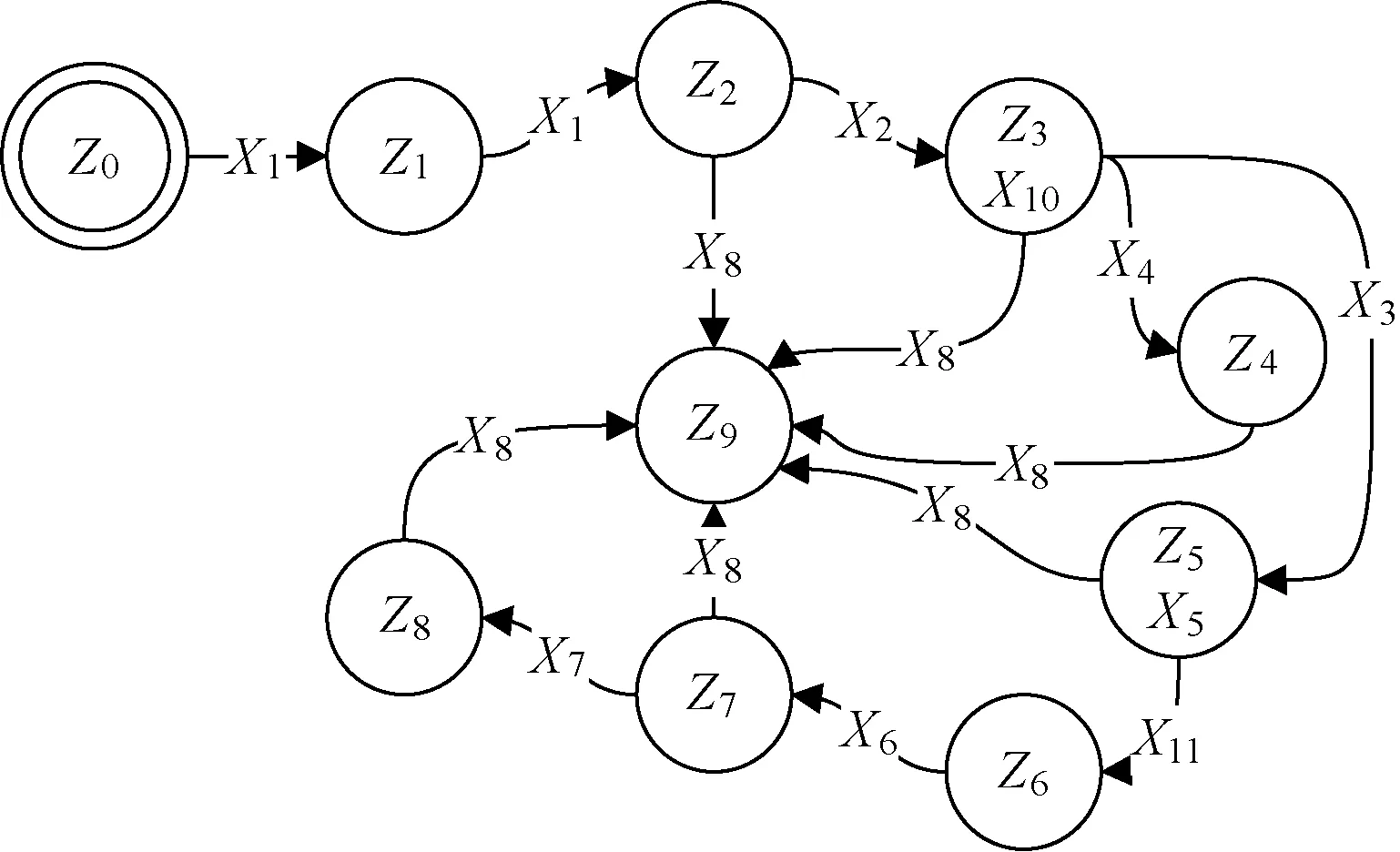
图3 主控制有限状态机
Z0(Con_state=0):这是默认转移状态,开始仿真后会首先激活此状态。它所代表的功能是系统读取配置文件并初始化,检测机组是否可以正常工作。
Z1:系统的空闲待机状态。当系统初始化完成并且没有发生错误会自动转到此状态。在此状态下,机组的传感器开始工作,将实时的各项数据传递给控制系统。
Z2(Con_state=2):在此状态下,会关注实时的风速变化,当风速达到系统的启动风速时,将会发出信号给偏航系统。
Z3(Con_state=3):当收到风速达到的信号后,此状态会给偏航系统发出启动的指令,系统开始偏航。
Z4(Con_state=4):如果在偏航过程中绕缆圈数达到解缆的要求,偏航系统会发出请求解缆的指令。
Z5(Con_state=5):当偏航系统对风完毕偏航角度不再变化以后,启动发电系统。
Z6(Con_state=6):发电系统应答之后开始传动,当发电机转速达到切入系统转速时松开刹车,发电机开始发电。
Z7(Con_state=7):如果发电机转速没有达到其额定转速则启动变桨系统,通过调节合适的桨距角来调节发电机的转速,发电机转速达到额定转速时并网运行。
Z8(Con_state=8):系统并网运行状态。
Z9(Con_state=9):风速超过切出风速或者低于启动风速时,系统会停机继续待机直到风速重新符合要求。在工作期间,如果出现急停、操作状态由自动切换到手动或者维护状态、需要解缆等状况,系统也会进入停机处理状态。
Con_state为工作状态编号,Con_state的数值变化反映了状态的跳转。
触发事件是驱动状态转移的唯一动力,只有在当前状态下激活与之对应的相应触发事件才会转移到下一个状态。触发事件一般会结合系统的工作原理来设定,会与机组的实时参数相对照,它既可以从外部输入也可以在内部定义,如ST_yaw_start为主控制控制偏航系统启动的命令,只有在Con_state=3状态激活时才会激活,而此时wind_speed>=ST_speed风速大于启动风速已经被激活了,状态也已经转到了Z3。输出事件可以输出到整个状态机中并应用到其他的子状态机中进行信息的交互,具体的触发事件如表1所示。

表1 触发事件表
系统的数据也跟触发事件一样,既可以从外部输入,也可以在有限状态机数据一栏里面直接定义,在需要的时候还能输出到系统中供本模型其他部分所用,具体数据如表2所示。
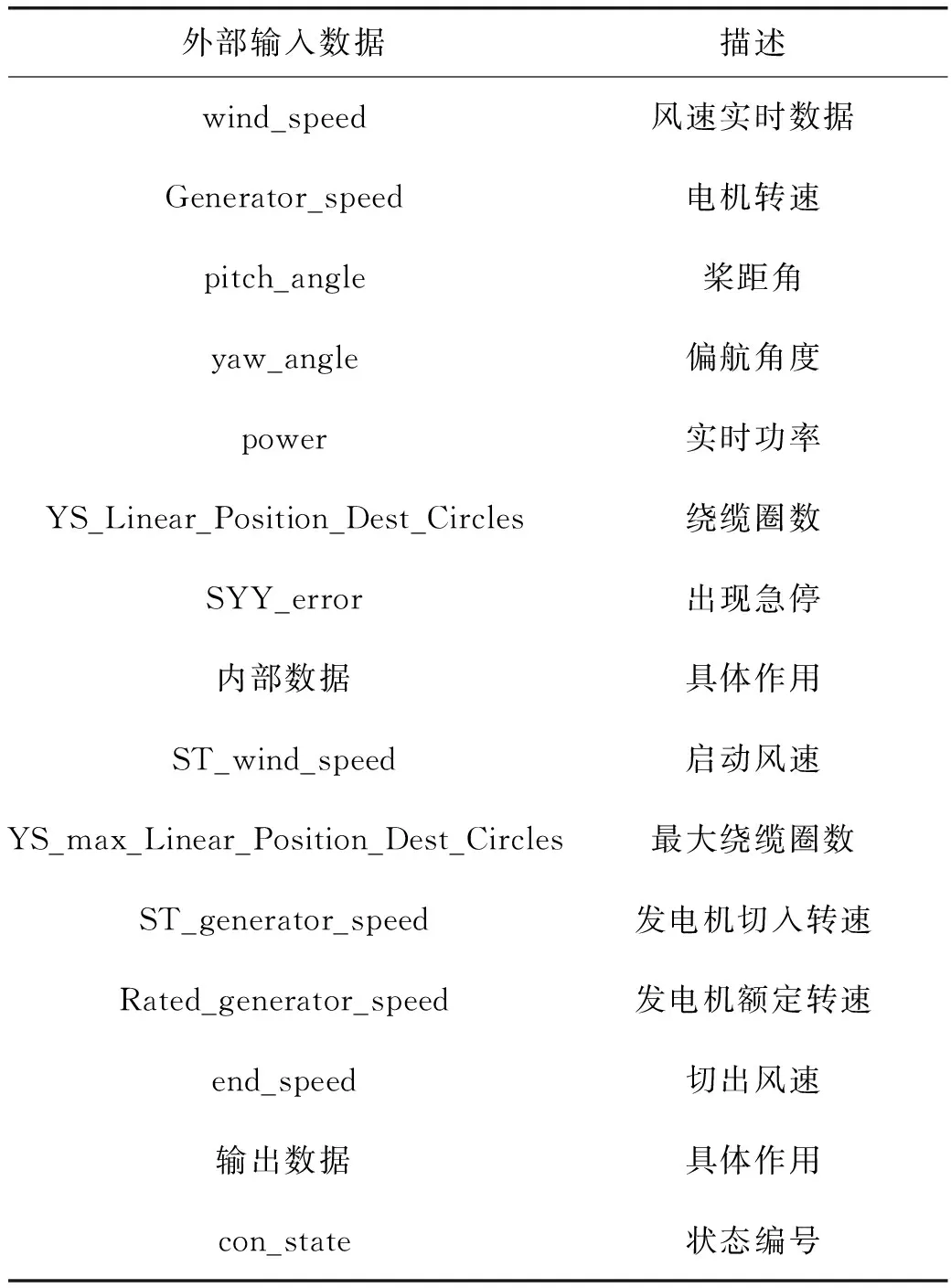
表2 数据清单
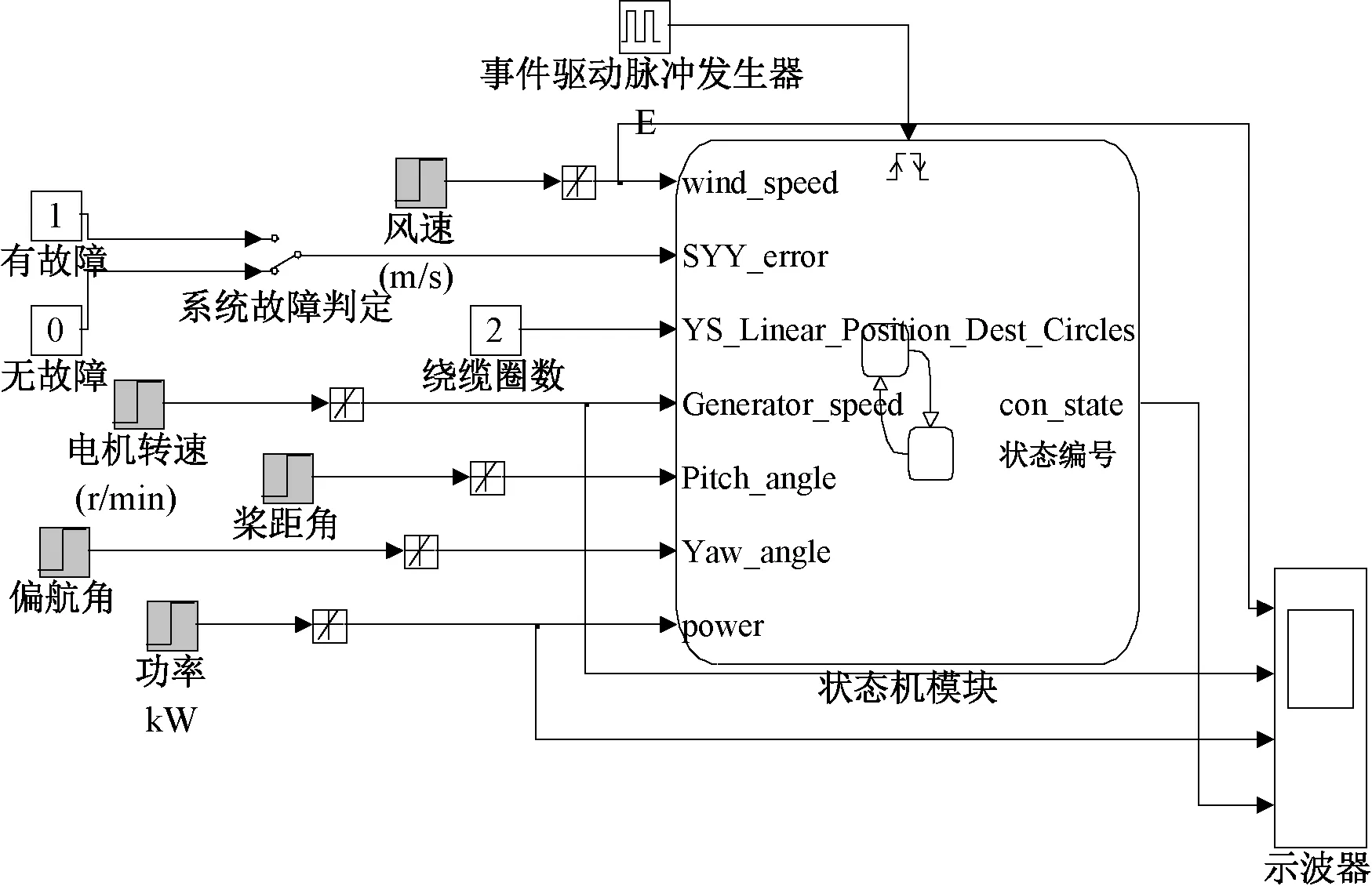
图4 有限状态机仿真
4 仿真试验
在Stateflow模块中建立起有限状态机模型并设置好参数后,再在Simulink中接入风电机组的必要运行参数即可启动仿真。Simulink仿真如图4所示,有限状态机的状态转移由事件驱动脉冲发生器E的过零信号来驱动,此脉冲发生器触发类型为上升沿,周期设置为10 s,即每10 s驱动一次检测,如果满足了需要的触发事件,当前状态则跳转到下一个工作状态,不满足则继续停留在原状态。当此周期设置的比较小时,驱动触发事件的检测次数会变得频繁,即系统监测状态转移会更加灵敏,一旦触发事件被激活即可驱动相应的工作状态迁移。
模型中的风力发电机组参数以600 kW风机为标准,内部数据ST_wind_speed(启动风速)设置为3 m/s;end_speed(切出风速)25 m/s;YS_max_Linear_Position_Dest_Circles(最大绕缆圈数)3圈;ST_generator_speed(发电机切入转速)600 r/min;Rated_generator_speed(发电机额定转速)1 800 r/min;额定功率1 500 kW。在将此模型应用到不同规格的风电机组时,只需要更改这些参数即可。
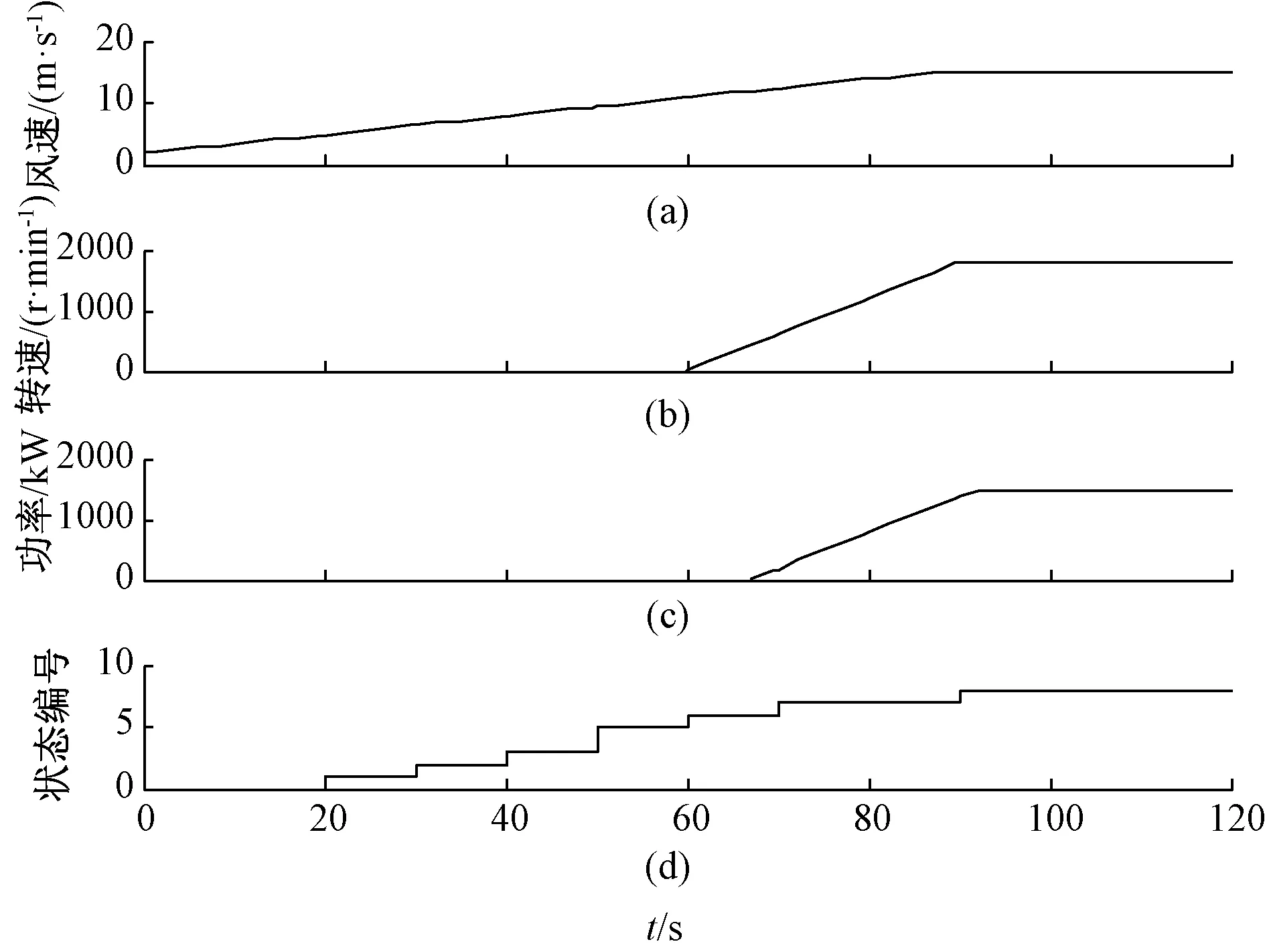
图5 有限状态机模型仿真波形图
有限状态机模型仿真波形如图5所示,图5(a)是风速wind_speed,图5(b)是电机转速Generator_speed,图5(c)是发电机的功率power,图5(d)是状态编号con_state。开启仿真后状态机首先检测默认转移状态,10 s后转移到系统默认状态con_state=0(读取配置文件并初始化);20 s时系统无错误则转到空闲状态con_state=1,紧接着进入监测风速状态con_state=2;40 s时监测到风速达到启动风速,状态转移到启动偏航系统对风状态con_state=3;偏航结束后,在50 s时状态转移到con_state=5(启动发电系统),发电系统成功应答后开始传动,发电机转速到达切入转速600 r/min时开始发电,状态转移到con_state=6;电机转速达不到额定转速则在70 s时进入con_state=7(开启变桨系统);电机转速达到额定值,在90 s时状态转移到并网运行状态con_state=8。
从仿真结果可以清楚观察到,用有限状态机方法搭建的风力发电机组主控制系统模型可以随着风机参数的改变而触发事件,事件驱动相应的状态转移。证明了事件驱动控制理论应用到风力发电系统的建模上是可行的,模型客观描述了风力发电系统的逻辑运作,状态转移迅速准确,具有研究价值。
5 结论
本文将事件驱动控制理论中的有限状态机建模方法应用到风力发电系统的工作状态转移研究中,并通过Matlab软件的Stateflow模块进行有限状态机的建模与仿真,把难以用普通方法来描述的风力发电机组内部逻辑客观地表述出来。仿真结果表明,基于事件驱动控制理论的风力发电系统模型,能够准确地通过风电机组的运行参数反映机组工作状态的转变,状态迁移的过程清晰可视,具有极高的可靠性。
[1]罗来军,朱善利.我国新能源战略的重大技术挑战及化解对策[J].数量经济技术经济研究,2015(2):113-143.
[2]罗承先.世界风力发电现状与前景预测[J].中外能源,2012(3):1-10.
[3]王之华,王志新.大型风力发电机组状态监测与控制技术研究[J].机电一体化,2008(11):41-44.
[4]张威.Stateflow逻辑系统建模[M].西安:西安电子科技大学出版社,2007:25-30.
[5]王航飞.基于事件驱动的多智能体系统的环形编队控制研究[D].北京:华北电力大学,2015.
[6]何鸿君,曹四化,诸祖高,等.一种改进的事件驱动系统框架[J].国防科技大学学报,2008,30(3):70-75.
[7]谭同超.有限状态机及其应用[D].广州:华南理工大学,2015.
[8]崔家瑞,李擎.基于有限状态机的智能抄表集中器设计与实现[J].实验室研究与探索,2014,33(8),134-139.
[9]罗元剑,姜建国,王思叶,等.基于有限状态机的RFID流数据过滤与清理技术[J].软件学报,2014,25(8):1713-1728.
[10]汤敏,谭芝,李奇,等.基于FSM的风电系统运行状态监测[J].电力学报,2013,28(5):404-408.
Modeling of Wind Turbine Generator System Based on Event-driven Control Theory
QIU Qiangjie1, CHEN Zhong2, YU Xiaopeng3, YIN Zizhong4, WEN Liang2, LI Qi5
(1.State Grid Loudi Electric Power Supply Company,Loudi 417000, China;2. College of Electrical and Information Engineering, Changsha University of Science & Technology,Changsha 410114, China;3.State Grid Jinhua Electric Power Supply Company,Jinhua 321000, China;4.State Grid Shaoxing Electric Power Supply Company,Shaoxing 312000, China; 5. State Grid Bengbu Electric Power Supply Company,Bengbu 233000, China)
The wind power generation system is complex and variable, and many nonlinear factors exist under working condition. Due to the reason mentioned above, it is difficult for the conventional model to demonstrate the change of its operation process. To study the state transition process of wind turbine generator system and improve the reliability of wind turbine state monitoring system, with the method of finite state machine model, which is based on the event-driven control theory, the working conditions and operation rules of the unit are analyzed. Meanwhile, by combining the elements of working state of the potential system, parameters of the fan operation and state transition conditions as a whole and treating them as an event triggered by the external conditions, an event driven state transition of the finite state machine model is built. By using the state flow module in MATLAB simulation, the results are obtained and show that this model can accurately depict the operating conditions of the wind power system and the state transition is intuitively clear. The model can be applied well in wind turbine state monitoring system.
wind turbine generator system;event-driven control theory;the finite state machine;state transition
2016-03-07。
邱强杰(1991-),男,硕士研究生,研究方向为电力系统运行与控制,E-mail:719952137@qq.com。
TK89
A
10.3969/j.issn.1672-0792.2016.08.008